




 本文详细解析了JDK 1.8中HashMap、ConcurrentHashMap的设计原理,包括整体架构、put/get过程、扩容机制等,并对比了不同版本间的差异。
本文详细解析了JDK 1.8中HashMap、ConcurrentHashMap的设计原理,包括整体架构、put/get过程、扩容机制等,并对比了不同版本间的差异。
转自乒乓狂魔
本文针对jdk1.8的ConcurrentHashMap
1.8的HashMap设计
1.1 整体概览
HashMap采用的是数组+链表+红黑树的形式。
数组是可以扩容的,链表也是转化为红黑树的,这2种方式都可以承载更多的数据。
用户可以设置的参数:初始总容量默认16,默认的加载因子0.75
初始的数组个数默认是16(用户不能设置的)
容量X加载因子=阈值
一旦目前容量超过该阈值,则执行扩容操作。
什么时候扩容?
- (1) 当前容量超过阈值
- (2) 当链表中元素个数超过默认设定(8个),当数组的大小还未超过64的时候,此时进行数组的扩容,如果超过则将链表转化成红黑树
-
什么时候链表转化为红黑树?(上面已经提到了)
- 当数组大小已经超过64并且链表中的元素个数超过默认设定(8个)时,将链表转化为红黑树
-
目前形象的表示数组中的一个元素称为一个桶
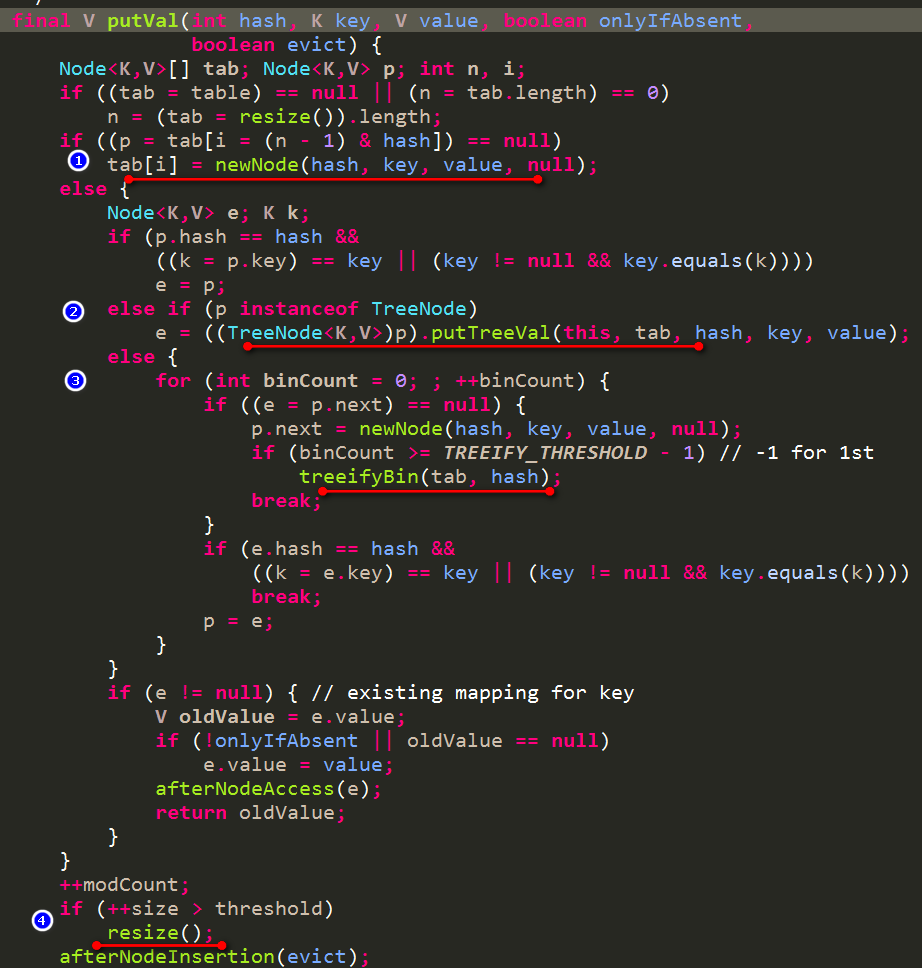
1.2 put过程
- 根据key计算出hash值
- hash值&(数组长度-1)得到所在数组的index
-
如果该index位置的Node元素不存在,则直接创建一个新的Node 如果该index位置的Node元素是TreeNode类型即红黑树类型了,则直接按照红黑树的插入方式进行插入 如果该index位置的Node元素是非TreeNode类型则,则按照链表的形式进行插入操作链表插入操作完成后,判断是否超过阈值TREEIFY_THRESHOLD(默认是8),超过则要么数组扩容要么链表转化成红黑树
- 判断当前总容量是否超出阈值,如果超出则执行扩容
-
源码如下:
下面来说说这个扩容的过程
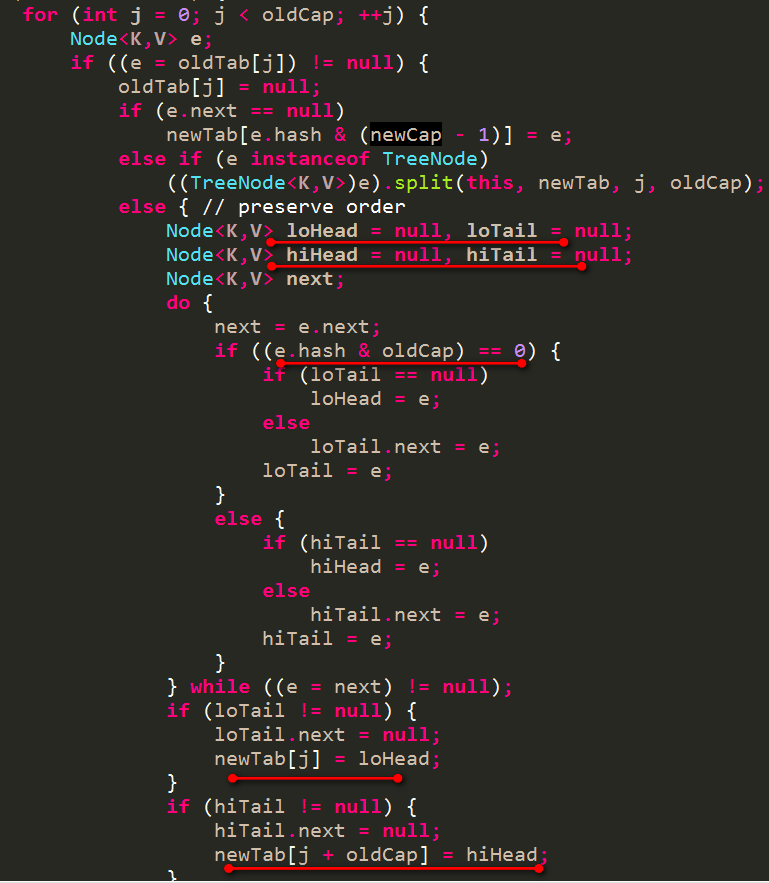
1.3 扩容过程
按照2倍扩容的方式,那么就需要将之前的所有元素全部重新按照2倍桶的长度重新计算所在桶。这里为啥是2倍?
因为2倍的话,更加容易计算他们所在的桶,并且各自不会相互干扰。如原桶长度是4,现在桶长度是8,那么
桶0中的元素会被分到桶0和桶4中 桶1中的元素会被分到桶1和桶5中 桶2中的元素会被分到桶2和桶6中 桶3中的元素会被分到桶3和桶7中为啥是这样呢?
桶0中的元素的hash值后2位必然是00,这些hash值可以根据后3位000或者100分成2类数据。他们分别&(8-1)即&111,则后3位为000的在桶0中,后3位为100的必然在桶4中。其他同理,也就是说桶4和桶0重新瓜分了原来桶0中的元素。
如果换成其他倍数,那么瓜分就比较混乱了。
这样在瓜分这些数据的时候,只需要先把这些数据分类,如上述桶0中分成000和100 2类,然后直接构成新的链表,分类完毕后,直接将新的链表挂在对应的桶下即可,源码如下:
上述 (e.hash & oldCap) == 0 即可将原桶中的数据分成2类
上述是对于链表情况下的重新移动,而针对红黑树情况下:
则需要考虑分类之后是否还需要依然保持红黑树,如果个数少则直接使用链表即可。
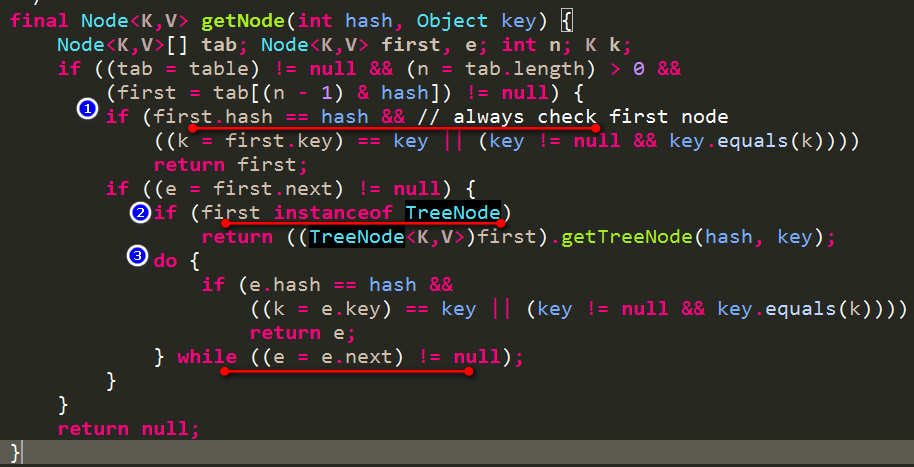
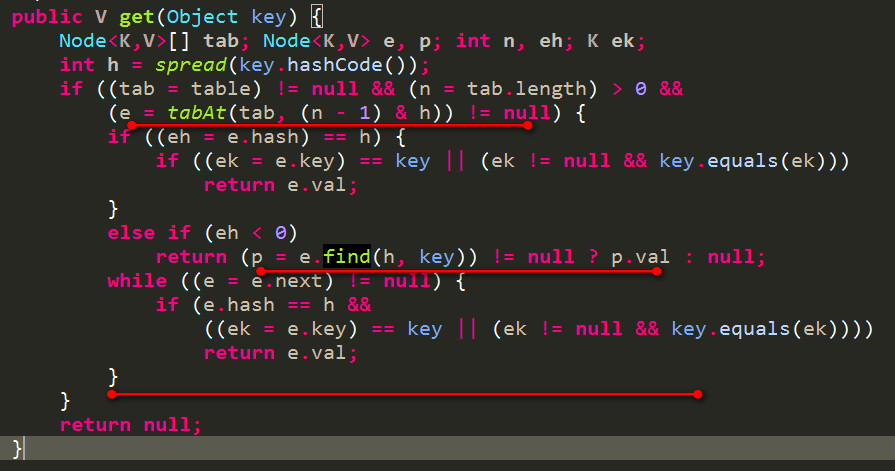
1.4 get过程
get过程比较简单
- 根据key计算出hash值
- hash值&(数组长度-1)得到所在数组的index
-
如果要找的key就是上述数组index位置的元素,直接返回该元素的值 如果该数组index位置元素是TreeNode类型,则按照红黑树的查询方式来进行查找 如果该数组index位置元素非TreeNode类型,则按照链表的方式来进行遍历查询源码如下:
1.7的ConcurrentHashMap设计
ConcurrentHashMap是线程安全,通过分段锁的方式提高了并发度。分段是一开始就确定的了,后期不能再进行扩容的。
其中的段Segment继承了重入锁ReentrantLock,有了锁的功能,同时含有类似HashMap中的数组加链表结构(这里没有使用红黑树)
虽然Segment的个数是不能扩容的,但是单个Segment里面的数组是可以扩容的。
2.1 整体概览
ConcurrentHashMap有3个参数:
initialCapacity:初始总容量,默认16 loadFactor:加载因子,默认0.75 concurrencyLevel:并发级别,默认16然后我们需要知道的是:
- segment的个数即ssize
-
取大于等于并发级别的最小的2的幂次。如concurrencyLevel=16,那么sszie=16,如concurrencyLevel=10,那么ssize=16
- 单个segment的初始容量cap
-
c=initialCapacity/ssize,并且可能需要+1。如15/7=2,那么c要取3,如16/8=2,那么c取2
c可能是一个任意值,那么同上述一样,cap取的值就是大于等于c的最下2的幂次。最小值要求是2
- 单个segment的阈值threshold
-
cap*loadFactor
所以默认情况下,segment的个数sszie=16,每个segment的初始容量cap=2,单个segment的阈值threshold=1
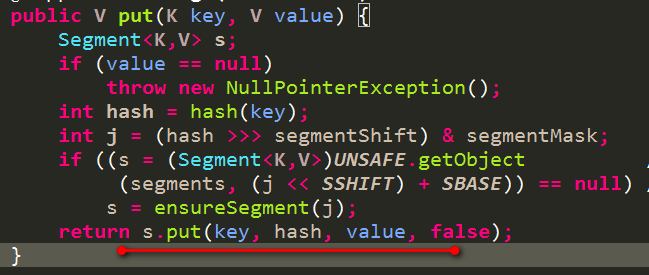
2.2 put过程
- 首先根据key计算出一个hash值,找到对应的Segment
- 调用Segment的lock方法,为后面的put操作加锁
- 根据key计算出hash值,找到Segment中数组中对应index的链表,并将该数据放置到该链表中
- 判断当前Segment包含元素的数量大于阈值,则Segment进行扩容
-
整体代码逻辑见如下源码:
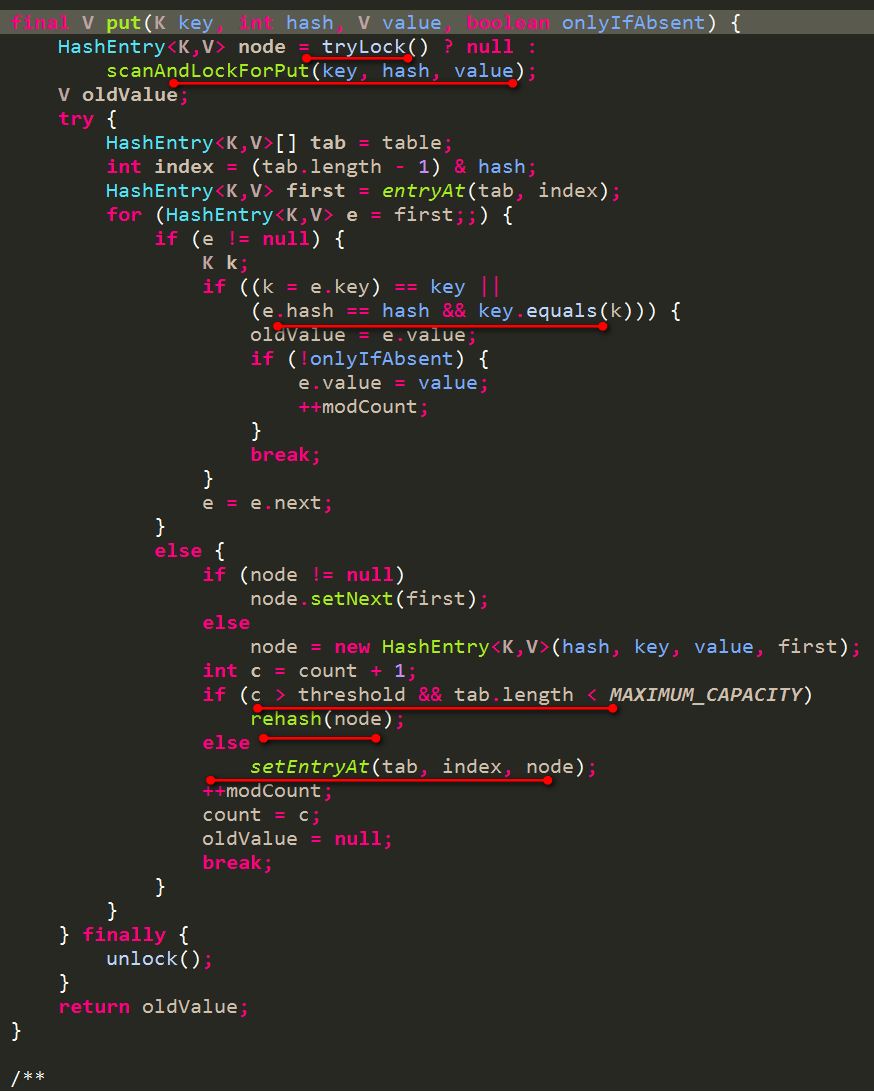
其中上述Segment的put过程源码如下:
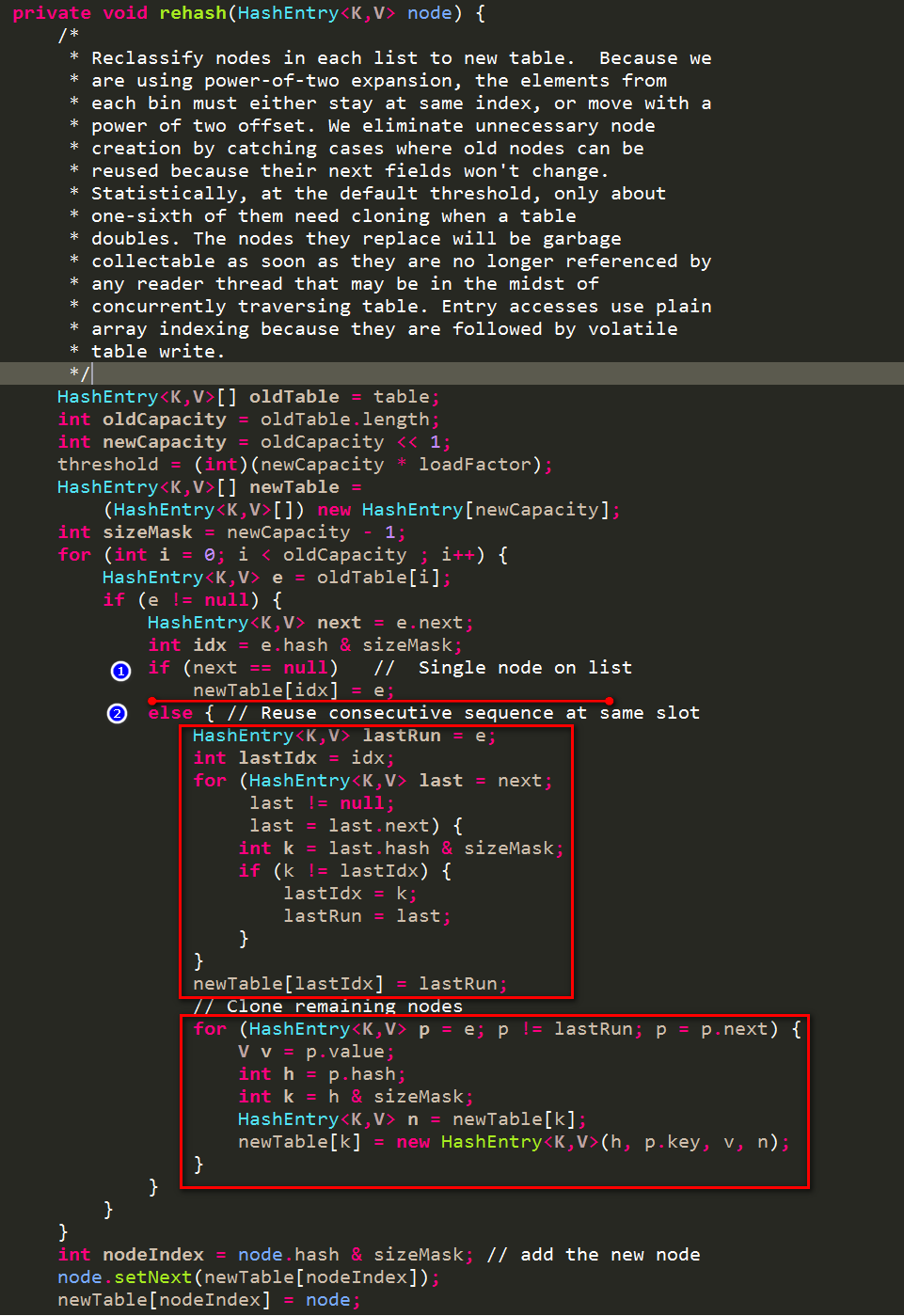
2.3 扩容过程
这个扩容是在Segment的锁的保护下进行扩容的,不需要关注并发问题。
这里的重点就是:
首先找到一个lastRun,lastRun之后的元素和lastRun是在同一个桶中,所以后面的不需要进行变动。
然后对开始到lastRun部分的元素,重新计算下设置到newTable中,每次都是将当前元素作为newTable的首元素,之前老的链表作为该首元素的next部分。
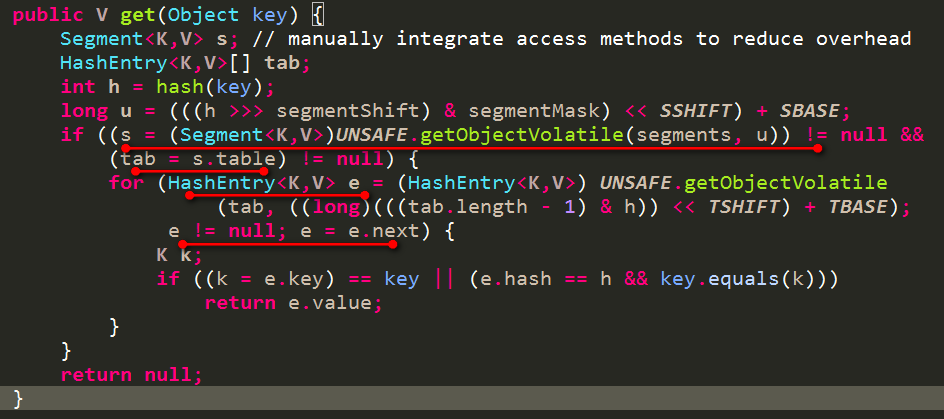
2.4 get过程
- 根据key计算出对应的segment
- 再根据key计算出对应segment中数组的index
- 最终遍历上述index位置的链表,查找出对应的key的value
-
源码如下:
1.8的ConcurrentHashMap设计
1.8的ConcurrentHashMap摒弃了1.7的segment设计,而是在1.8HashMap的基础上实现了线程安全的版本,即也是采用数组+链表+红黑树的形式。
数组可以扩容,链表可以转化为红黑树
3.1 整体概览
有一个重要的参数sizeCtl,代表数组的大小(但是还有其他取值及其含义,后面再详细说到)
用户可以设置一个初始容量initialCapacity给ConcurrentHashMap
sizeCtl=大于(1.5倍initialCapacity+1)的最小的2的幂次。
即initialCapacity=20,则sizeCtl=32,如initialCapacity=24,则sizeCtl=64。
初始化的时候,会按照sizeCtl的大小创建出对应大小的数组
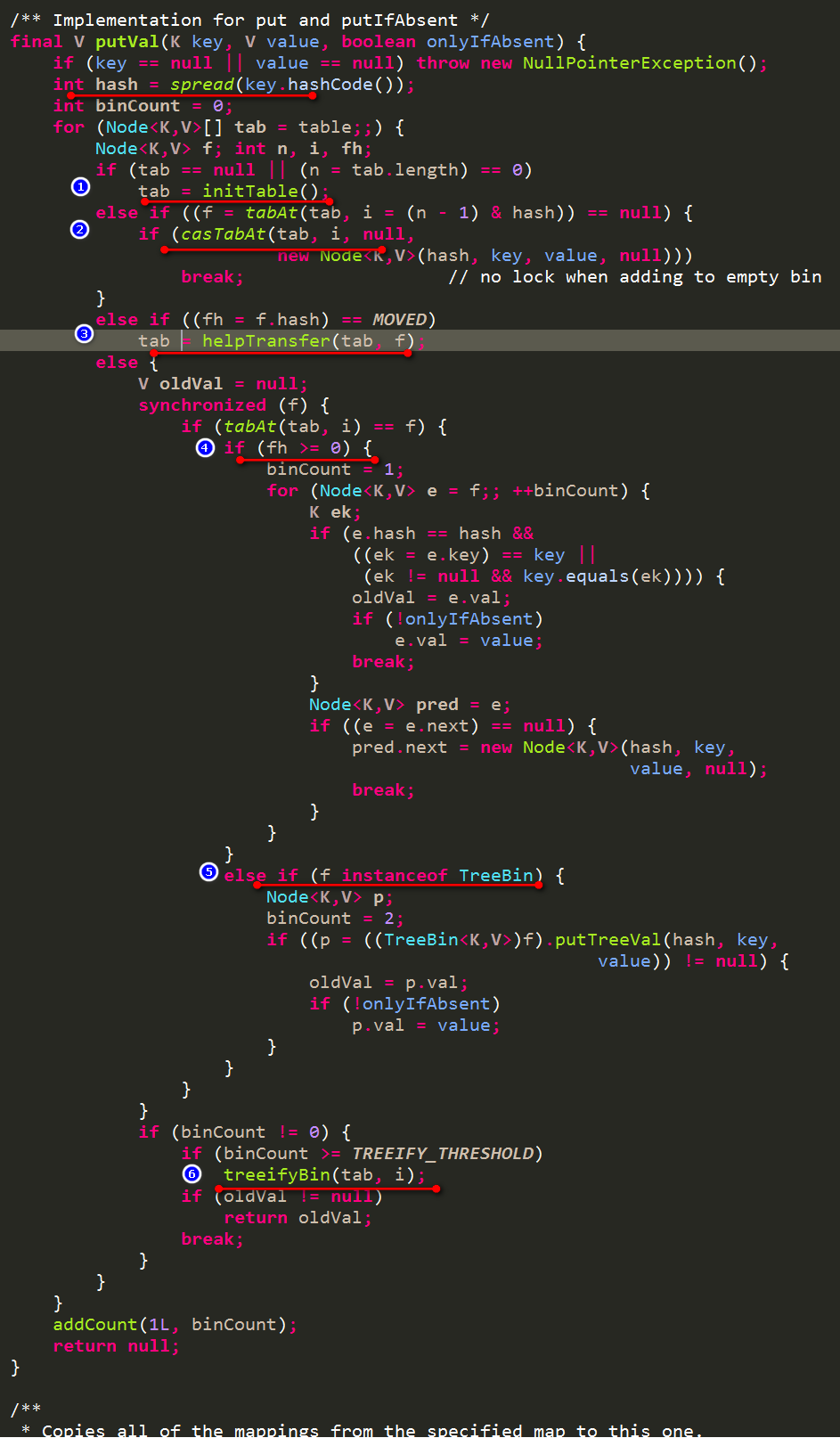
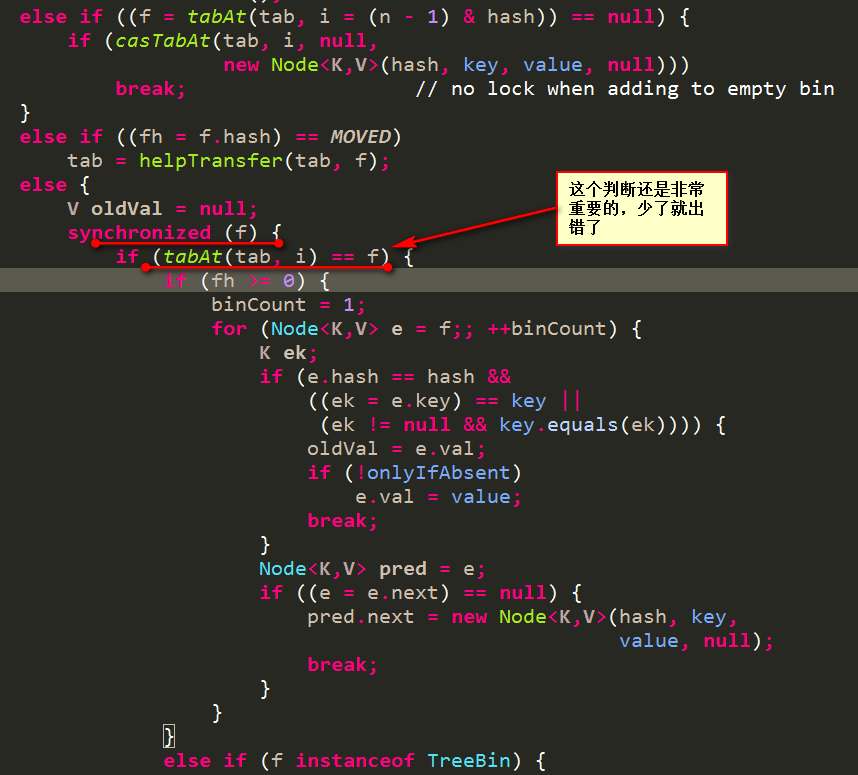
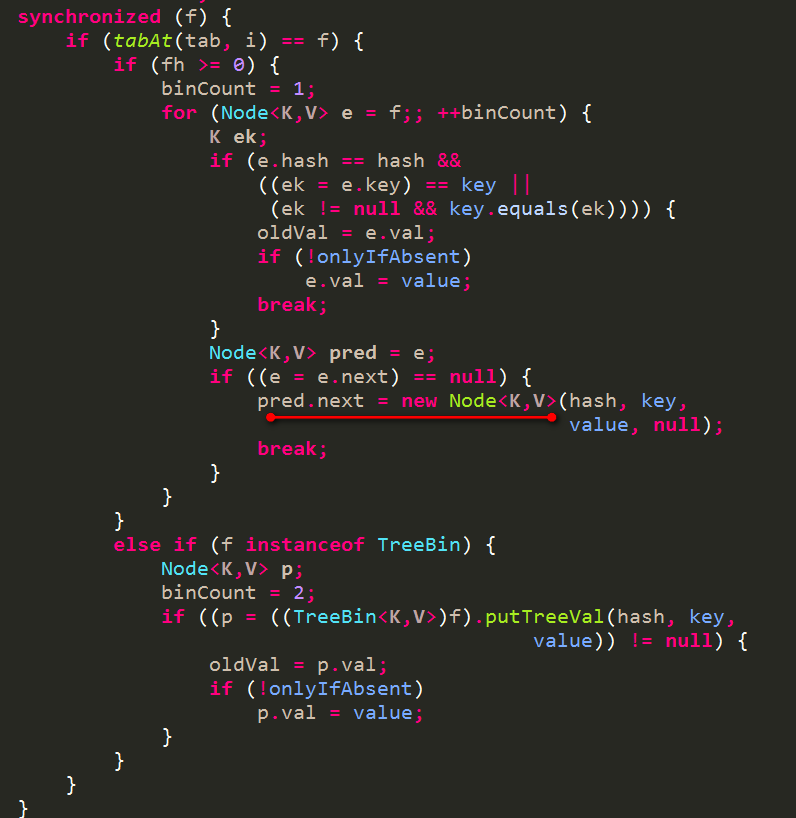
3.2 put过程
源码如下所示:
- 如果数组还未初始化,那么进行初始化,这里会通过一个CAS操作将sizeCtl设置为-1,设置成功的,可以进行初始化操作
- 根据key的hash值找到对应的桶,如果桶还不存在,那么通过一个CAS操作来设置桶的第一个元素,失败的继续执行下面的逻辑即向桶中插入或更新
- 如果找到的桶存在,但是桶中第一个元素的hash值是-1,说明此时该桶正在进行迁移操作,这一块会在下面的扩容中详细谈及。
- 如果找到的桶存在,那么要么是链表结构要么是红黑树结构,此时需要获取该桶的锁,在锁定的情况下执行链表或者红黑树的插入或更新
-
如果桶中第一个元素的hash值大于0,说明是链表结构,则对链表插入或者更新 如果桶中的第一个元素类型是TreeBin,说明是红黑树结构,则按照红黑树的方式进行插入或者更新 - 在锁的保护下插入或者更新完毕后,如果是链表结构,需要判断链表中元素的数量是否超过8(默认),一旦超过就要考虑进行数组扩容或者是链表转红黑树
-
下面就来重点看看这个扩容过程
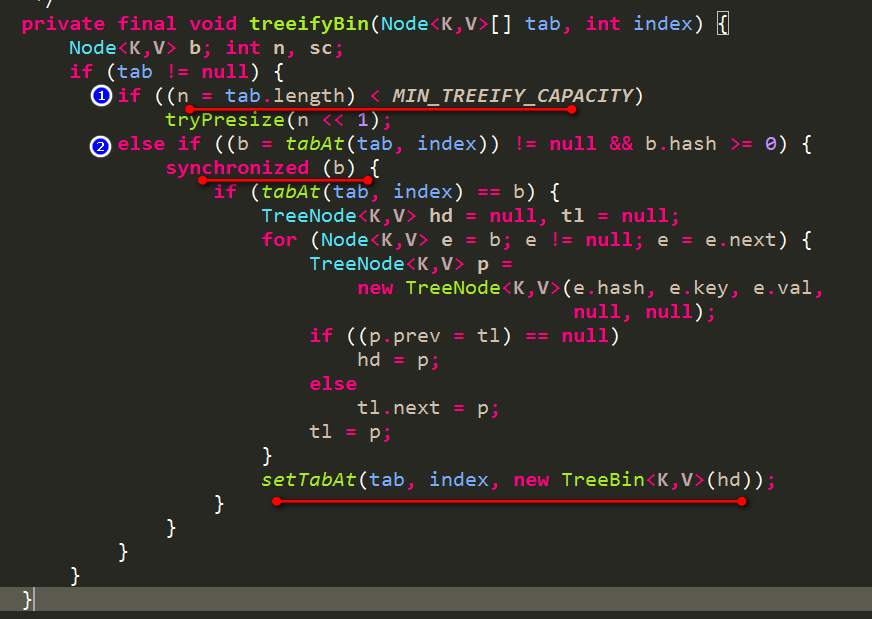
3.3 扩容过程
一旦链表中的元素个数超过了8个,那么可以执行数组扩容或者链表转为红黑树,这里依据的策略跟HashMap依据的策略是一致的。
当数组长度还未达到64个时,优先数组的扩容,否则选择链表转为红黑树。
源码如下所示:
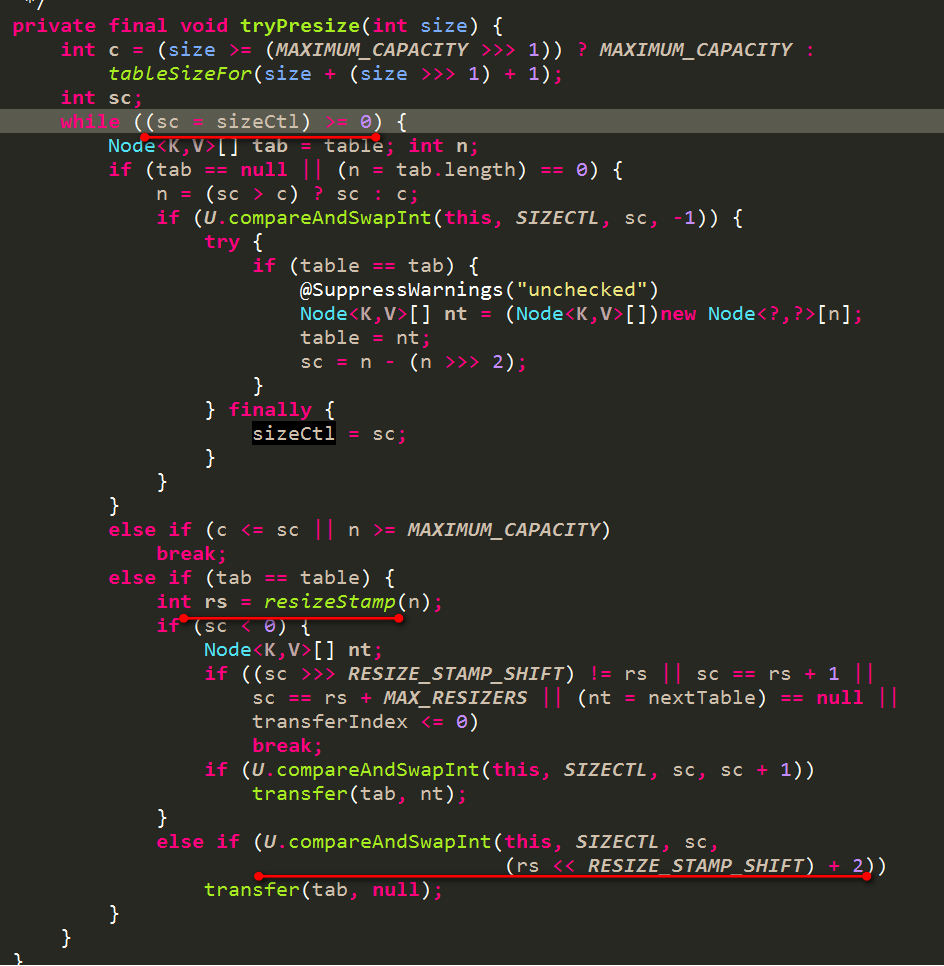
重点来看看这个扩容过程,即看下上述tryPresize方法,也可以看到上述是2倍扩容的方式
第一个执行的线程会首先设置sizeCtl属性为一个负值,然后执行transfer(tab, null),其他晚进来的线程会检查当前扩容是否已经完成,没完成则帮助进行扩容,完成了则直接退出。
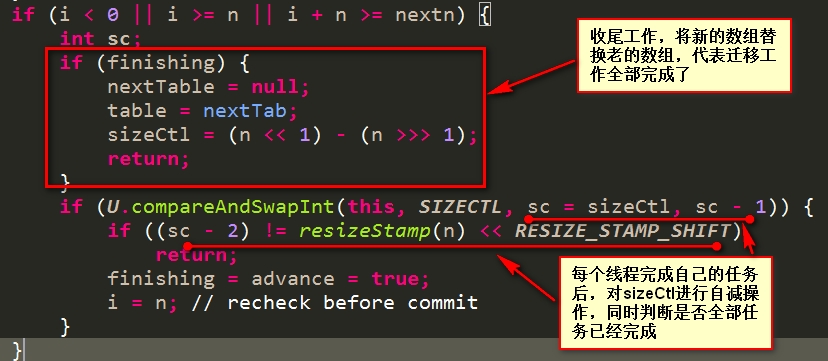
该ConcurrentHashMap的扩容操作可以允许多个线程并发执行,那么就要处理好任务的分配工作。每个线程获取一部分桶的迁移任务,如果当前线程的任务完成,查看是否还有未迁移的桶,若有则继续领取任务执行,若没有则退出。在退出时需要检查是否还有其他线程在参与迁移工作,如果有则自己什么也不做直接退出,如果没有了则执行最终的收尾工作。
问题1:当前线程如何感知其他线程也在参与迁移工作?
靠sizeCtl的值,它初始值是一个负值=(rs << RESIZE_STAMP_SHIFT) + 2),每当一个线程参与进来执行迁移工作,则该值进行CAS自增,该线程的任务执行完毕要退出时对该值进行CAS自减操作,所以当sizeCtl的值等于上述初值则说明了此时未有其他线程还在执行迁移工作,可以去执行收尾工作了。见如下代码
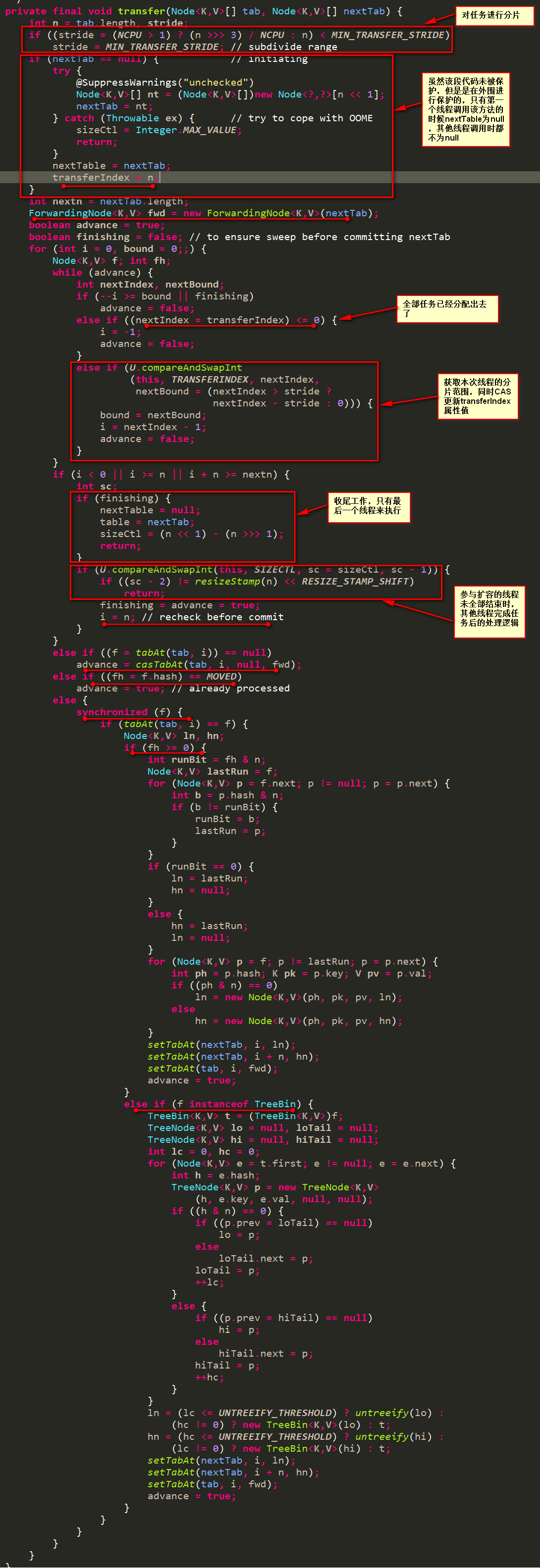
问题2:任务按照何规则进行分片?
上述stride即是每个分片的大小,目前有最低要求16,即每个分片至少需要16个桶。stride的计算依赖于CPU的核数,如果只有1个核,那么此时就不用分片,即stride=n。其他情况就是 (n >>> 3) / NCPU。
问题3:如何记录目前已经分出去的任务?
ConcurrentHashMap含有一个属性transferIndex(初值为最后一个桶),表示从transferIndex开始到后面所有的桶的迁移任务已经被分配出去了。所以每次线程领取扩容任务,则需要对该属性进行CAS的减操作,即一般是transferIndex-stride。
问题4:每个线程如何处理分到的部分桶的迁移工作
第一个获取到分片的线程会创建一个新的数组,容量是之前的2倍。
遍历自己所分到的桶:
桶中元素不存在,则通过CAS操作设置桶中第一个元素为ForwardingNode,其Hash值为MOVED(-1),同时该元素含有新的数组引用 此时若其他线程进行put操作,发现第一个元素的hash值为-1则代表正在进行扩容操作(并且表明该桶已经完成扩容操作了,可以直接在新的数组中重新进行hash和插入操作),该线程就可以去参与进去,或者没有任务则不用参与,此时可以去直接操作新的数组了 桶中元素存在且hash值为-1,则说明该桶已经被处理了(本不会出现多个线程任务重叠的情况,这里主要是该线程在执行完所有的任务后会再次进行检查,再次核对) 桶中为链表或者红黑树结构,则需要获取桶锁,防止其他线程对该桶进行put操作,然后处理方式同HashMap的处理方式一样,对桶中元素分为2类,分别代表当前桶中和要迁移到新桶中的元素。设置完毕后代表桶迁移工作已经完成,旧数组中该桶可以设置成ForwardingNode了下面来看下详细的代码:
3.4 get过程
- 根据k计算出hash值,找到对应的数组index
- 如果该index位置无元素则直接返回null
- 如果该index位置有元素
-
如果第一个元素的hash值小于0,则该节点可能为ForwardingNode或者红黑树节点TreeBin 如果是ForwardingNode(表示当前正在进行扩容),使用新的数组来进行查找 如果是红黑树节点TreeBin,使用红黑树的查找方式来进行查找 如果第一个元素的hash大于等于0,则为链表结构,依次遍历即可找到对应的元素详细代码如下
至此,ConcurrentHashMap主要的操作都粗略的介绍完毕了,其他一些操作靠各位自行去看了。
下面针对一些问题来进行解答
问题分析
4.1 ConcurrentHashMap读为什么不需要锁?
我们通常使用读写锁来保护对一堆数据的读写操作。读时加读锁,写时加写锁。在什么样的情况下可以不需要读锁呢?
如果对数据的读写是一个原子操作,那么此时是可以不需要读锁的。如ConcurrentHashMap对数据的读写,写操作是不需要分2次写的(没有中间状态),读操作也是不需要2次读取的。假如一个写操作需要分多次写,必然会有中间状态,如果读不加锁,那么可能就会读到中间状态,那就不对了。
假如ConcurrentHashMap提供put(key1,value1,key2,value2),写入的时候必然会存在中间状态即key1写完成,但是key2还未写,此时如果读不加锁,那么就可能读到key1是新数据而key2是老数据的中间状态。
虽然ConcurrentHashMap的读不需要锁,但是需要保证能读到最新数据,所以必须加volatile。即数组的引用需要加volatile,同时一个Node节点中的val和next属性也必须要加volatile。
4.2 ConcurrentHashMap是否可以在无锁的情况下进行迁移?
目前1.8的ConcurrentHashMap迁移是在锁定旧桶的前提下进行迁移的,然而并没有去锁定新桶。那么就可能提出如下问题:
- 在某个桶的迁移过程中,别的线程想要对该桶进行put操作怎么办?
-
一旦某个桶在迁移过程中了,必然要获取该桶的锁,所以其他线程的put操作要被阻塞,一旦迁移完毕,该桶中第一个元素就会被设置成ForwardingNode节点,所以其他线程put时需要重新判断下桶中第一个元素是否被更改了,如果被改了重新获取重新执行逻辑,如下代码
- 某个桶已经迁移完成(其他桶还未完成),别的线程想要对该桶进行put操作怎么办?
-
该线程会首先检查是否还有未分配的迁移任务,如果有则先去执行迁移任务,如果没有即全部任务已经分发出去了,那么此时该线程可以直接对新的桶进行插入操作(映射到的新桶必然已经完成了迁移,所以可以放心执行操作)
从上面看到我们在迁移的时候还是需要对旧桶锁定的,能否在无锁的情况下实现迁移?
可以参考参考这篇论文Split-Ordered Lists: Lock-Free Extensible Hash Tables
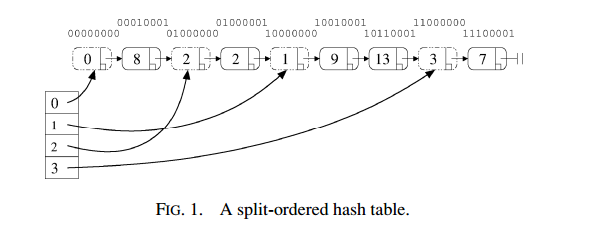
一旦扩容就涉及到迁移桶中元素的操作,将一个桶中的元素迁移到另一个桶中的操作不是一个原子操作,所以需要在锁的保护下进行迁移。如果扩容操作是移动桶的指向,那么就可以通过一个CAS操作来完成扩容操作。上述Split-Ordered Lists就是把所有元素按照一定的顺序进行排列。该list被分成一段一段的,每一段都代表某个桶中的所有元素。每个桶中都有一个指向第一个元素的指针,如下图结构所示:
每一段其实也是分成2类的,如同前面所说的HashMap在扩容是分成2类的情况是一样的,此时Split-Ordered Lists在扩容时就只需要将新桶的指针指向这2类的分界点即可。
这一块之后再详细说明吧。
4.3 ConcurrentHashMap曾经的弱一致性
具体详见这篇针对老版本的ConcurrentHashMap的说明文章为什么ConcurrentHashMap是弱一致的
文中已经解释到:对数组的引用是volatile来修饰的,但是数组中的元素并不是。即读取数组的引用总是能读取到最新的值,但是读取数组中某一个元素的时候并不一定能读到最新的值。所以说是弱一致性的。
我觉得这个只需要稍微改动下就可以实现强一致性:
- 对于新加的key,通过写入到链表的末尾即可。因为一个元素的next属性是volatile的,可以保证写入后立马看的到,如下1.8的方式
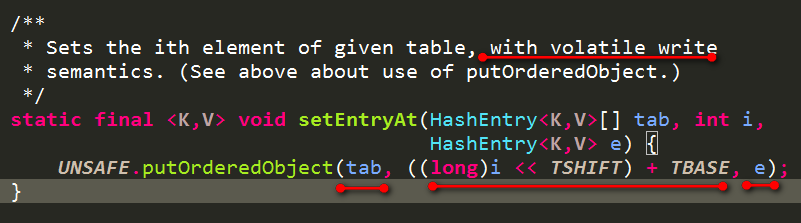
- 或者对数组中元素的更新采用volatile写的方式,如下1.7的形式
-
但是现在1.7版本的ConcurrentHashMap对于数组中元素的写也是加了volatile的,如下代码
1.8的方式就是:直接将新加入的元素写入next属性(含有volatile修饰)中而不是修改桶中的第一个元素。
所以在1.7和1.8版本的ConcurrentHashMap中不再是弱一致性,写入的数据是可以立马本读到的。


















 290
290

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









