







参考文献:Mirjalili, Seyedali eta. 2017. 《Salp Swarm Algorithm: A Bio-Inspired Optimizer for Engineering Design Problems》. Advances in Engineering Software 114: 163–91.
摘要
本文针对单目标和多目标优化问题,提出了两种新的优化算法- -稀疏粒子群算法( SSA )和多目标稀疏粒子群算法( MSSA )。SSA和MSSA的主要灵感是大黄鱼在海洋中航行和觅食时的群集行为。这两个算法在几个数学优化函数上进行测试,以观察和确认它们在寻找优化问题的最优解方面的有效行为。在数学函数上的结果表明,SSA算法能够有效地改善初始随机解并收敛到最优解。MSSA结果表明,该算法能够以较高的收敛性和覆盖率逼近Pareto最优解。本文还考虑了使用SSA和MSSA求解几个具有挑战性且计算量大的工程设计问题(例如翼型设计和船用螺旋桨设计等)。实际案例研究的结果证明了所提出的算法在解决具有困难和未知搜索空间的实际问题中的优点。
为了对salp链进行数学建模,首先将种群分为领导者和跟随者两组。领导者是链的前端,而其余部分被认为是追随者。正如这些Salps的名字所暗示的那样,领导者引导群体,跟随者相互跟随(以及间接的直接领导者)。与其他基于群体的技术类似,在n维搜索空间中定义了Salps的位置,其中n是给定问题的变量数。因此,所有樽海鞘的位置存储在一个称为x的二维矩阵中。同时假设搜索空间中存在一个名为F的食物源作为樽海鞘群的目标。
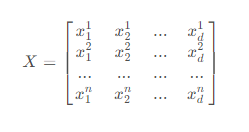
为了更新领导者的位置,提出了如下方程:

其中x1j表示第j维中第1个salp ( leader )的位置,Fj表示第j维中食物源的位置,ubj表示第j维的上界,lbj表示第j维的下界,c1,c2,c3为随机数。
上式表明领导者只更新其关于食物来源的位置。系数c1是SSA中最重要的参数,因为它平衡了勘探和开采,定义如下:
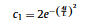
其中l为当前迭代次数,L为最大迭代次数。
参数c2和c3是在[ 0 , 1]区间内均匀生成的随机数。事实上,他们决定了第j维的下一个位置是朝向正无穷大还是负无穷大以及步长。
为了更新跟随者的位置,使用以下方程(牛顿运动定律):
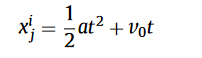
若i≥2,xij表示第i个跟随者salp在第j维的位置,t为时间,v0为初始速度,a = v最终v0其中v = x-x0t .因为优化的时间是迭代,所以迭代之间的偏差等于1,考虑到v0 = 0,该方程可以表示为:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











