









详细介绍
机器人路径规划:基于移动机器人路径规划的Q-learning算法,可以自定义地图,修改起始点,提供MATLAB代码-CSDN博客
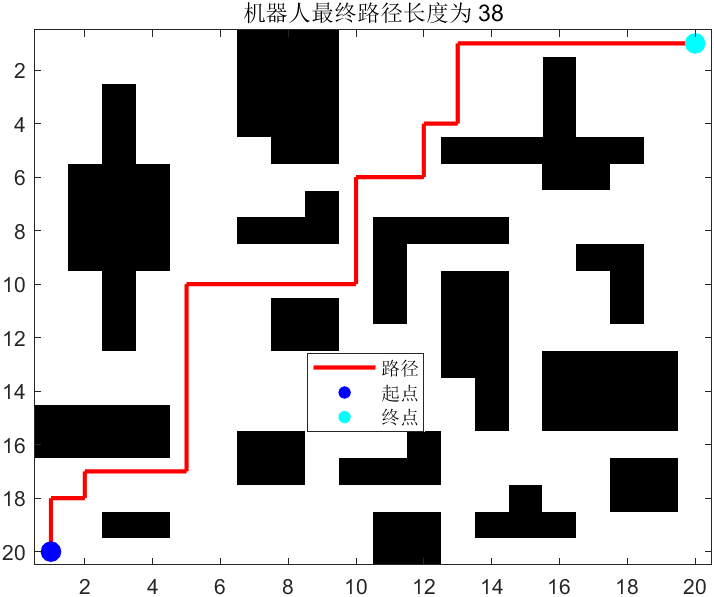
机器人最终路径:
20 1
19 1
18 1
18 2
17 2
17 3
17 4
17 5
16 5
15 5
14 5
13 5
12 5
11 5
10 5
10 6
10 7
10 8
10 9
10 10
9 10
8 10
7 10
6 10
6 11
6 12
5 12
4 12
4 13
3 13
2 13
1 13
1 14
1 15
1 16
1 17
1 18
1 19
1 20
机器人最终路径长度为 38
机器人在最终路径下的转向及移动次数为 63
完整MATLAB代码
机器人路径规划:基于Q-learning算法的移动机器人路径规划的,可以自定义地图,修改起始点,提供MATLAB代码

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









