






作者简介:Loopers,码龄11年,喜欢研究内核基本原理
suspend 代码入口
state_store函数分析
pm_suspend函数分析
enter_state函数分析
suspend_prepare 函数分析
suspend_devices_and_enter 函数分析
dpm_suspend_start 函数分析
suspend_enter 函数分析
我们知道Linux电源管理存在的几种方式,如何查看这几种方式,以及最后的如何睡眠唤醒等。通过echo mem > /sys/power/state就可以达到睡眠,所以可以根据此节点的sys代码分析suspend的流程。
suspend 代码入口
执行如下命令:
echo mem > /sys/power/state
根据sys节点的属性命令规则,可以得到此节点的实现代码为: state_store
state_store函数分析
static ssize_t state_store(struct kobject *kobj, struct kobj_attribute *attr,
const char *buf, size_t n)
{
suspend_state_t state;
int error;
error = pm_autosleep_lock();
if (error)
return error;
if (pm_autosleep_state() > PM_SUSPEND_ON) {
error = -EBUSY;
goto out;
}
state = decode_state(buf, n);
if (state < PM_SUSPEND_MAX)
error = pm_suspend(state);
else if (state == PM_SUSPEND_MAX)
error = hibernate();
else
error = -EINVAL;
out:
pm_autosleep_unlock();
return error ? error : n;
}pm_autosleep_lock
int pm_autosleep_lock(void)
{
return mutex_lock_interruptible(&autosleep_lock);
}获得autosleep锁,锁住autosleep功能,此功能在后面分析。
判断当前autosleep的状态,如果当前状态大于PM_SUSPEND_ON则,返回退出。关于suspend的状态如下:
#define PM_SUSPEND_ON ((__force suspend_state_t) 0)
#define PM_SUSPEND_FREEZE ((__force suspend_state_t) 1)
#define PM_SUSPEND_STANDBY ((__force suspend_state_t) 2)
#define PM_SUSPEND_MEM ((__force suspend_state_t) 3)
#define PM_SUSPEND_MIN PM_SUSPEND_FREEZE
#define PM_SUSPEND_MAX ((__force suspend_state_t) 4)解析当前传入的state。如果state小于PM_SUSPEND_MAX就走suspend流程,等于PM_SUSPEND_MAX就走hibernate流程。假如我们传入的是mem, 则就会走suspend流程。
pm_suspend函数分析
int pm_suspend(suspend_state_t state)
{
int error;
if (state <= PM_SUSPEND_ON || state >= PM_SUSPEND_MAX)
return -EINVAL;
pm_suspend_marker("entry");
error = enter_state(state);
if (error) {
suspend_stats.fail++;
dpm_save_failed_errno(error);
} else {
suspend_stats.success++;
}
pm_suspend_marker("exit");
return error;
}依然会再次判断当前的state是否在PM_SUSPEND_ON和PM_SUSPEND_MAX之间
pm_suspend_marker("entry")
static void pm_suspend_marker(char *annotation)
{
struct timespec ts;
struct rtc_time tm;
getnstimeofday(&ts);
rtc_time_to_tm(ts.tv_sec, &tm);
pr_info("PM: suspend %s %d-%02d-%02d %02d:%02d:%02d.%09lu UTC\n",
annotation, tm.tm_year + 1900, tm.tm_mon + 1, tm.tm_mday,
tm.tm_hour, tm.tm_min, tm.tm_sec, ts.tv_nsec);
}在suspend之间记录时间,用于统计或者调试suspend花费的时间。
调用enter_state进入suspend的下一步,如果执行suspend成功,增加suspend.success的引用计数,否则增加suspend.fail的引用计数。
enter_state函数分析
static int enter_state(suspend_state_t state)
{
int error;
trace_suspend_resume(TPS("suspend_enter"), state, true);
if (state == PM_SUSPEND_FREEZE) {
#ifdef CONFIG_PM_DEBUG
if (pm_test_level != TEST_NONE && pm_test_level <= TEST_CPUS) {
pr_warning("PM: Unsupported test mode for freeze state,"
"please choose none/freezer/devices/platform.\n");
return -EAGAIN;
}
#endif
} else if (!valid_state(state)) {
return -EINVAL;
}
if (!mutex_trylock(&pm_mutex))
return -EBUSY;
if (state == PM_SUSPEND_FREEZE)
freeze_begin();
trace_suspend_resume(TPS("sync_filesystems"), 0, true);
printk(KERN_INFO "PM: Syncing filesystems ... ");
sys_sync();
printk("done.\n");
trace_suspend_resume(TPS("sync_filesystems"), 0, false);
pr_debug("PM: Preparing system for %s sleep\n", pm_states[state]);
error = suspend_prepare(state);
if (error)
goto Unlock;
if (suspend_test(TEST_FREEZER))
goto Finish;
trace_suspend_resume(TPS("suspend_enter"), state, false);
pr_debug("PM: Entering %s sleep\n", pm_states[state]);
pm_restrict_gfp_mask();
error = suspend_devices_and_enter(state);
pm_restore_gfp_mask();
Finish:
pr_debug("PM: Finishing wakeup.\n");
suspend_finish();
Unlock:
mutex_unlock(&pm_mutex);
return error;
}通过vaild_state函数用来判断该平台是否支持该状态睡眠。
static bool valid_state(suspend_state_t state)
{
return suspend_ops && suspend_ops->valid && suspend_ops->valid(state);
}调用mutex_trylock获得一个mutex锁,防止在suspend的时候再次suspend。
如果当前state是PM_SUSPEND_FREEZE,则调用freeze_begin做开始准备工作。
同步文件系统。
调用suspend_prepare做进一步suspend前期准备工作,准备控制台,冻结内核线程等。
调用suspend_devices_and_enter做设备以及系统相关的susupend操作。
调用suspend_finish做最后的恢复工作。
suspend_prepare 函数分析
static int suspend_prepare(suspend_state_t state)
{
int error;
if (!sleep_state_supported(state))
return -EPERM;
pm_prepare_console();
error = pm_notifier_call_chain(PM_SUSPEND_PREPARE);
if (error)
goto Finish;
trace_suspend_resume(TPS("freeze_processes"), 0, true);
error = suspend_freeze_processes();
trace_suspend_resume(TPS("freeze_processes"), 0, false);
if (!error)
return 0;
suspend_stats.failed_freeze++;
dpm_save_failed_step(SUSPEND_FREEZE);
Finish:
pm_notifier_call_chain(PM_POST_SUSPEND);
pm_restore_console();
return error;
}检测该平台suspend_ops是否实现了enter函数。
static bool sleep_state_supported(suspend_state_t state)
{
return state == PM_SUSPEND_FREEZE || (suspend_ops && suspend_ops->enter);
}调用pm_prepare_console函数切换控制台,重新分配一个suspend模式下控制台,然后重定向kmsg。
通过调用pm通知链,发送PM_SUSPEND_PREPARE消息。
int pm_notifier_call_chain(unsigned long val)
{
int ret = blocking_notifier_call_chain(&pm_chain_head, val, NULL);
return notifier_to_errno(ret);
}那谁会收到这类消息呢? 只有通过register_pm_notifier的设备,子系统会在这个时候处理自己的事情。
int register_pm_notifier(struct notifier_block *nb)
{
return blocking_notifier_chain_register(&pm_chain_head, nb);
}调用suspend_freeze_processes冻结userhelper进程,已经内核线程。如果冻结出现失败,记录失败的引用计数。
接着会通过通知链恢复suspend,已经恢复控制台。
suspend_devices_and_enter 函数分析
int suspend_devices_and_enter(suspend_state_t state)
{
int error;
bool wakeup = false;
if (!sleep_state_supported(state))
return -ENOSYS;
error = platform_suspend_begin(state);
if (error)
goto Close;
suspend_console();
suspend_test_start();
error = dpm_suspend_start(PMSG_SUSPEND);
if (error) {
pr_err("PM: Some devices failed to suspend, or early wake event detected\n");
log_suspend_abort_reason("Some devices failed to suspend, or early wake event detected");
goto Recover_platform;
}
suspend_test_finish("suspend devices");
if (suspend_test(TEST_DEVICES))
goto Recover_platform;
do {
error = suspend_enter(state, &wakeup);
} while (!error && !wakeup && platform_suspend_again(state));
Resume_devices:
suspend_test_start();
dpm_resume_end(PMSG_RESUME);
suspend_test_finish("resume devices");
trace_suspend_resume(TPS("resume_console"), state, true);
resume_console();
trace_suspend_resume(TPS("resume_console"), state, false);
Close:
platform_resume_end(state);
return error;
Recover_platform:
platform_recover(state);
goto Resume_devices;
}调用sleep_state_supported函数判断当前平台是否实现了suspend_ops,已经suspend_ops->enter函数。
如果当前状态是freeze,就调用freeze_ops的begin函数。否则就调用平台相关的begin函数。这里的begin主要是各个平台pm的一些设置,每个平台的操作都不一样,这里不详细说明。
调用suspend_console挂起控制台,防止其它代码访问该控制台。
调用suspend_test_start记录当前suspend刚开始的时候的时间,使用jiffies表示。
调用dpm_suspend_start函数,该函数主要是调用所有设备的prepare和suspend回调函数。如果出现suspend失败,则会打印"fail suspend"的log,以及调用platform_recover函数执行平台相关的recover回调。
调用suspend_enter使整个系统进入suspend状态。
dpm_suspend_start 函数分析
int dpm_suspend_start(pm_message_t state)
{
int error;
error = dpm_prepare(state);
if (error) {
suspend_stats.failed_prepare++;
dpm_save_failed_step(SUSPEND_PREPARE);
} else
error = dpm_suspend(state);
return error;
}调用dpm_prepare函数,执行所有设备的prepare回调函数。执行顺序是pm_domain-type-class-bus-driver,如果失败设置failed_prepare的引用计数值。
调用dpm_suspend函数,执行所有设备的suspend回调函数。
suspend_enter 函数分析
上面对dpm_suspend_start函数进行了分析,该函数中主要是调用所有设备的prepare和suspend回调函数。而在suspend_enter主要是使系统进入到suspend中。
static int suspend_enter(suspend_state_t state, bool *wakeup)
{
char suspend_abort[MAX_SUSPEND_ABORT_LEN];
int error, last_dev;
error = platform_suspend_prepare(state);
if (error)
goto Platform_finish;
error = dpm_suspend_late(PMSG_SUSPEND);
if (error) {
last_dev = suspend_stats.last_failed_dev + REC_FAILED_NUM - 1;
last_dev %= REC_FAILED_NUM;
printk(KERN_ERR "PM: late suspend of devices failed\n");
log_suspend_abort_reason("%s device failed to power down",
suspend_stats.failed_devs[last_dev]);
goto Platform_finish;
}
error = platform_suspend_prepare_late(state);
if (error)
goto Devices_early_resume;
error = dpm_suspend_noirq(PMSG_SUSPEND);
if (error) {
last_dev = suspend_stats.last_failed_dev + REC_FAILED_NUM - 1;
last_dev %= REC_FAILED_NUM;
printk(KERN_ERR "PM: noirq suspend of devices failed\n");
log_suspend_abort_reason("noirq suspend of %s device failed",
suspend_stats.failed_devs[last_dev]);
goto Platform_early_resume;
}
error = platform_suspend_prepare_noirq(state);
if (error)
goto Platform_wake;
if (suspend_test(TEST_PLATFORM))
goto Platform_wake;
if (state == PM_SUSPEND_FREEZE) {
trace_suspend_resume(TPS("machine_suspend"), state, true);
freeze_enter();
trace_suspend_resume(TPS("machine_suspend"), state, false);
goto Platform_wake;
}
error = disable_nonboot_cpus();
if (error || suspend_test(TEST_CPUS)) {
log_suspend_abort_reason("Disabling non-boot cpus failed");
goto Enable_cpus;
}
arch_suspend_disable_irqs();
BUG_ON(!irqs_disabled());
error = syscore_suspend();
if (!error) {
*wakeup = pm_wakeup_pending();
if (!(suspend_test(TEST_CORE) || *wakeup)) {
trace_suspend_resume(TPS("machine_suspend"),
state, true);
error = suspend_ops->enter(state);
trace_suspend_resume(TPS("machine_suspend"),
state, false);
events_check_enabled = false;
} else if (*wakeup) {
pm_get_active_wakeup_sources(suspend_abort,
MAX_SUSPEND_ABORT_LEN);
log_suspend_abort_reason(suspend_abort);
error = -EBUSY;
}
syscore_resume();
}
arch_suspend_enable_irqs();
BUG_ON(irqs_disabled());
Enable_cpus:
enable_nonboot_cpus();
Platform_wake:
platform_resume_noirq(state);
dpm_resume_noirq(PMSG_RESUME);
Platform_early_resume:
platform_resume_early(state);
Devices_early_resume:
dpm_resume_early(PMSG_RESUME);
Platform_finish:
platform_resume_finish(state);
return error;
}调用平台相关prepare回调函数,如果平台prepare设置失败,在调用平台相关的finish回调函数。
调用dpm_suspend_late函数。此函数主要调用dpm_suspend_list中的设备的suspend_late回调函数,然后又将这些设备加入到dpm_late_early_list链表中。如果出现失败,则跳到platform_finish做恢复工作。
如果当前休眠状态是PM_SUSPEND_FREEZE的话,调用freeze_ops中的prepare回调。
调用dpm_suspend_noirq函数,此函数主要是从dpm_late_early_list链表中取一个设备,然后调用该设备的suspend_noirq回调,同时将该设备加入到dpm_noirq_list链表中。
回调平台相关的preplate_late函数,做suspend最后关头的事情。
如果休眠状态是PM_SUSPEND_FREEZE,则frozen processes + suspended devices + idle processors
disable所有非nonboot的CPU,失败之后启动CPU。
关掉全局cpu中断,如果关掉中断,则报BUG
执行所有system core的suspend回调函数。
如果执行成功的话,这时候系统还会调用pm_wakeup_pending检查下,是否有唤醒事件发生,如果发生,停止suspend,恢复系统。
调用suspend_ops->enter函数,此函数会回调系统suspend函数,一般在ATF里实现。
这时候系统已经睡眠,如果这时候有唤醒事件发生,比如按下手机的power按键,系统又会接着suspend的地方,再次往下执行。也就是suspend的一些列反操作。
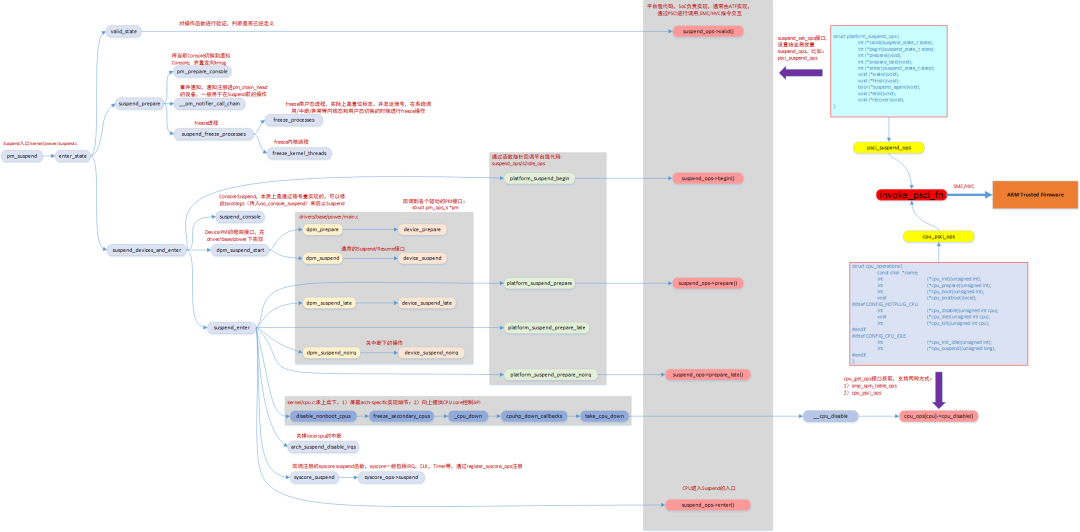
最后用一张图来总结Suspend的流程:

















 1397
1397

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









