









 文章介绍了AIR32F103系列微控制器在不同应用场景的使用,包括Linux环境下的开发、FreeRTOS集成、外设如ADC、I2S和CAN总线的利用。此外,文章还详细展示了合宙新推出的Bluepill核心板设计,强调了其对STM32用户的友好性,并提及了电路元件如LDO、TVS和晶振的选择。作者进行了焊接和运行测试,证明了板子的可靠性。
文章介绍了AIR32F103系列微控制器在不同应用场景的使用,包括Linux环境下的开发、FreeRTOS集成、外设如ADC、I2S和CAN总线的利用。此外,文章还详细展示了合宙新推出的Bluepill核心板设计,强调了其对STM32用户的友好性,并提及了电路元件如LDO、TVS和晶振的选择。作者进行了焊接和运行测试,证明了板子的可靠性。
目录
- AIR32F103(一) 合宙AIR32F103CBT6开发板上手报告
- AIR32F103(二) Linux环境和LibOpenCM3项目模板
- AIR32F103(三) Linux环境基于标准外设库的项目模板
- AIR32F103(四) 27倍频216MHz,CoreMark跑分测试
- AIR32F103(五) FreeRTOSv202112核心库的集成和示例代码
- AIR32F103(六) ADC,I2S,DMA和ADPCM实现的录音播放功能
- AIR32F103(七) AIR32F103CBT6/CCT6启用96K内存
- AIR32F103(八) 集成Helix MP3解码库播放MP3
- AIR32F103(九) CAN总线的通信和ID过滤机制及实例
- AIR32F103(十) 在无系统环境和FreeRTOS环境集成LVGL
- AIR32F103(十一) 在AIR32F103上移植微雪墨水屏驱动
- AIR32F103(十二) 搭载 AIR32F103CBT6 的Bluepill核心板
搭载 AIR32F103CBT6 的Bluepill核心板
合宙说要出Bluepill已经很久了, 之前的黑色板子虽然也不错但是对于习惯STM32的同学总是有些别扭, 有几个PIN没引出而且PB12和PB14之间有电阻, 会对SPI造成干扰. 换成喜闻乐见的 Bluepill 板型后就友好多了, 一些STM32的场景也能无缝替换.
周一上架, 9.9元一片 AIR32F103CBT6 开发板搭售一片 AIR32F103CCT6 芯片, 虽然我早已经做了这个板型的 CCT6 核心板, 但是这价格没有理由不买啊, 周一下单, 快递还算给力, 今天收到了.
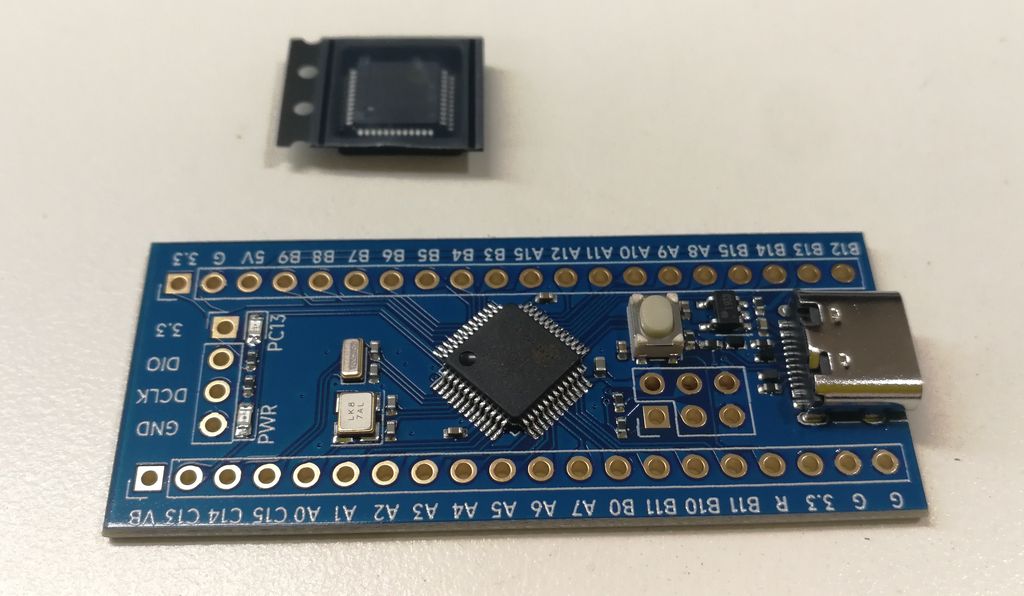
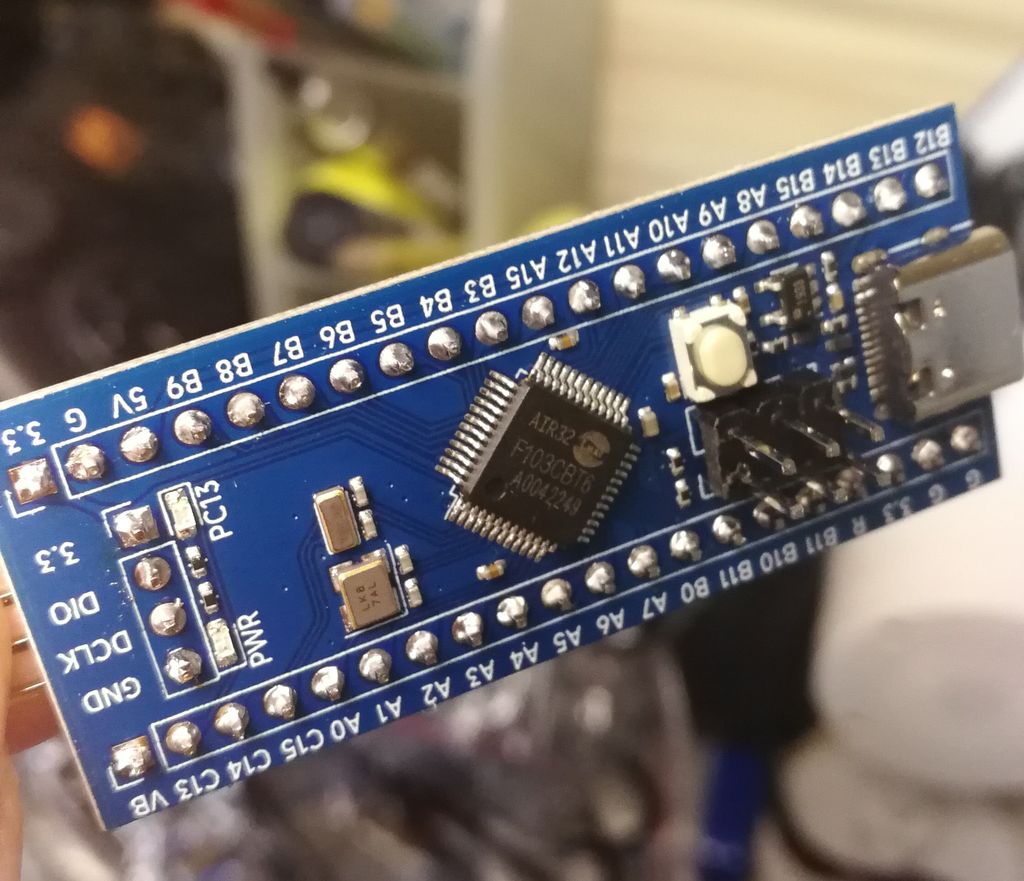
核心板正面, 上面的小黑片是 AIR32F103CCT6
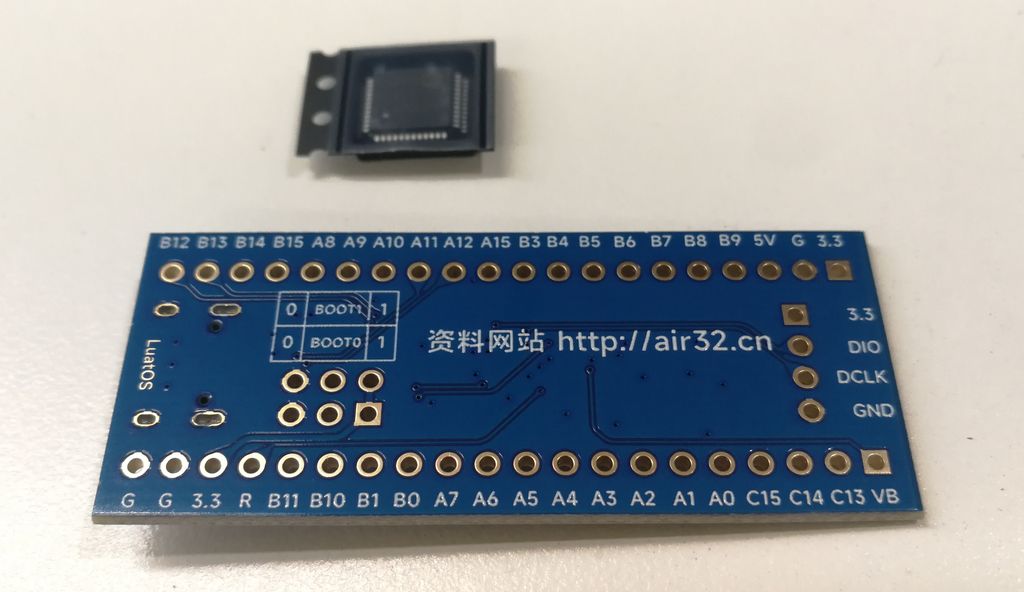
核心板反面
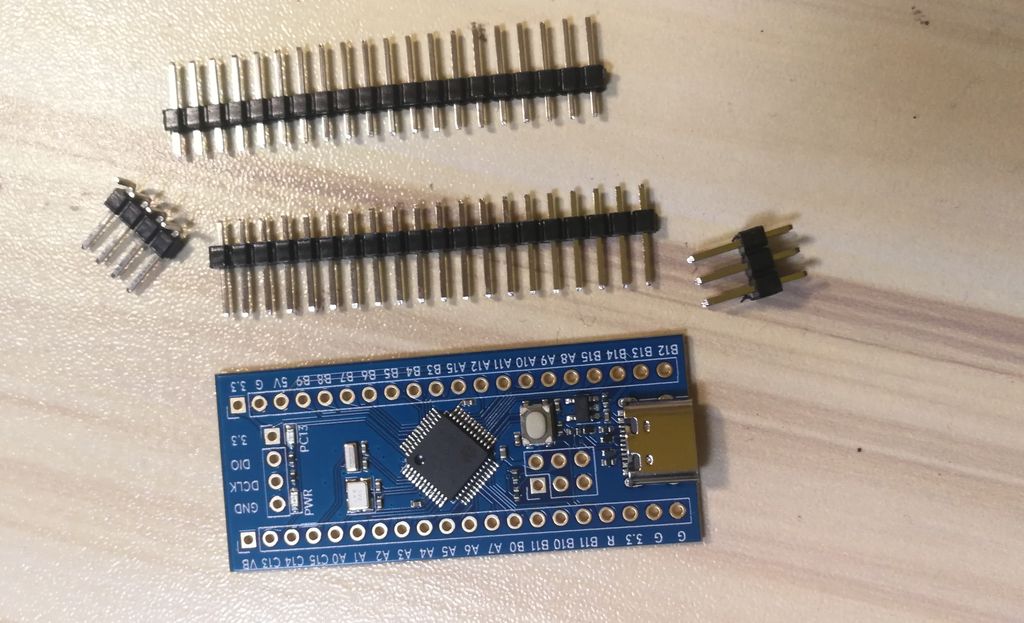
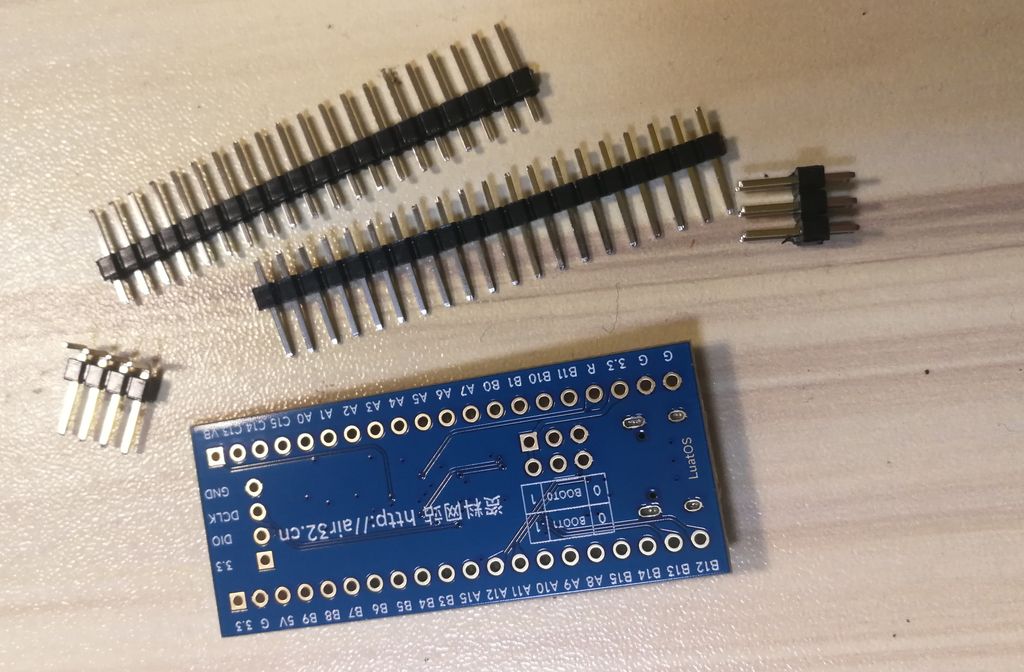
依然是送了排针, 但是没送跳线帽
背面
对核心板的简单介绍
以下的资料, 都可以从合宙的WIKI https://wiki.luatos.com/chips/air32f103/board.html 上面找到.
可以看看板子的结构和BOM: https://wiki.luatos.com/_static/bom/BluePill.html
| References | Value | Footprint | Quantity | |
|---|---|---|---|---|
| 1 | C1, C2, C3, C4 | 12p | C_0402_1005Metric | 4 |
| 2 | C6, C8, C9, C10 | 0.1uf | C_0402_1005Metric | 4 |
| 3 | C5 | 1uF | C_0402_1005Metric | 1 |
| 4 | C7 | 10uF | C_0402_1005Metric | 1 |
| 5 | R2, R3, R4, R9, R10 | 512 | R_0402_1005Metric | 5 |
| 6 | R7, R8 | 100K | R_0402_1005Metric | 2 |
| 7 | R1 | 1.5k | R_0402_1005Metric | 1 |
| 8 | R5 | 10K | R_0402_1005Metric | 1 |
| 9 | D1, D2, D3 | BDFN2C051V | DFN1006-2L | 3 |
| 10 | D4, D5 | LED | LED_0603_1608Metric | 2 |
| 11 | U1 | AIR32F103C8Tx | LQFP-48_7x7mm_P0.5mm | 1 |
| 12 | U2 | SGM2019-3.3YN5G/TR | SOT-23-5 | 1 |
| 13 | Y1 | 8M | Crystal_SMD_3225-4Pin_3.2x2.5mm | 1 |
| 14 | Y2 | 32.768K | Crystal_SMD_2012-2Pin_2.0x1.2mm_HandSoldering | 1 |
| 15 | SW1 | SW_Push | SW_SPST_PTS810 | 1 |
| 16 | JP1 | USB_C_Receptacle_USB2.0 | USB_C_Receptacle_XKB_U262-16XN-4BVC11 | 1 |
| 17 | J1, J2 | Conn_01x20 | PinHeader_1x20_P2.54mm_Vertical | 2 |
| 18 | J3 | Conn_01x04 | PinHeader_1x04_P2.54mm_Vertical | 1 |
| 19 | J4 | Conn_02x03_Odd_Even | PinHeader_2x03_P2.54mm_Vertical | 1 |
用料是不错的, SGM2019 的 LDO, 两个 BDFN2C051V (TVS), 3225 的8M晶振, 2012 的32K晶振, 都属于可选项中偏贵的.
运行测试
焊接排针之后
用 JLink 连上跑了个灯, 没什么问题.
相关链接
- 商品页: https://appc6kjfor22343.h5.xiaoeknow.com/p/decorate/homepage 这会儿活动好像还没结束
- 送的 AIR32F103CCT6, 可以用这个 https://oshwhub.com/iosetting/bluepill_copy_copy_copy_copy 在嘉立创打板

















 1364
1364

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









