






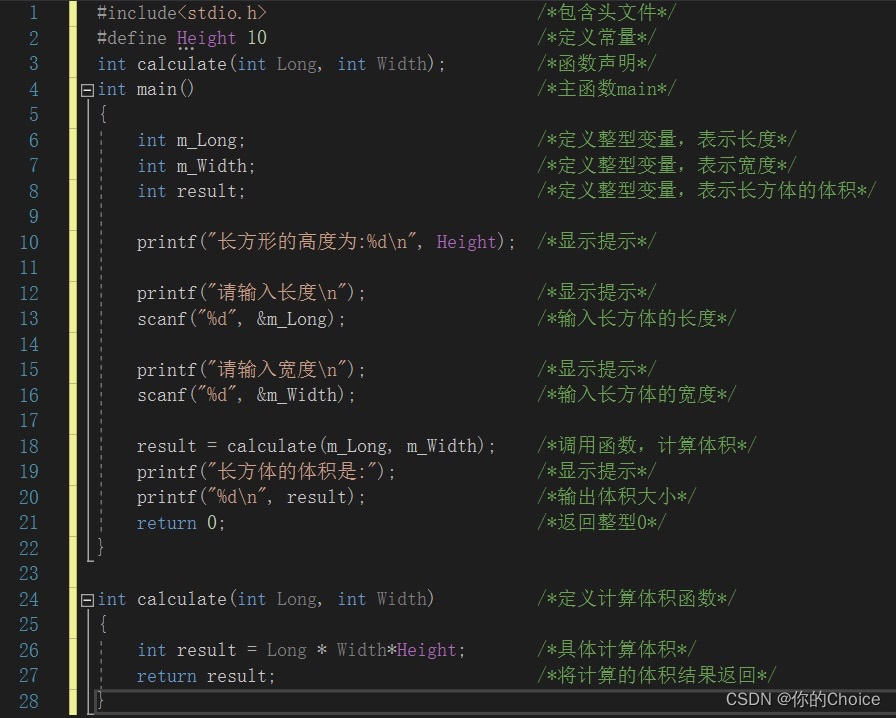
实现功能:有一个长方体,它的高已经给出,然后输入这个长方体的长和宽,通过输入的长、宽以及给定的高度,计算出长方体的体积。
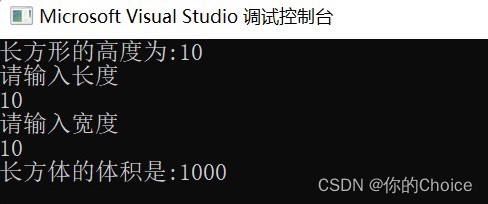
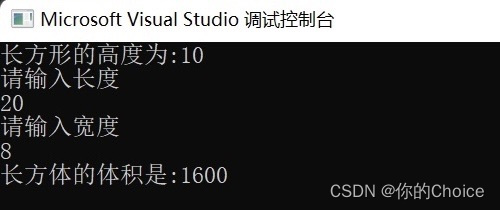
运行程序,显示效果如图:
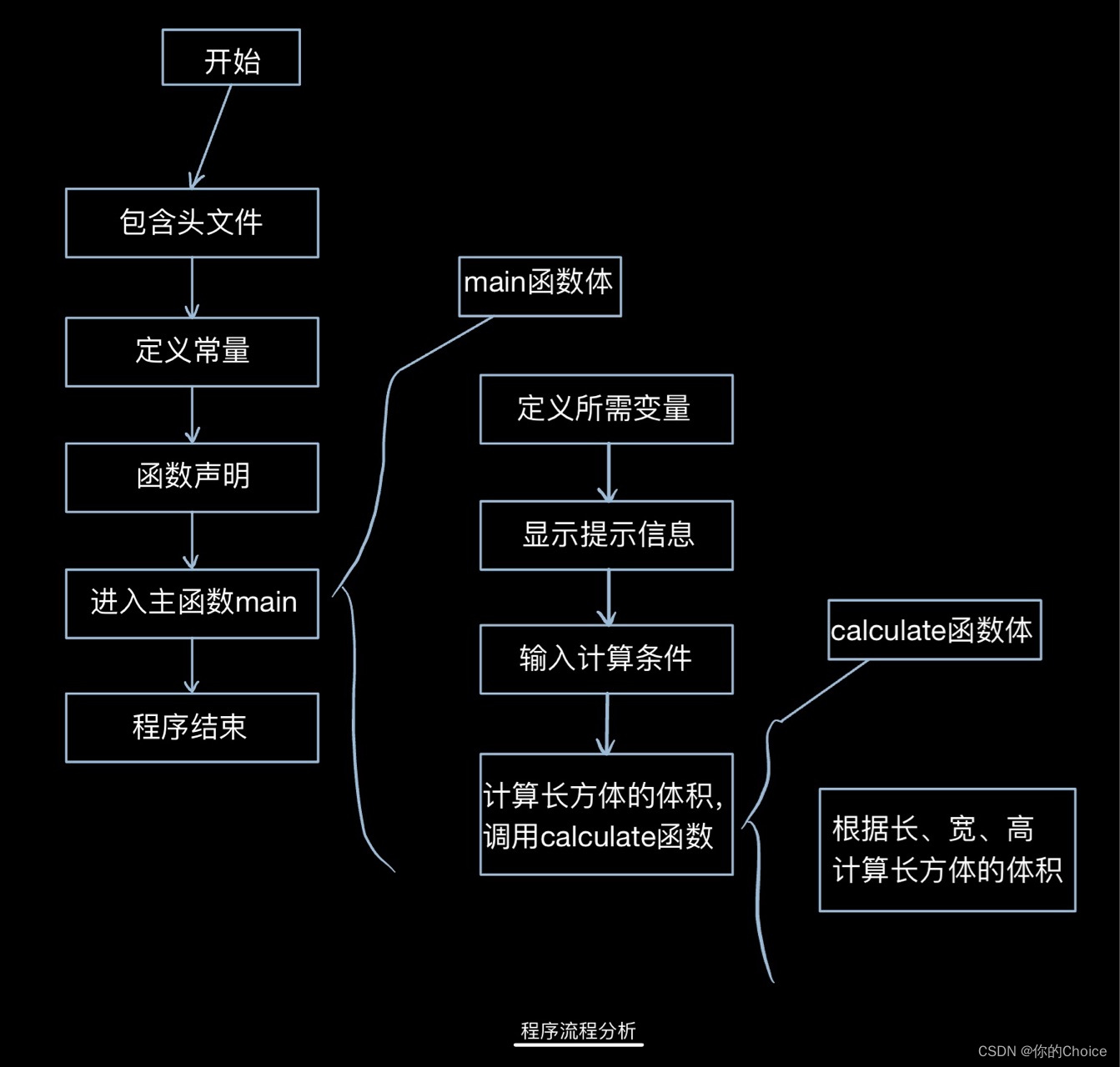
在具体讲解这个程序的执行过程之前,先展现该程序的过程图:
1、定义常量
实例代码中的第2行:
#define Height 10

使用#define定义一个符号。#define在这里的功能是设定这个符号为Height,并且指定这个符号Height代表的值为10。这样在程序中,只要是使用Height这个标识符的位置,就代表使用的是10这个数值。
2、函数声明
实例代码中的第3行:
int calculate(int Long,int Width);

此处代码的作用是对一个函数进行声明。如果此处声明calculate函数, 那么在程序代码的后面会有calculate函数的具体定义内容,这样程序中如果出现calculate函数,程序就会根据calculate函数的定义执行有关的操作。
3、定义变量
实例代码中的第6~8行:

这3行语句都是定义变量的语句。在C语言中要使用变量,必须在使用变量之前进行定义,之后编译器会根据变量的类型为变量分配内存空间。变量的作用就是存储数值,用变量进行计算。
4、输入语句
实例代码中的第13行:
scanf("%d",&m_Long);

在C语言中,scanf函数就用来接收键盘输入的内容,并将输入的内容保存在相应的变量中。可以看到,在scanf函数的参数中,m_Long就是之前定义的整型变量,它的作用是存储输入的信息内容。其中的“&”符号是取地址运算符。
5、数学运算语句
实例代码中的第26行:
int result=Long*Width*Height;

这行代码在calculate函数体内,其功能是将变量Long、Width、Height三者相乘得到的结果保存在result变量中。其中的“*”号代表乘法运算符。
6、总结
(1)包含程序所需要的头文件。
(2)定义一个常量Height,其代表的值为10。
(3)对calculate函数进行声明。
(4)进入main函数,程序开始执行。
(5)在main函数中,首先定义3个整型变量,分别代表长方体的长度、宽度和体积。
(6)显示提示文字,然后根据显示的文字输入有关的数据。
(7)当长方体的长度和宽度都输入之后,会调用calculate函数,计算长方体的体积。
(8)定义calculate函数的位置在main函数的下面,在calculate函数体内将计算长方体体积的结果进行返回。
(9)在main函数中,result变量得到了calculate函数返回的结果。
(10)通过输出语句将其中长方体的体积显示出来。
(11)程序结束。















 7872
7872











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









