







提到路径问题,我们的第一反应是用搜索,也就是bfs或者dfs来做,但是有些情况,我们可以直接用动态规划来解决,因为当前点的结果和当前点的状态,也就是坐标有关,并且当前点的结果取决于它的上一步位置在哪,也就是状态转移。
目录
一、知识点(易混淆)
首先,我们要弄清楚一个误区, 什么样的路径问题可以用dp来解决?
动态规划需要满足的条件如下:
其中,无后效性是一个必要条件,如果不满足,用动态规划是无法解决的
那么无后效性在路径问题中体现在哪呢?
以迷宫或者走格子问题为例:
如果我们规定了从起点到终点只能向右走或者向下走,那么它是满足无后效性的;
但是如果我们规定从起点到终点4个方向都可以走,那么它是不满足的
为什么呢?
首先,我们要弄清楚无后效性的定义是什么
无后效性有两层含义,第一层含义是,在推导后面阶段的状态的时候,我们只关心前面阶段的状态值,不关心这个状态是怎么一步一步推导出来的。第二层含义是,某阶段状态一旦确定,就不受之后阶段的决策影响
我们也可以理解为一个状态的值一旦确定下来了,那么后面的状态不管怎么变,都不会影响它,通俗来说就是,后面的状态只能取前面的状态进行计算,但是不能改变它,只读不写
回到路径问题,大方向我们可以看作有2个:横轴和纵轴
如果规定了从起点到终点只能向右走或者向下走,那么横轴和纵轴的行进始终是单箭头的,不存在一个状态确定了以后还可能由后续状态回溯回来的问题,所以它是满足无后效性的
无后效性保证了dp的代码可以正确推进,比如拿用迭代(循环)来解决dp问题来说:
我们用i,j分别表示横轴和纵轴,那么横轴和纵轴的行进始终是单箭头的,那么我们就可以用双重循环来解决,因为i,j始终是单方向推进的
但是如果我们规定从起点到终点4个方向都可以走,那么横轴和纵轴的行进都是双箭头的
比如(i,j),它可以由i-1,i+1,j-1,j+1四个方向得到
我们无法用循环来解决,因为我们用循环的时候一个点只会访问一次,i,j始终是变大的,这就会导致有些点的更新错误
因为4个方向的话:明明一个状态确定了以后还可能由后续状态回溯回来,但是在用双重循环时,每个点只给了它一次更新的机会
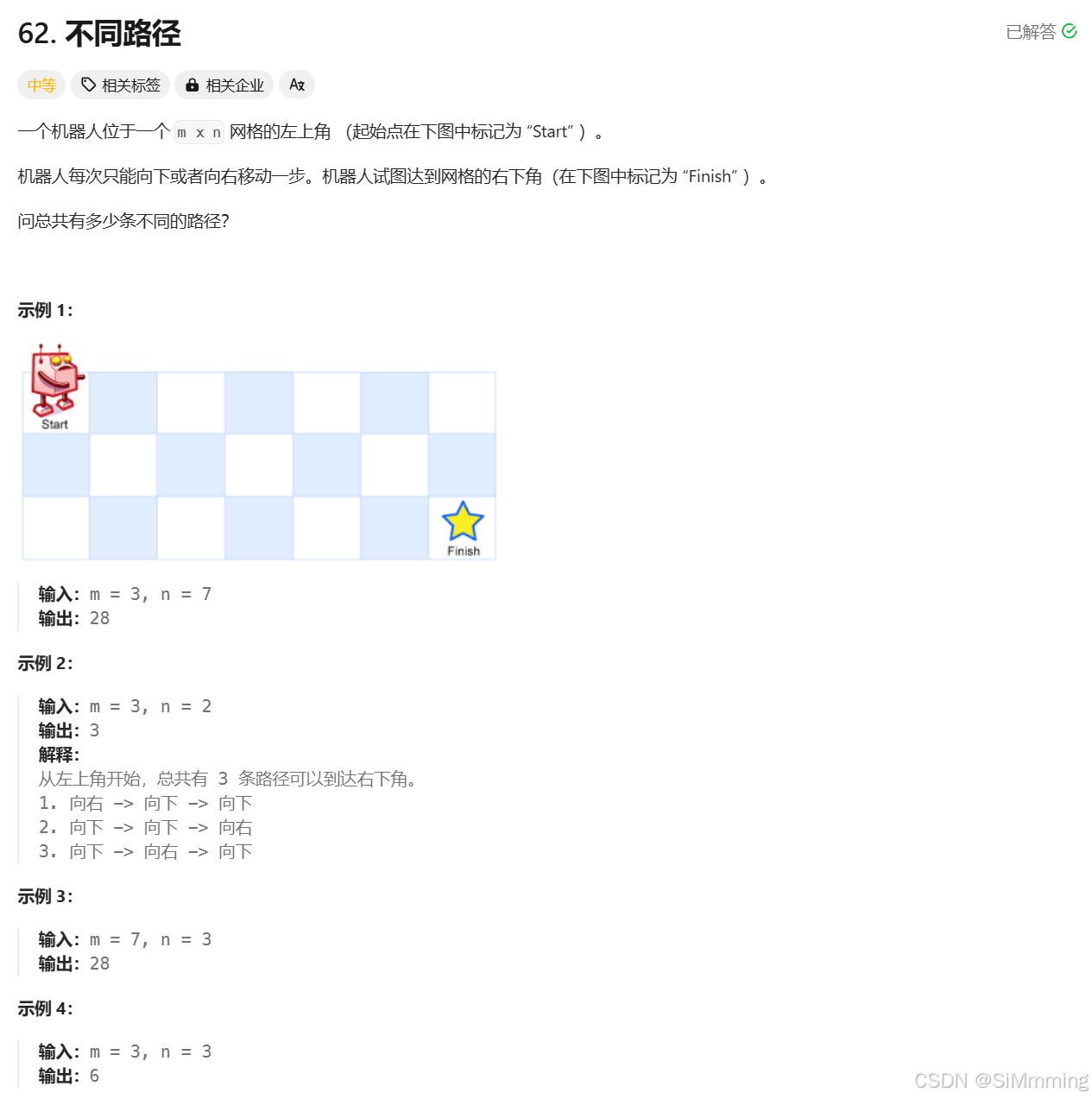
二、不同路径Ⅰ
代码
class Solution {
public:
int uniquePaths(int m, int n) {
//当前路径数取决于当前所处的状态
int dp[110][110];
//初始化边界,左边界和上边界的路径只可能为1
for(int i=0;i<m;i++) dp[i][0]=1;
for(int j=0;j<n;j++) dp[0][j]=1;
for(int i=1;i<m;i++)
{
for(int j=1;j<n;j++)
{
dp[i][j]=dp[i-1][j]+dp[i][j-1];//由上面或者左边得到
}
}
return dp[m-1][n-1];//0,0是起点
}
};注意
dp的题目一定要注意边界条件问题,这个题的左边界和上边界的状态只能有唯一路径,左边界只有可能由上面走来,上边界只有可能由左边走来,所以路径数为1
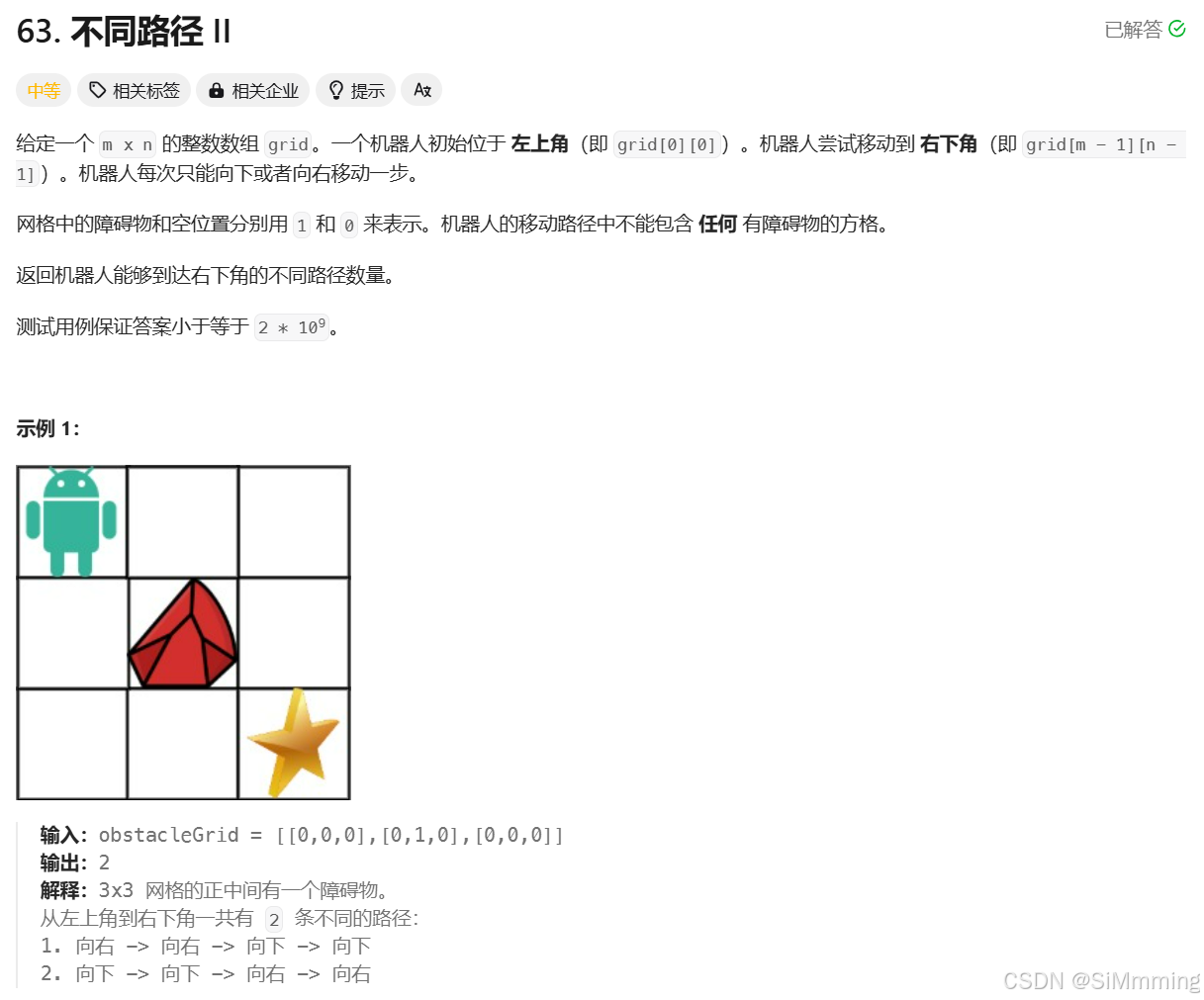
三、 不同路径Ⅱ
代码
class Solution {
public:
int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {
//要做一遍路径筛选,不能由1的位置得来
int m=obstacleGrid.size();
int n=obstacleGrid[0].size();
//注意:起点或终点不可达的情况
if(obstacleGrid[0][0]==1||obstacleGrid[m-1][n-1]==1) return 0;
vector<vector<int>> dp(m,vector<int>(n,0));
dp[0][0]=1;
//注意:上边界或左边界包含障碍物的问题
for(int i=1;i<m;i++)
{
//当前非障碍物,取决于上一个点的状态
if(obstacleGrid[i][0]==0) dp[i][0]=dp[i-1][0];
//是障碍物,不可达
else dp[i][0]=0;
}
for(int j=1;j<n;j++)
{
//当前非障碍物,取决于上一个点的状态
if(obstacleGrid[0][j]==0) dp[0][j]=dp[0][j-1];
//是障碍物,不可达
else dp[0][j]=0;
}
for(int i=1;i<m;i++)
{
for(int j=1;j<n;j++)
{
//非障碍物可通行
if(obstacleGrid[i-1][j]==0) dp[i][j]+=dp[i-1][j];
if(obstacleGrid[i][j-1]==0) dp[i][j]+=dp[i][j-1];
}
}
return dp[m-1][n-1];
}
};注意:
1. 坑点1:终点不可达或者起点本身就不可达问题
不要默认终点一定可达,起点一定合法,所以先要做一个预处理
2. 坑点2:上边界或下边界包含障碍物的问题
在不同路径1.0版本中,不包含障碍物,所以左边界和上边界的值直接设为1即可,但是这道题要注意是否可达,如果出现了1,则不可达,并且它后面的点都将不可达

















 2304
2304

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









