







简介
HOG(Histogram of Oriented Gridients的简写)特征检测算法,最早是由法国研究员Dalal等在CVPR-2005上提出来的,一种解决人体目标检测的图像描述子,是一种用于表征图像局部梯度方向和梯度强度分布特性的描述符。其主要思想是:在边缘具体位置未知的情况下,边缘方向的分布也可以很好的表示行人目标的外形轮廓。
Dalal等提出的HOG+SVM算法,在进行行人检测取得了极大地成功后,更多新算法不断涌现,不过大都是以HOG+SVM的思路为主线。
HOG特征算法
HOG特征检测算法的几个步骤:颜色空间归一化—>梯度计算—>梯度方向直方图—>重叠块直方图归一化—>HOG特征。下面分别对其进行介绍。
1、颜色空间归一化
由于图像的采集环境、装置等因素,采集到的人脸图像效果可能不是很好,容易出现误检或漏检的情况,所以需要对采集到的人脸进行图像预处理,主要是处理光线太暗或太强的情况,这里有两次处理:图像灰度化、Gamma校正。
①图像灰度化
对于彩色图像,将RGB分量转化成灰度图像,其转化公式为:

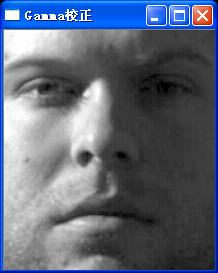
②Gamma校正
在图像照度不均匀的情况下,可以通过Gamma校正,将图像整体亮度提高或降低。在实际中可以采用两种不同的方式进行Gamma标准化,平方根、对数法。这里我们采用平方根的办法,公式如下(其中γ=0.5):
代码:
- int main()
- {
- Mat picture = imread("test.jpg", 0);//灰度
- Mat img;
- picture.convertTo(img, CV_32F); //转换成浮点
- sqrt(img, img); //gamma校正
- normalize(img, img, 0, 255, NORM_MINMAX, CV_8UC1);//归一化像素值[0,255]
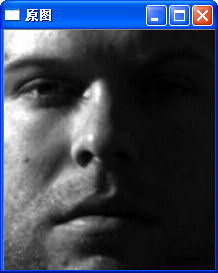
- imshow("原图", picture);
- imshow("Gamma校正", img);
- waitKey();
- return 0;
- }
结果:
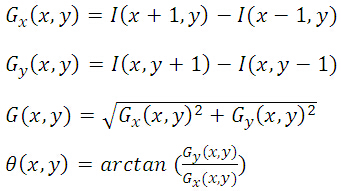
2、梯度计算
对经过颜色空间归一化后的图像,求取其梯度及梯度方向。分别在水平和垂直方向进行计算,梯度算子为:

代码:
- /*****************************************
- Copyright (c) 2015 Jingshuang Hu
- @filename:demo.cpp
- @datetime:2015.08.06
- @author:HJS
- @e-mail:eleftheria@163.com
- @blog:http://blog.csdn.net/hujingshuang
- *****************************************/
- #include <iostream>
- #include <cv.h>
- #include <opencv2/core/core.hpp>
- #include <opencv2/highgui/highgui.hpp>
- #include <opencv2/imgproc/imgproc.hpp>
- using namespace cv;
- using namespace std;
- int main()
- {
- Mat picture = imread("test.jpg", 0);//灰度
- Mat img;
- picture.convertTo(img, CV_32F); //转换成浮点
- sqrt(img, img); //gamma校正
- normalize(img, img, 0, 255, NORM_MINMAX, CV_32F);//归一化[0,255]浮点数
- Mat gradient = Mat::zeros(img.rows, img.cols, CV_32F);//梯度
- Mat theta = Mat::zeros(img.rows, img.cols, CV_32F);//角度
- for (int i = 1; i < img.rows - 1; i++)
- {
- for (int j = 1; j < img.cols - 1; j++)
- {
- float Gx, Gy;
- Gx = img.at<float>(i, j + 1) - img.at<float>(i, j - 1);
- Gy = img.at<float>(i + 1, j) - img.at<float>(i - 1, j);
- gradient.at<float>(i, j) = sqrt(Gx * Gx + Gy * Gy);//梯度模值
- theta.at<float>(i, j) = float(atan2(Gy, Gx) * 180 / CV_PI);//梯度方向[-180°,180°]
- }
- }
- normalize(gradient, gradient, 0, 255, NORM_MINMAX, CV_8UC1);//归一化[0,255] 无符号整型
- normalize(img, img, 0, 255, NORM_MINMAX, CV_8UC1);
- imshow("原图", picture);
- imshow("Gamma校正", img);
- imshow("梯度图", gradient);
- waitKey();
- return 0;
- }
结果:
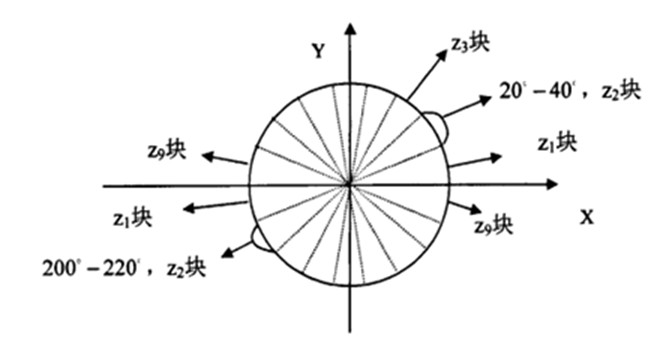
3、梯度方向直方图
将图像划分成若干个cells(单元),8x8=64个像素为一个cell,相邻的cell之间不重叠。在每个cell内统计梯度方向直方图,将所有梯度方向划分为9个bin(即9维特征向量),作为直方图的横轴,角度范围所对应的梯度值累加值作为直方图纵轴,每个bin的角度范围如下。
4、重叠块直方图归一化
【以下有关计算,请认真分析】假设有一幅图像大小为220x310,将其划分成若干个8x8的cells,显然220÷8=27.5、310÷8=38.75不是整数,也就是说划分之后依然还有多余像素不能构成cell。处理办法是将图像缩放成能被8整除的长宽(如216x304),再划分。216÷8=27,304÷8=38,因此,216x304的图像可以得到27x38个cells,没有重叠。
- Mat picture = imread("test.jpg", 0);//灰度
- resize(picture, picture, cvSize(int(picture.cols / 8) * 8, int(picture.rows / 8) * 8));//转化成能被8除尽的行、列
以上述缩放后的图像为例,共得到27x38个cell,也就是将图像划分成了27x38个单元;将上下左右相邻的2x2个cells当做一个block整体,如下所示(为方便观察,每个颜色框故意错开了一点),黑色的8x8像素为一个cell,红、蓝、黄、粉红、绿框都是一个block,即每个框内2x2的cell组成一个block。故27x38个cell可划分成26x37个block,每个block为16x16像素。相邻block之间是有重叠的,这样有效的利用了相邻像素信息,对检测结果有很大的帮助。

接下分别对每个block进行标准化,一个block内有4个cell,每个cell含9维特征向量,故每个block就由4x9=36维特征向量来表征。
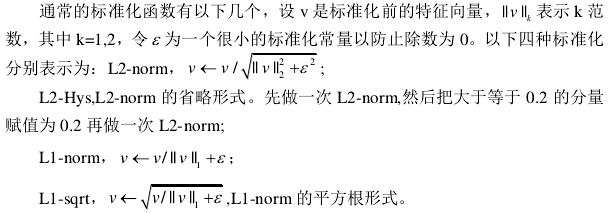
由于L2-norm简单且在检测中效果相对较好,故一般采用它。
经过上述对有重叠部分block的直方图归一化之后,将所有block的特征向量都组合起来,则形成26x37x36=34632维特征向量,这就是HOG特征,这个特征向量就可以用来表征整个图像了。
实际上,在运用的时候,我们通常是选取一幅图像中的一个窗口来进行特征提取,依然以上述220X310大小图像为例,经过缩放处理后为216x304,但并不直接提取整个图像的HOG特征,而是用一个固定大小的窗口在图像上滑动,滑动的间隔为8个像素,OpenCV中默认的窗口大小为128x64(高128,宽64),即有(128÷8)x(64÷8)=16x8个cell,也即有15x7个block,这样一来一幅图像就可以取到(27-16)x(38-8)=11x30=330个窗口。现在提取每个窗口的HOG特征,则可得到105x36=3780维HOG特征向量。
将这330个3780维的HOG特征当做测试样本,用支持向量机(SVM)分类器来判别出,这些窗口的HOG特征是否有行人,有行人的用矩形框标记起来。HOG行人特征及所对应的SVM分类器的参数,在opencv中已经训练好了,我们只需要得到HOG特征,然后调用SVM即可得到判别结果。
以上是个人对HOG算法的理解,若理解不到位或者有误的,请多多指教!
代码:
- /*****************************************
- Copyright (c) 2015 Jingshuang Hu
- @filename:demo.cpp
- @datetime:2015.08.06
- @author:HJS
- @e-mail:eleftheria@163.com
- @blog:http://blog.csdn.net/hujingshuang
- *****************************************/
- #include <iostream>
- #include <opencv2/opencv.hpp>
- using namespace cv;
- using namespace std;
- int main()
- {
- Mat image = imread("test.jpg");
- // 1. 定义HOG对象
- HOGDescriptor hog(Size(64,128),Size(16,16),Size(8,8),Size(8,8),9);//HOG检测器,用来计算HOG描述子的
- // 2. 设置SVM分类器
- hog.setSVMDetector(HOGDescriptor::getDefaultPeopleDetector()); // 采用已经训练好的行人检测分类器
- // 3. 在测试图像上检测行人区域
- vector<cv::Rect> regions;
- hog.detectMultiScale(image, regions, 0, Size(8,8), Size(32,32), 1.05, 1);
- // 显示
- for (size_t i = 0; i < regions.size(); i++)
- {
- rectangle(image, regions[i], Scalar(0,0,255), 2);
- }
- imshow("HOG行人检测", image);
- waitKey();
- return 0;
- }
结果:
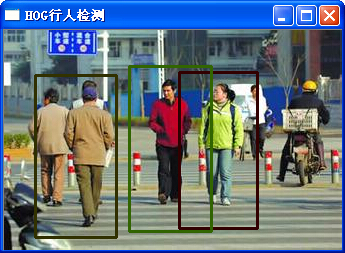
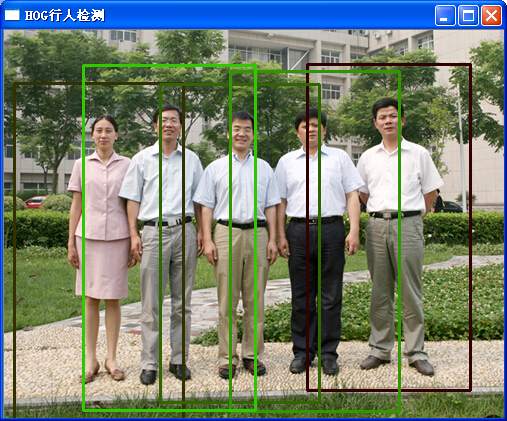
从图中可以看出,依然是有漏检的情况。
源码分析:
2、目标检测学习_1(用opencv自带hog实现行人检测)
参考资料:
1、维基百科:Histogram of oriented gradients
2、原论文:Histograms of Oriented Gradients for Human Detection
3、基于多特征的粒子滤波行人跟踪算法研究[M],张广西,2013.
4、基于HOG特征的人脸识别系统研究[M],穆春雷,2013.
5、基于HOG特征的目标识别算法研究[M],尚俊,2012.















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









