






介绍
1、典型工作用电压:5V
2、超小静态工作电流:小于 5mA
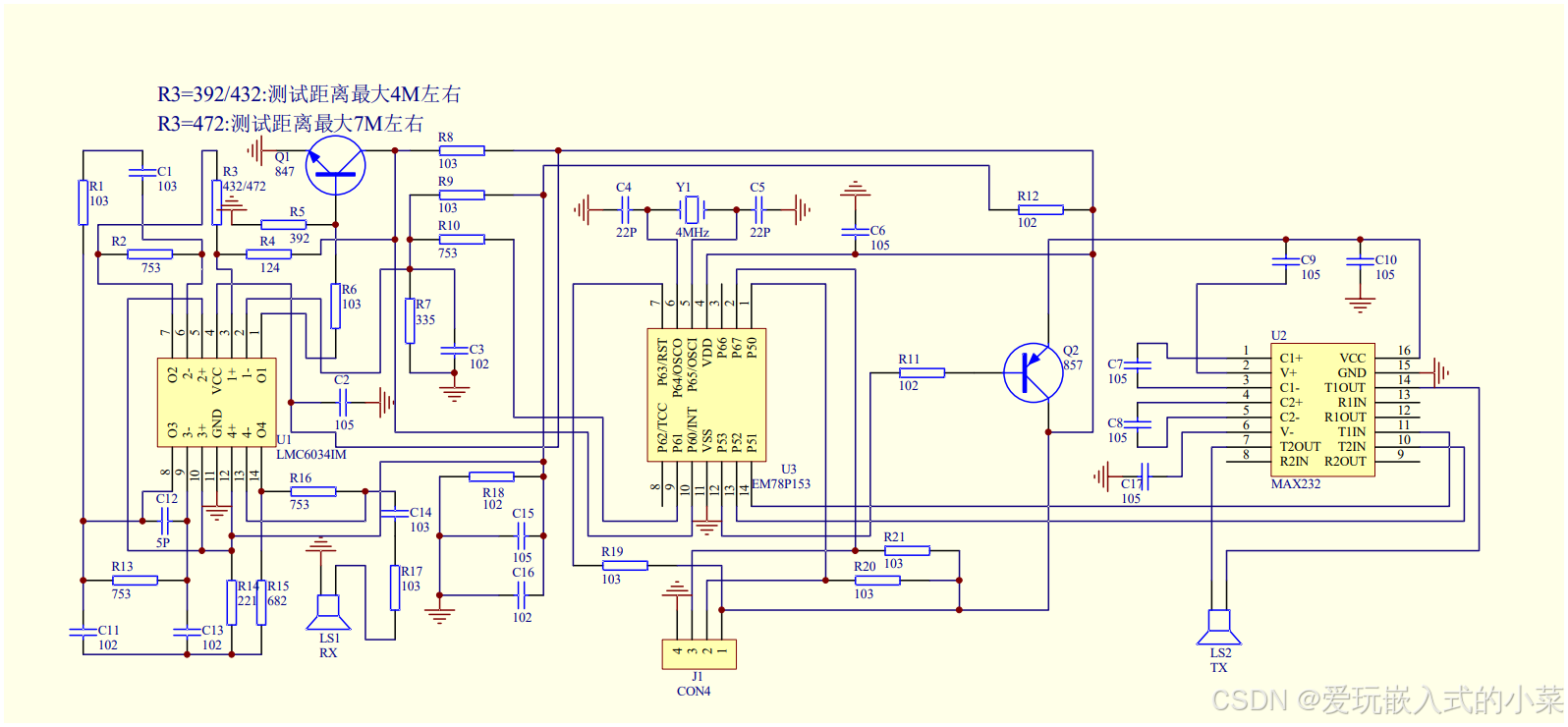
3、感应角度(R3 电阻越大,增益越高,探测角度越大): R3 电阻为 392,不大于 15 度 R3 电阻为 472, 不大于 30 度
4、探测距离(R3 电阻可调节增益,即调节探测距离): R3 电阻为 392 2cm-450cm R3 电阻为 472 2cm-700cm
5、高精度:可达 0.3cm 6、盲区(2cm)超近
图文介绍
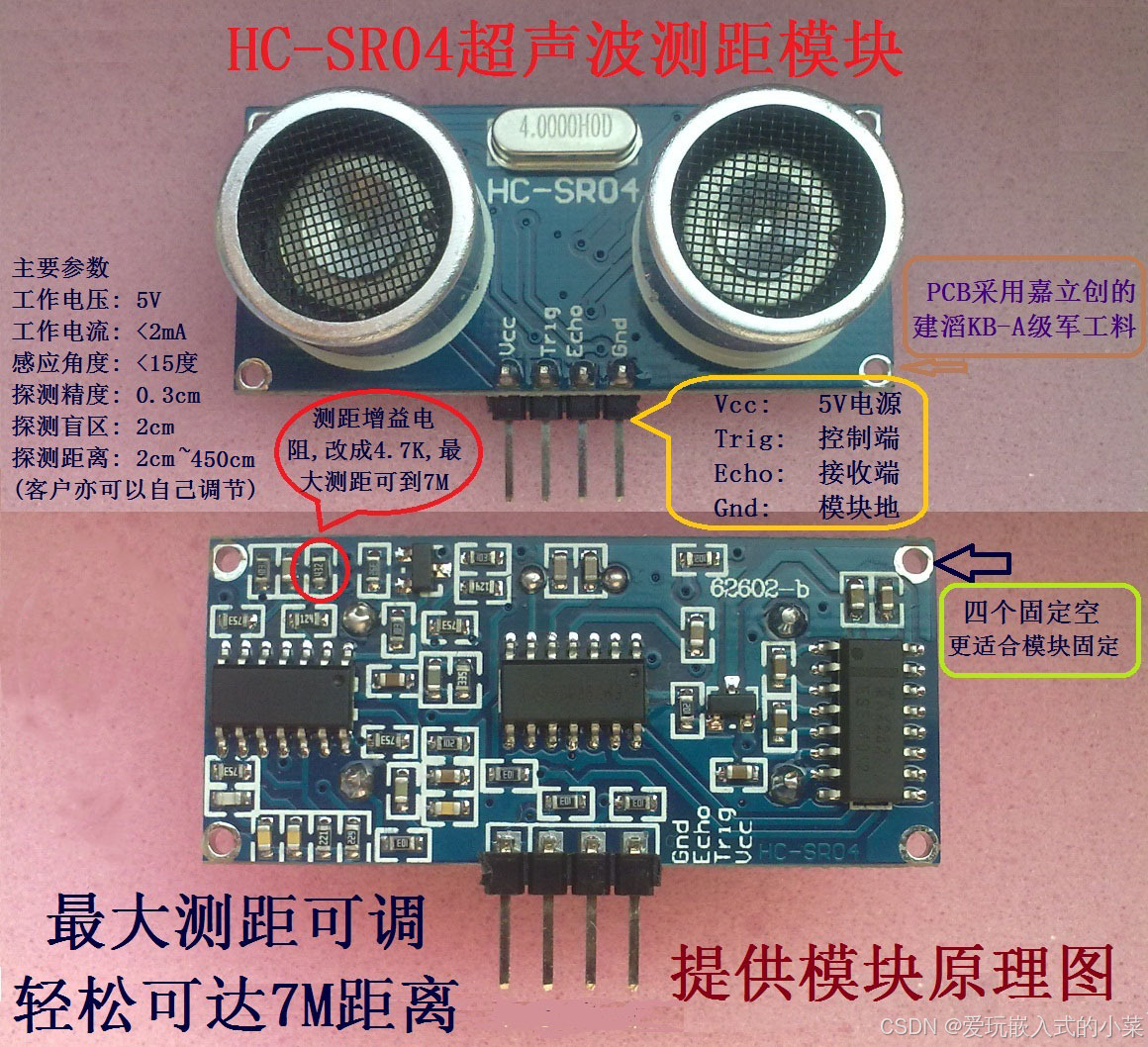
接口定义:
Vcc、 Trig(控制端)、 Echo(接收端)、 Gnd
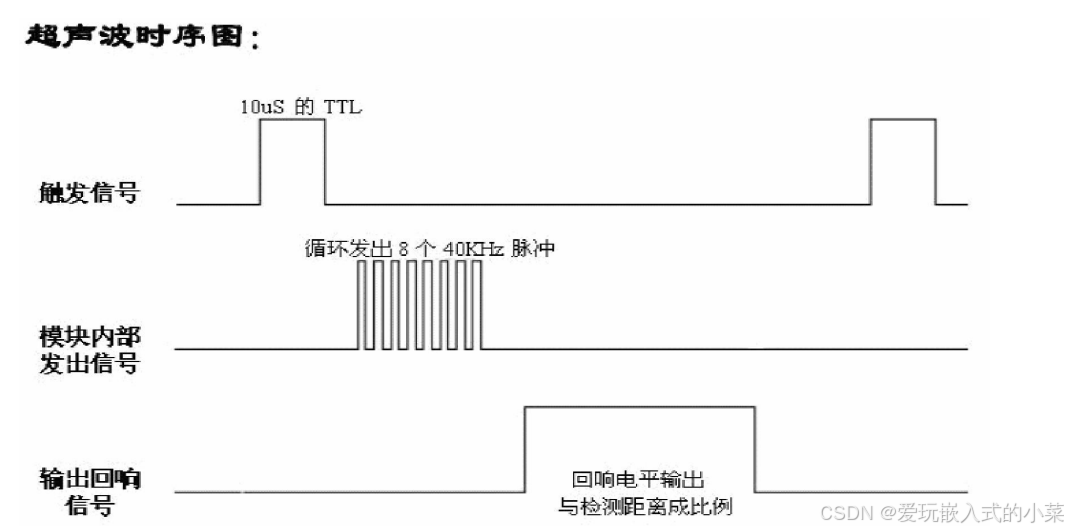
使用方法:控制口Trig发一个 10US 以上的高电平,就可以在接收口等待高电平输出. 一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测 距的时间,方可算出距离.如此不断的周期测,就可以达到你移动测量的值了。
模块工作原理:
(1)采用 IO 触发测距,给至少 10us 的高电平信号;
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
(3)有信号返回,通过 IO 输出一高电平,高电平持续的时间就是
(4)超声波从发射到返回的时间.测试距离=(高电平时间*声速(340M/S))/2;
Trig连接你设置的GPIO,我这里是GPIOB PIn 0,示例代码(我这里给20us)
就是GPIOB PIn 0向Trig发送20us的方波,然后Echo接另一个GPIO来接受反馈
void HSCR_04_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
void SET_GPIOBpin0(void)
{
GPIO_SetBits(GPIOB, GPIO_Pin_0);
Delay_us(20);
GPIO_ResetBits(GPIOB, GPIO_Pin_0);
}
应用注意事项:
1:此模块不宜带电连接,如果要带电连接,则先让模块的 Gnd 端先连接。否则会影响 模块工作。
2:测距时,被测物体的面积不少于 0.5 平方米且要尽量平整。否则会影响测试结果
附原理图:

















 2849
2849

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









