







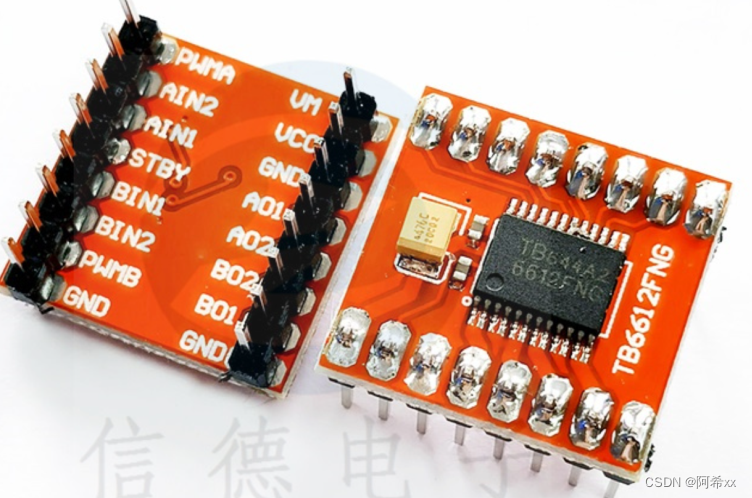
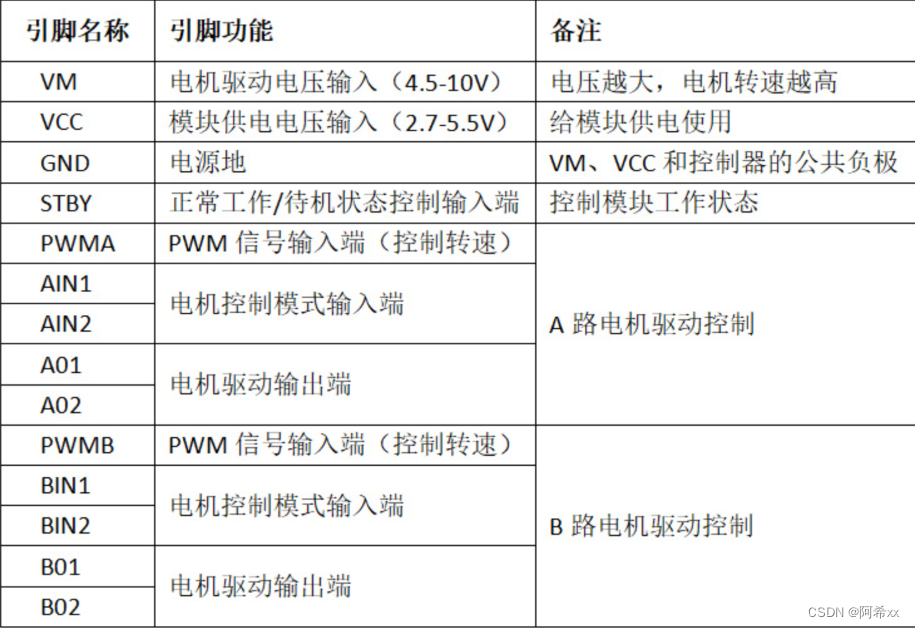
根据手册可以知道我们
只要控制AIN和BIN就能控制小车是向前走还是向后走,向左转还是向右转
控制PWMA和PWMB就能控制车子的转速
通过下面的表我们可以得出
方向 AIN1 AIN2 BIN1 BIN2
前 0 1 0 1
后 1 0 1 0
左 1 0 0 1
右 0 1 1 0

通过原理图我们可以见到
AIN1对应PB13
AIN2对应PB12
BIN1对应PB1
BIN2对应PB0
PWMA对应PA11
PWMB对应PA8
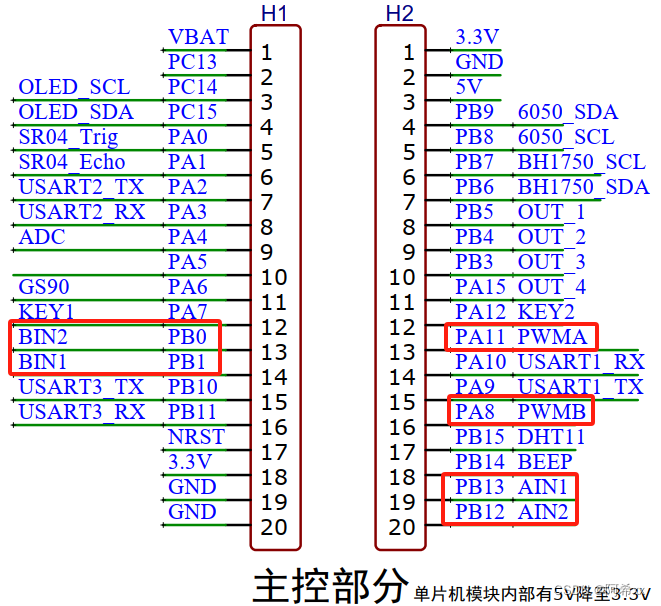
所以我们新建一个文件名为TB6612.c用于存放
根据手册可以知道我们
只要控制AIN和BIN就能控制小车是向前走还是向后走,向左转还是向右转
控制PWMA和PWMB就能控制车子的转速
通过下面的表我们可以得出
方向 AIN1 AIN2 BIN1 BIN2
前 0 1 0 1
后 1 0 1 0
左 1 0 0 1
右 0 1 1 0
通过原理图我们可以见到
AIN1对应PB13
AIN2对应PB12
BIN1对应PB1
BIN2对应PB0
PWMA对应PA11
PWMB对应PA8
所以我们新建一个文件名为TB6612.c用于存放

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























