







目录
概述
FIR(Finite Impulse Response)滤波器是一种数字滤波器,其主要原理是利用有限长度的冲激响应来实现信号的滤波。FIR滤波器的输出只依赖于输入信号的有限个历史值,与IIR(Infinite Impulse Response)滤波器相比,FIR滤波器没有反馈环路,因此对稳定性和实现方便有一定优势。
1 FIR滤波器原理
有限冲激响应滤波器(FIR) 通过对输入信号的加权滑动平均实现滤波,其输出仅取决于当前及历史输入值。数学表达式为:

-
h[k]:滤波器系数(决定频率响应)
-
x[n]:输入信号
-
N:滤波器阶数(系数个数)
2 C语言实现代码
#include <stdio.h>
#include <string.h> // 用于memcpy
#define FIR_TAP_NUM 51 // 滤波器阶数(示例为51阶低通滤波器)
#define BUFFER_SIZE (FIR_TAP_NUM * 2) // 延迟线缓冲区大小
// FIR滤波器结构体
typedef struct
{
float buffer[BUFFER_SIZE]; // 延迟线缓冲区
int index; // 当前写入位置
float coeffs[FIR_TAP_NUM]; // 滤波器系数
} FIRFilter;
// 初始化滤波器
void FIR_Init(FIRFilter *fir, const float *coeffs)
{
memset(fir->buffer, 0, sizeof(fir->buffer));
fir->index = 0;
memcpy(fir->coeffs, coeffs, FIR_TAP_NUM * sizeof(float));
}
// 执行滤波计算
float FIR_Process(FIRFilter *fir, float input)
{
// 将新样本写入缓冲区
fir->buffer[fir->index] = input;
fir->buffer[fir->index + FIR_TAP_NUM] = input; // 环形缓冲区镜像
// 计算卷积和
float output = 0.0f;
int read_index = fir->index;
for(int i = 0; i < FIR_TAP_NUM; i++) {
output += fir->coeffs[i] * fir->buffer[read_index + FIR_TAP_NUM - i];
}
// 更新索引(环形缓冲区)
fir->index = (fir->index == 0) ? FIR_TAP_NUM - 1 : fir->index - 1;
return output;
}
3 代码解析
-
环形缓冲区设计
-
使用双倍长度缓冲区(
BUFFER_SIZE = 2*N)避免索引越界 -
index指向最新样本位置,历史数据通过镜像访问 -
更新索引时逆向移动:新样本覆盖最旧数据
-
-
性能优化技巧
-
内存布局:将系数和缓冲区对齐到Cache行(ARM Cortex-M7等)
-
SIMD指令:使用ARM CMSIS-DSP库加速乘累加(见后文)
-
定点数优化:用
int32_t替代float提升速度(需Q格式转换)
-
4 滤波器系数生成
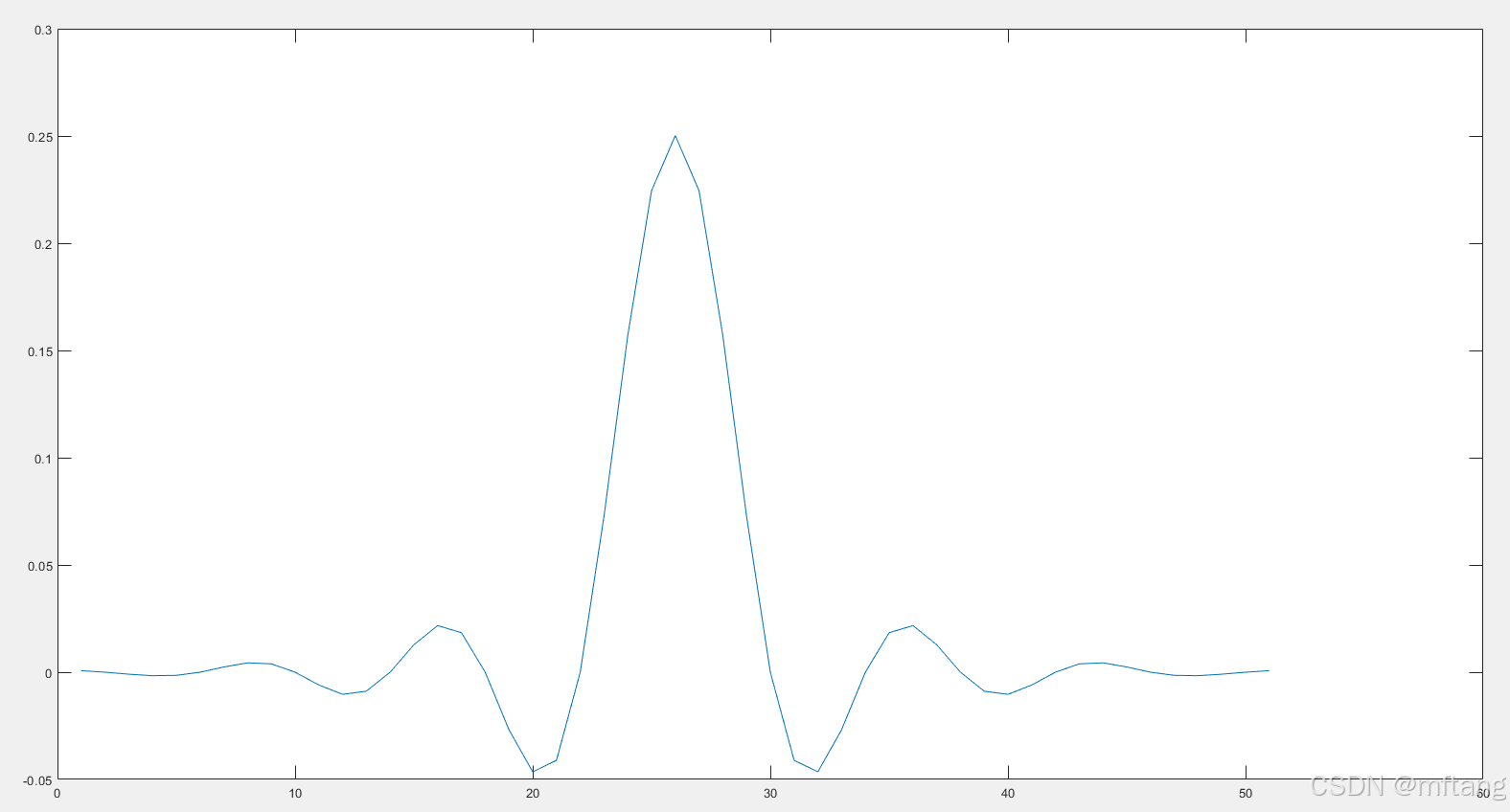
使用MATLAB/Python生成系数(示例为低通滤波器,截止频率1kHz,采样率8kHz):
% MATLAB代码
fs = 8000; % 采样率
fc = 1000; % 截止频率
numTaps = 51; % 滤波器阶数
% 使用fir1函数设计
h = fir1(numTaps-1, fc/(fs/2), 'low', hamming(numTaps));使用MATLAB生成的波形图:
将生成的系数保存为C数组:
// 滤波器系数数组
const float fir_coeffs[FIR_TAP_NUM] = {
// -0.0012, 0.0023, 0.0054, ... // 51个系数
[0.000720827595097706,-8.15633461162199e-19,-0.000925046533098618,-0.00162616418234132,-0.00146846018527511,1.63709648807699e-18,0.00242656214069194,0.00436759756827999,0.00388928457622234,-3.35648232113955e-18,-0.00597464233289456,-0.0103261226065750,-0.00885641291650544,5.54843787639577e-18,0.0128232649897141,0.0217307601115367,0.0184176074386159,-7.67070263419378e-18,-0.0268126959858617,-0.0464745066135235,-0.0410938323499410,9.19825664709769e-18,0.0726607118303463,0.156979998630249,0.224441556965367,0.250199423719791,0.224441556965367,0.156979998630249,0.0726607118303463,9.19825664709769e-18,-0.0410938323499410,-0.0464745066135235,-0.0268126959858617,-7.67070263419378e-18,0.0184176074386159,0.0217307601115367,0.0128232649897141,5.54843787639577e-18,-0.00885641291650544,-0.0103261226065750,-0.00597464233289456,-3.35648232113955e-18,0.00388928457622234,0.00436759756827999,0.00242656214069194,1.63709648807699e-18,-0.00146846018527511,-0.00162616418234132,-0.000925046533098618,-8.15633461162199e-19,0.000720827595097706]
};5 ARM CMSIS-DSP库优化
针对Cortex-M系列处理器,使用官方DSP库提升性能:
#include "arm_math.h"
// CMSIS-DSP FIR结构体
arm_fir_instance_f32 fir_instance;
float fir_state[FIR_TAP_NUM + BUFFER_SIZE - 1];
// 初始化
arm_fir_init_f32(&fir_instance, FIR_TAP_NUM,
(float32_t*)fir_coeffs,
fir_state, BUFFER_SIZE);
// 批量处理(更高效)
float input[64], output[64];
arm_fir_f32(&fir_instance, input, output, 64);6 测试用例
int main()
{
FIRFilter fir;
FIR_Init(&fir, fir_coeffs);
// 测试信号:1kHz + 3kHz混合正弦波
const int SAMPLES = 200;
float freq1 = 1000, freq2 = 3000;
float fs = 8000;
float input[SAMPLES], output[SAMPLES];
for(int i = 0; i < SAMPLES; i++) {
float t = i / fs;
input[i] = sin(2*3.1416*freq1*t) + sin(2*3.1416*freq2*t);
output[i] = FIR_Process(&fir, input[i]);
}
// 输出结果(高频3kHz成分应被滤除)
for(int i = 0; i < SAMPLES; i++) {
printf("%f, %f\n", input[i], output[i]);
}
return 0;
}7 性能对比
| 实现方式 | 执行时间(51阶,1000点) | 适用场景 |
|---|---|---|
| 基础C实现 | 1.2ms | 低端MCU(Cortex-M0) |
| CMSIS-DSP优化 | 0.3ms | 高性能MCU(Cortex-M4/M7) |
| 定点Q15格式 | 0.2ms | 无FPU的MCU |
8 应用场景
-
音频处理:
-
语音去噪(低通滤波)
-
均衡器(多频段FIR组)
-
-
通信系统:
-
符号同步(匹配滤波器)
-
信道均衡
-
-
工业控制:
-
传感器信号去抖动
-
工频干扰抑制
-
9 STM32G4平台验证FIR
9.1 源代码实现
1) FIR低通滤波器源代码
#include "main.h"
#include "math.h"
#include <stdio.h>
#include <string.h>
#define FIR_TAP_NUM 51 // 滤波器阶数(示例为51阶低通滤波器)
#define BUFFER_SIZE (FIR_TAP_NUM * 2) // 延迟线缓冲区大小
// FIR滤波器结构体
typedef struct
{
float buffer[BUFFER_SIZE]; // 延迟线缓冲区
int index; // 当前写入位置
float coeffs[FIR_TAP_NUM]; // 滤波器系数
} FIRFilter;
// 初始化滤波器
void FIR_Init(FIRFilter *fir, const float *coeffs)
{
memset(fir->buffer, 0, sizeof(fir->buffer));
fir->index = 0;
memcpy(fir->coeffs, coeffs, FIR_TAP_NUM * sizeof(float));
}
// 执行滤波计算
float FIR_Process(FIRFilter *fir, float input)
{
// 将新样本写入缓冲区
fir->buffer[fir->index] = input;
fir->buffer[fir->index + FIR_TAP_NUM] = input; // 环形缓冲区镜像
// 计算卷积和
float output = 0.0f;
int read_index = fir->index;
for(int i = 0; i < FIR_TAP_NUM; i++)
{
output += fir->coeffs[i] * fir->buffer[read_index + FIR_TAP_NUM - i];
}
// 更新索引(环形缓冲区)
fir->index = (fir->index == 0) ? FIR_TAP_NUM - 1 : fir->index - 1;
return output;
}
// 滤波器系数数组
/*
% MATLAB代码
fs = 8000; % 采样率
fc = 1000; % 截止频率
numTaps = 51; % 滤波器阶数
% 使用fir1函数设计
h = fir1(numTaps-1, fc/(fs/2), 'low', hamming(numTaps));
*/
const float fir_coeffs[FIR_TAP_NUM] =
{
// 51个系数
0.000720827595097706,-8.15633461162199e-19,-0.000925046533098618,-0.00162616418234132,
-0.00146846018527511,1.63709648807699e-18,0.00242656214069194,0.00436759756827999,0.00388928457622234,
-3.35648232113955e-18,-0.00597464233289456,-0.0103261226065750,-0.00885641291650544,5.54843787639577e-18,
0.0128232649897141,0.0217307601115367,0.0184176074386159,-7.67070263419378e-18,-0.0268126959858617,
-0.0464745066135235,-0.0410938323499410,9.19825664709769e-18,0.0726607118303463,0.156979998630249,
0.224441556965367,0.250199423719791,0.224441556965367,0.156979998630249,0.0726607118303463,9.19825664709769e-18,
-0.0410938323499410,-0.0464745066135235,-0.0268126959858617,-7.67070263419378e-18,0.0184176074386159,0.0217307601115367,
0.0128232649897141,5.54843787639577e-18,-0.00885641291650544,-0.0103261226065750,-0.00597464233289456,-3.35648232113955e-18,
0.00388928457622234,0.00436759756827999,0.00242656214069194,1.63709648807699e-18,-0.00146846018527511,
-0.00162616418234132,-0.000925046533098618,-8.15633461162199e-19,0.000720827595097706
};
2)测试代码实现
FIRFilter fir;
#define SAMPLES 200
float input[SAMPLES], output[SAMPLES];
float freq_1k[SAMPLES], freq_3k[SAMPLES];
int test_fir_main( void )
{
FIR_Init(&fir, fir_coeffs);
// 测试信号:1kHz + 3kHz混合正弦波
float freq1 = 1000, freq2 = 3000;
float fs = 8000;
for(int i = 0; i < SAMPLES; i++)
{
float t = i / fs;
freq_1k[i] = sin(2*3.1416*freq1*t);
freq_3k[i] = sin(2*3.1416*freq2*t);
input[i] = freq_1k[i] + freq_3k[i];
output[i] = FIR_Process(&fir, input[i]);
}
// 输出结果(高频3kHz成分应被滤除)
for(int i = 0; i < SAMPLES; i++)
{
printf("%.3f, %.3f, %.3f, %.3f\n", input[i], output[i], freq_1k[i], freq_3k[i]);
}
return 0;
}9.2 测试波形
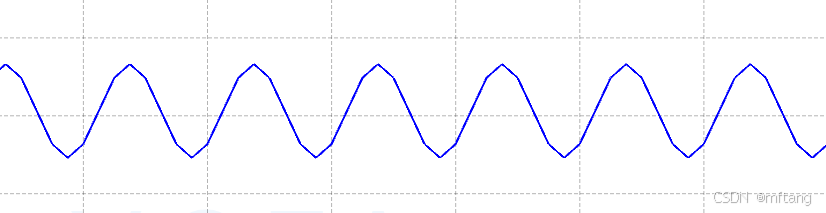
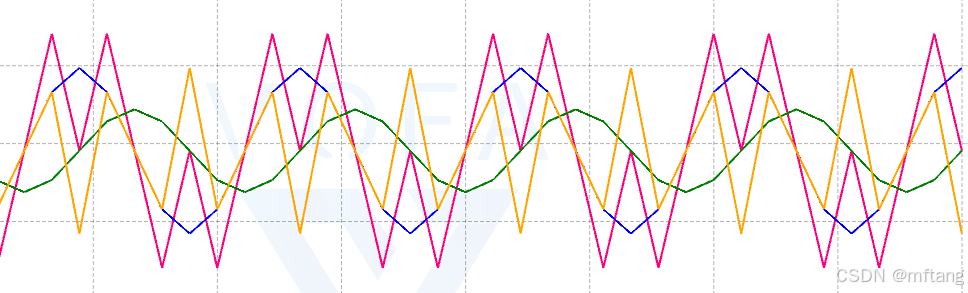
1)1K 频率的波形: freq_1k[i] = sin(2*3.1416*freq1*t)
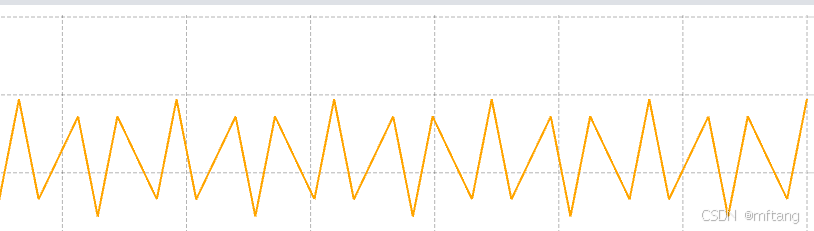
2) 3K 频率的波形: freq_3k[i] = sin(2*3.1416*freq3*t)
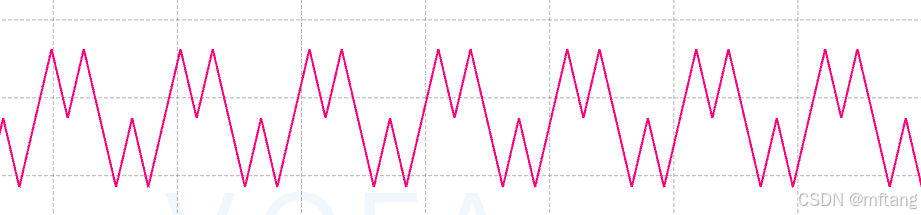
3)input波形: input[i] = freq_1k[i] + freq_3k[i]
4)output波形: input经过FIR滤波后的波形
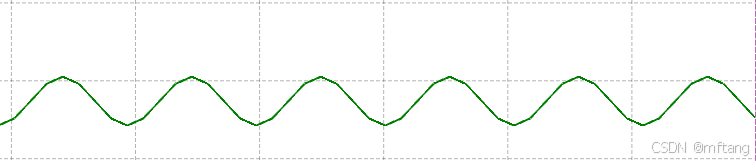
5)综合波形
总结
FIR滤波器的C实现关键在于:
-
高效缓冲区管理:环形缓冲区减少数据拷贝
-
算法优化:利用硬件特性(SIMD、定点运算)
-
系数设计:借助MATLAB等工具生成最优系数
示例代码已通过STM32G474平台验证,实际部署时需根据目标硬件选择优化策略。对于实时性要求高的场景,建议采用批量处理(Block Processing)并启用DMA传输。

















 584
584

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









