1 题目

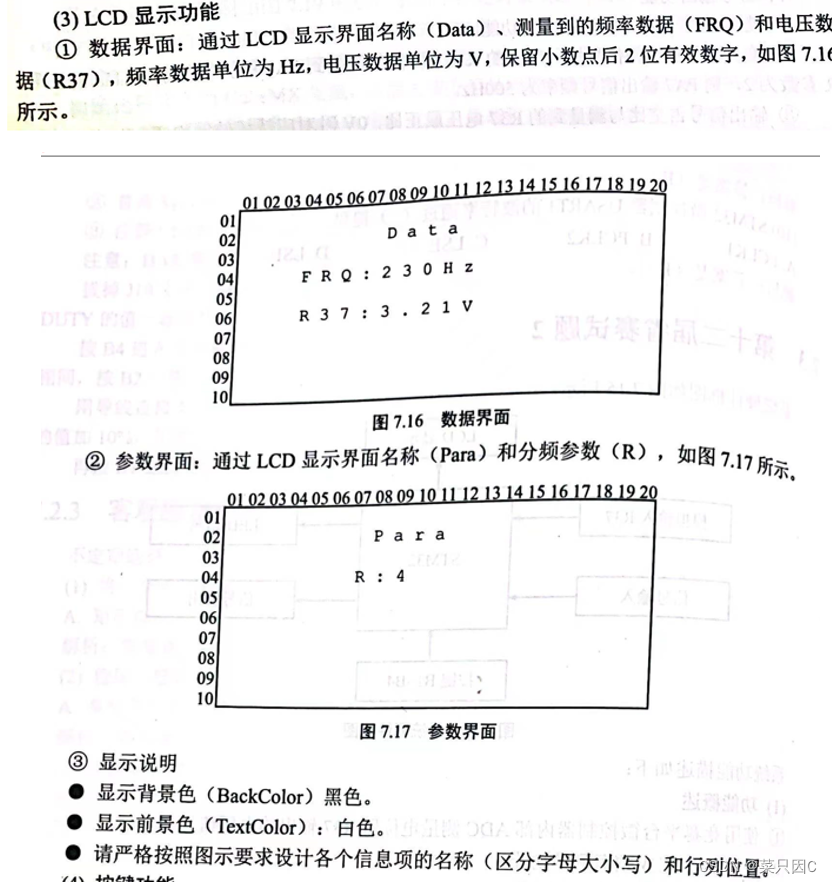

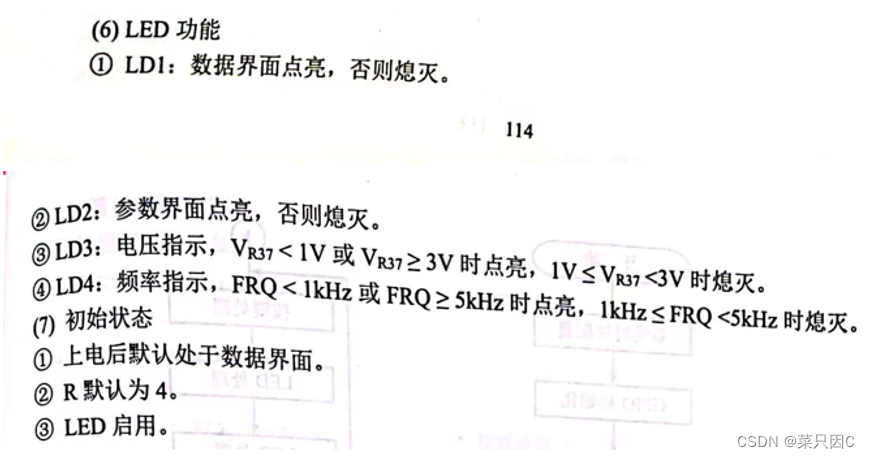
2 解析
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "tim.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "string.h"
#include "i2c_hal.h"
#include "lcd.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
int cnt1,cnt_down1,f1,cnt2,cnt_down2,f2;
double duty1,val[20],val_avg,duty2;
int num=1;
char buf1[20],buf2[20],buf3[20],buf4[20],buf5[20],buf6[20],buf7[20];
struct keys{
int step;
int state;
int cnt;
}key[5];
int R=4;
int sta;
int comp;
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void LCD_close()
{
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM2&&htim->Channel==HAL_TIM_ACTIVE_CHANNEL_2)//PA1测量外加信号频率和占空比
{
cnt1=HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_2);
cnt_down1=HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);
f1=80000000/cnt1;
duty1=(double)cnt_down1/(double)cnt1;
__HAL_TIM_SetCounter(&htim2,0);
}
if(htim->Instance==TIM3&&htim->Channel==HAL_TIM_ACTIVE_CHANNEL_2)//PA4测量PA7输出信号的频率和占空比
{
cnt2=HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2);
cnt_down2=HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1);
f2=1000000/cnt2;
duty2=(double)cnt_down2/(double)cnt2;
__HAL_TIM_SetCounter(&htim3,0);
}
}
void ADC()//电压采样(经过数据处理)
{
HAL_ADC_Start(&hadc2);
for(int i=0;i<20;i++)
{
val[i]=HAL_ADC_GetValue(&hadc2);
}
for(int i=0;i<20;i++)
{
for(int j=0;j<20;j++)
{
if(val[i]>val[j])
{
double temp=val[i];
val[i]=val[j];
val[j]=temp;
}
}
}
val_avg=0;
for(int i=5;i<15;i++)
{
val_avg+=val[i];
}
val_avg/=10;
//memset(val,0,sizeof(val));
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM1)//按键处理
{
key[1].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key[2].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key[3].state=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key[4].state=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
switch(key[1].step)
{
case 0:
{
if(key[1].state==GPIO_PIN_RESET)
{
key[1].step=1;
}
}
break;
case 1:
{
if(key[1].state==GPIO_PIN_RESET)
{
key[1].step=2;
}
else
{
key[1].step=0;
}
}
break;
case 2:
{
if(key[1].state==GPIO_PIN_SET)
{
key[1].step=0;
key[1].cnt++;
if(key[1].cnt%2==0) num=1;
else num=2;
}
}
break;
}
switch(key[2].step)
{
case 0:
{
if(key[2].state==GPIO_PIN_RESET)
{
key[2].step=1;
}
}
break;
case 1:
{
if(key[2].state==GPIO_PIN_RESET)
{
key[2].step=2;
}
else
{
key[2].step=0;
}
}
break;
case 2:
{
if(key[2].state==GPIO_PIN_SET)
{
key[2].step=0;
R+=2;
if(R==12) R=2;
}
}
break;
}
switch(key[3].step)
{
case 0:
{
if(key[3].state==GPIO_PIN_RESET)
{
key[3].step=1;
}
}
break;
case 1:
{
if(key[3].state==GPIO_PIN_RESET)
{
key[3].step=2;
}
else
{
key[3].step=0;
}
}
break;
case 2:
{
if(key[3].state==GPIO_PIN_SET)
{
key[3].step=0;
R-=2;
if(R==0) R=10;
}
}
break;
}
switch(key[4].step)
{
case 0:
{
if(key[4].state==GPIO_PIN_RESET)
{
key[4].step=1;
}
}
break;
case 1:
{
if(key[4].state==GPIO_PIN_RESET)
{
key[4].step=2;
}
else
{
key[4].step=0;
}
}
break;
case 2:
{
if(key[4].state==GPIO_PIN_SET)
{
key[4].step=0;
key[4].cnt++;
if(key[4].cnt%2==0)
{
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15,GPIO_PIN_SET);
sta=0;
}
if(key[4].cnt%2==1)
{
LCD_close();
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
sta=1;
}
}
}
break;
}
}
}
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC2_Init();
MX_TIM2_Init();
MX_TIM17_Init();
MX_TIM1_Init();
MX_TIM15_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
LCD_Init();
LCD_close();
LCD_Clear(White);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
sprintf(buf1," Data");
sprintf(buf4," Para");
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_2);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_2);
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_1);
HAL_TIM_Base_Start_IT(&htim1);
HAL_TIM_PWM_Start(&htim17,TIM_CHANNEL_1);//外加产生PWM
HAL_TIM_PWM_Start(&htim15,TIM_CHANNEL_2);//PA7输出PWM
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
ADC();
comp=1000*val_avg/4096;
__HAL_TIM_PRESCALER(&htim17,80000 * R / f1);
__HAL_TIM_SetCounter(&htim17,0);
__HAL_TIM_SetCompare(&htim17,TIM_CHANNEL_1,comp);
sprintf(buf3," R37:%.2lfV",val_avg*3.3/4096);
sprintf(buf2," FRQ:%dHz",f1);
sprintf(buf5," R:%d",R);
sprintf(buf6," PA7:%dHz",f2);
sprintf(buf7," duty:%.4lf",duty2);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
if(num==1)
{
LCD_Clear(Black);
LCD_DisplayStringLine(Line1,(uint8_t*)buf1);
LCD_DisplayStringLine(Line3,(uint8_t*)buf2);
LCD_DisplayStringLine(Line5,(uint8_t*)buf3);
LCD_DisplayStringLine(Line7,(uint8_t*)buf6);
LCD_DisplayStringLine(Line9,(uint8_t*)buf7);
if(sta==0)
{
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_9,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
}
if(num==2)
{
LCD_Clear(Black);
LCD_DisplayStringLine(Line1,(uint8_t*)buf4);
LCD_DisplayStringLine(Line3,(uint8_t*)buf5);
if(sta==0)
{
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_9,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
}
if(val_avg*3.3/4096>=3||val_avg*3.3/4096<1)
{
if(sta==0)
{
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_10,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
}
else
{
if(sta==0)
{
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_10,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
}
if(f1>=5000||f1<1000)
{
if(sta==0)
{
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_11,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
}
else
{
if(sta==0)
{
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_11,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
}
HAL_Delay(300);
}
/* USER CODE END 3 */
}







 本文介绍了在STM32平台上,通过ADC进行电压采样并利用TIM模块测量信号频率和占空比,同时实现按键控制和LCD显示功能的嵌入式系统设计。
本文介绍了在STM32平台上,通过ADC进行电压采样并利用TIM模块测量信号频率和占空比,同时实现按键控制和LCD显示功能的嵌入式系统设计。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











