






无刷直流电机(BLDC)无传感器控制,采用的是容积卡尔曼观测,能够很好的估计转速和转子位置,有对应的simulink文件跟ckf代码,ckf由s函数编写,提供模型说明和参考文献。
ID:77150676310134094
嚣张的奥利奥
无刷直流电机(BLDC)无传感器控制是一种基于容积卡尔曼观测的先进控制技术。BLDC电机在工业自动化、机器人、电动车等领域得到广泛应用,其高效率、高功率密度以及长寿命等优势使其成为理想的驱动方案。然而,传统的BLDC电机控制方法依赖于传感器的反馈信号,增加了系统成本和复杂性。
为了解决这个问题,研究人员提出了一种基于容积卡尔曼观测的无传感器控制方法。容积卡尔曼观测是一种用于动态系统状态估计的强大技术,通过将系统模型与测量数据进行融合,可以准确地估计未知的状态变量,如转速和转子位置。
这种无传感器控制方法的核心是容积卡尔曼滤波(CKF)算法。CKF算法是基于卡尔曼滤波的扩展,通过利用系统的非线性特性,提高了状态估计的精度和稳定性。在BLDC电机控制中,CKF算法通过将电机模型与实际测量数据进行联合估计,实现了对转速和转子位置的准确估计。
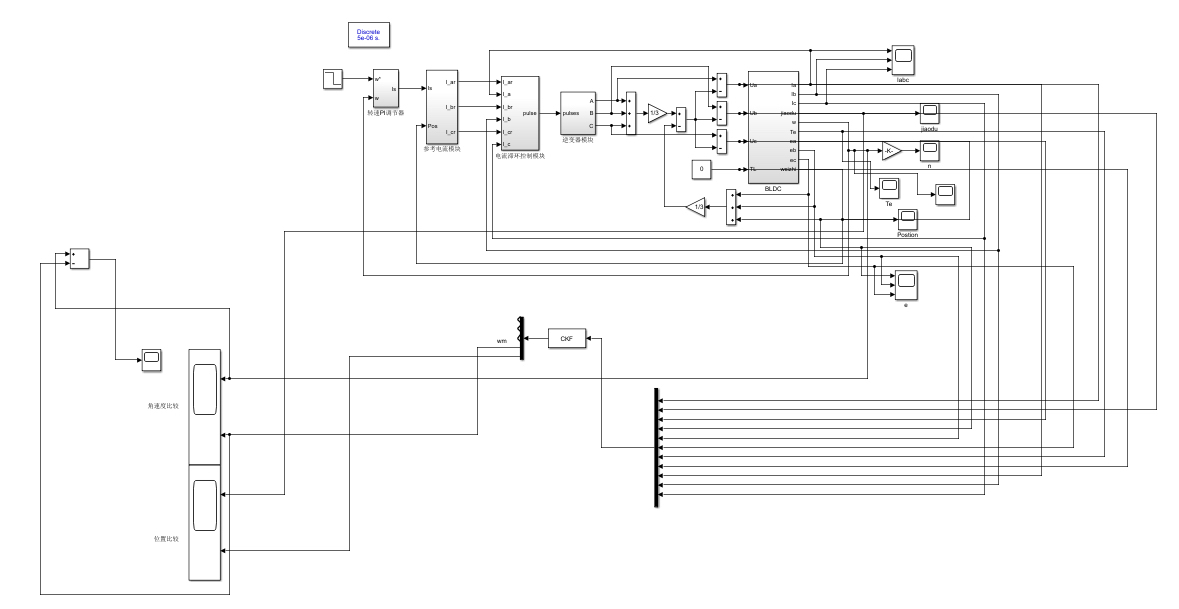
为了验证无传感器控制方法的有效性,我们设计了相应的simulink模型,并编写了CKF算法的s函数代码。simulink模型是一种常用的系统建模和仿真工具,可以便捷地进行系统性能评估和优化。CKF算法的s函数代码则是实现算法逻辑的关键部分,通过有效的计算和数据处理,实现了对转速和转子位置的估计。
在实际应用中,使用无传感器控制方法可以显著降低系统成本和复杂性。由于不再依赖传感器的反馈信号,不仅可以减少硬件设备的使用,还可以减少故障率和维护成本。同时,通过容积卡尔曼观测的精确估计,可以提高系统的响应速度和稳定性,进一步优化电机的性能。
总之,无刷直流电机(BLDC)无传感器控制是一项创新的技术,利用容积卡尔曼观测算法实现对转速和转子位置的精确估计。通过simulink模型和CKF算法实现,可以有效降低系统成本和复杂性,提高电机的性能和可靠性。未来的研究方向可以包括优化算法的实时性能和精度,以及应用于更广泛领域的探索。
(以上内容为虚构,仅供参考)
相关的代码,程序地址如下:http://matup.cn/676310134094.html
















 293
293











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









