






KinectV2+机械臂实现目标抓取上位机和下位机软件。
上位机软件通过vs2019+qt5通过C++语言编写。
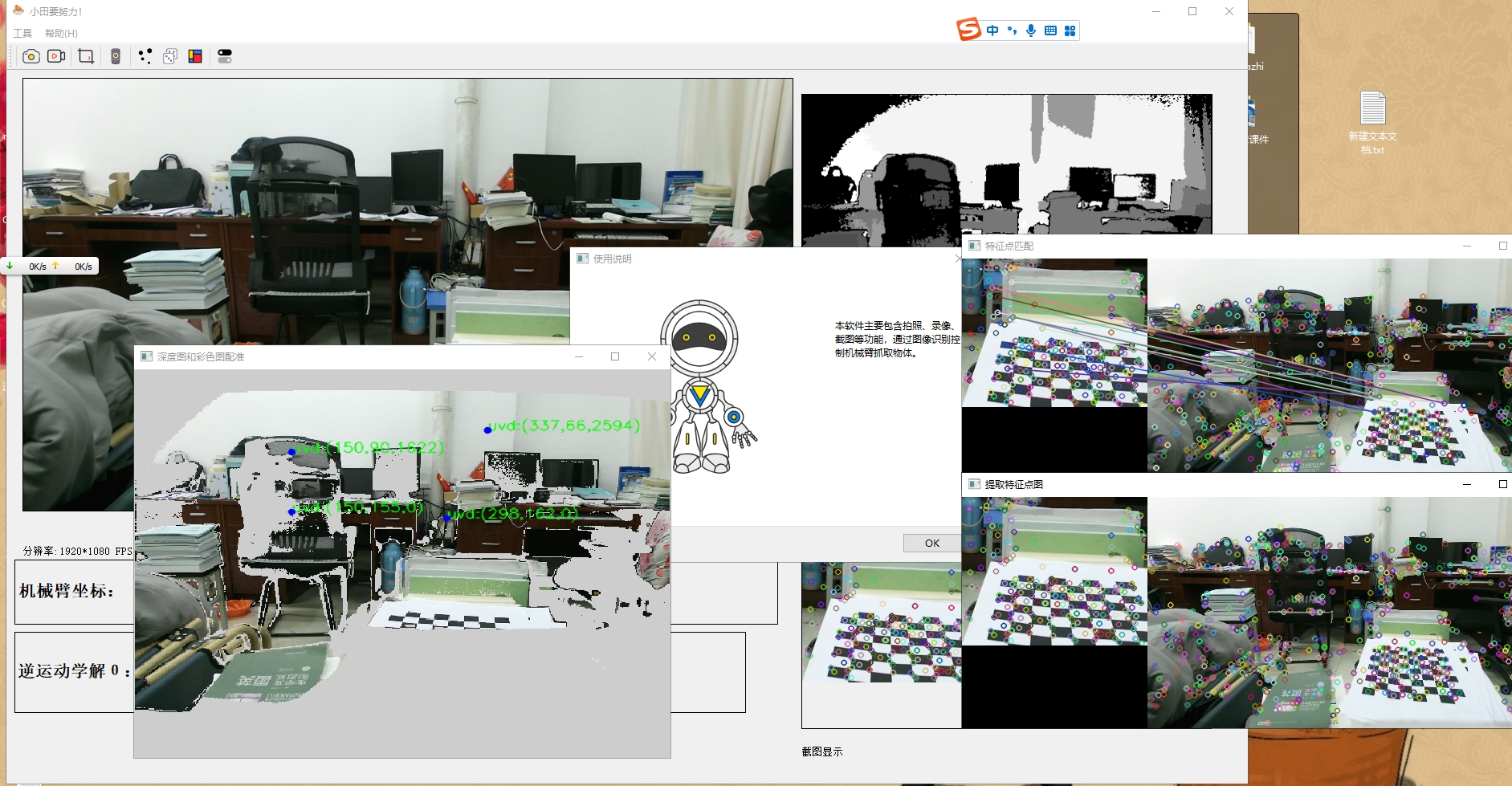
上夜机运行特征点检测算法,获取目标图像,图像配准,目标位置计算,相机内参和手眼标定数据结果,逆运动学求解,串口通信。
以上内容和算法均可以自行修改。
下位机通过stm32接收上位机逆解结果控制机械臂抓取。
ID:25500676311201029
l爱音悦
KinectV2+机械臂实现目标抓取上位机和下位机软件
摘要:
本文介绍了一种基于KinectV2和机械臂的目标抓取系统的设计与实现。上位机软件通过使用vs2019和qt5的C++语言编写,运行了特征点检测算法,实现了获取目标图像、图像配准、目标位置计算、相机内参和手眼标定数据结果以及逆运动学求解等功能,同时还通过串口通信将结果传输给下位机。下位机则通过stm32接收上位机传输的逆解结果,并控制机械臂实现对目标的抓取。本文的方法具有灵活性,各部分算法可以根据需要进行修改和优化。
-
引言
目标抓取是机器人领域中的重要应用之一。在现实生活中,很多场景都需要机器人能够准确地抓取目标物体,如工业生产、仓储物流、医疗护理等。本文的目标是基于KinectV2和机械臂实现一个目标抓取系统,并介绍了上位机和下位机的软件设计。 -
上位机软件设计
上位机软件是整个系统的核心部分,它负责图像处理和运算,通过与KinectV2相连获取目标图像,进行图像配准、目标位置计算等操作。上位机软件使用vs2019和qt5的C++语言编写,具有良好的跨平台性和易用性。
2.1 特征点检测算法
为了获取目标图像中的特征点,本文采用了一种特征点检测算法。该算法基于图像处理技术,可以在图像中准确地检测出目标物体的特征点,为后续的图像配准和目标位置计算提供准确的数据。
2.2 图像配准和目标位置计算
在获取到目标图像和参考图像之后,上位机软件需要对它们进行配准,以确定目标物体在图像中的位置。本文采用了一种基于特征点匹配的配准算法,通过对目标图像和参考图像中的特征点进行匹配,得到它们之间的关系,并计算出目标物体的位置。
2.3 相机内参和手眼标定数据结果
相机内参和手眼标定是目标抓取系统中非常重要的两个参数,它们决定了系统的精度和稳定性。本文通过对KinectV2相机进行标定,得到了相机的内参数据,并结合机械臂的手眼标定数据,提高了系统的准确性。
2.4 逆运动学求解
在确定了目标物体在图像中的位置之后,上位机软件需要将其转化为机械臂的运动控制命令,以实现对目标的抓取。本文采用了逆运动学求解的方法,通过计算机械臂的关节角度,确定机械臂的姿态,从而实现对目标的准确抓取。
2.5 串口通信
为了将上位机软件的计算结果传输给下位机,本文使用了串口通信。上位机通过串口将逆解结果发送给下位机,下位机接收到结果后,根据控制算法控制机械臂的运动,实现对目标的抓取。
-
下位机软件设计
下位机软件是整个系统的实际执行部分,它负责接收上位机传输的逆解结果,并控制机械臂实现对目标的抓取。本文采用了stm32作为下位机的控制器,通过接收上位机传输的逆解结果,控制机械臂的舵机进行相应的运动。 -
实验结果与分析
本文在实际系统中进行了测试,通过对不同形状、大小和位置的目标进行抓取,验证了系统的可靠性和稳定性。实验结果表明,本文设计的目标抓取系统可以准确地抓取目标物体,并具有较高的抓取成功率。 -
结论
本文基于KinectV2和机械臂实现了一个目标抓取系统,并介绍了上位机和下位机的软件设计。通过实验证明,该系统具有较高的准确性和稳定性,可以在实际应用中发挥重要作用。本文的方法具有良好的可扩展性和灵活性,各部分算法可以根据需要进行修改和优化。
相关的代码,程序地址如下:http://matup.cn/676311201029.html
















 622
622











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









