







转载地址:http://www.csdn123.com/html/mycsdn20140110/18/1810e12f67a1c70147b5d668e8aeb935.html
--------------------------------------------------
高中数学中各种正弦函数,余弦函数总是把人搞得头大,但是具体应用时你会发现,其实你只需要搞清楚一个2π空间内函数分布即可。下面分析OpenCV中fastAtan2函数是怎么处理的方向问题。
fastAtan2函数在OpenCV中用户非常广,比如在SIFT描述子求取过程中需要计算特征点的方向,此时OpenCV的源码中就是使用的fastAtan2函数,fastAtan2函数原型如下:
float fastAtan2(float y,float x)y—向量的y坐标
输入一个2维向量,计算这个向量的方向,以度为单位(范围是0度---360度),精度是0.3度。
函数声明路径:/opencv-2.4.5/modules/core/include/opencv2/core/core.hpp
函数定义路径:/opencv-2.4.5/modules/core/src/mathfuncs.cpp
----------------------------------------------------------------------------------------------------------------------------------------------------------------
下图是OpenCV中fastAtan2函数的求解过程:
----------------------------------------------------------------------------------------------------------------------------------------------------------------
源码以及分析如下:
static const float atan2_p1 = 0.9997878412794807f*(float)(180/CV_PI);
static const float atan2_p3 = -0.3258083974640975f*(float)(180/CV_PI);
static const float atan2_p5 = 0.1555786518463281f*(float)(180/CV_PI);
static const float atan2_p7 = -0.04432655554792128f*(float)(180/CV_PI);
float fastAtan2( float y, float x )
{
float ax = std::abs(x), ay = std::abs(y);//首先不分象限,求得一个锐角角度
float a, c, c2;
if( ax >= ay )
{
c = ay/(ax + (float)DBL_EPSILON);
c2 = c*c;
a = (((atan2_p7*c2 + atan2_p5)*c2 + atan2_p3)*c2 + atan2_p1)*c;
}
else
{
c = ax/(ay + (float)DBL_EPSILON);
c2 = c*c;
a = 90.f - (((atan2_p7*c2 + atan2_p5)*c2 + atan2_p3)*c2 + atan2_p1)*c;
}
if( x < 0 )//锐角求出后,根据x和y的正负性确定向量的方向,即角度。
a = 180.f - a;
if( y < 0 )
a = 360.f - a;
return a;
}
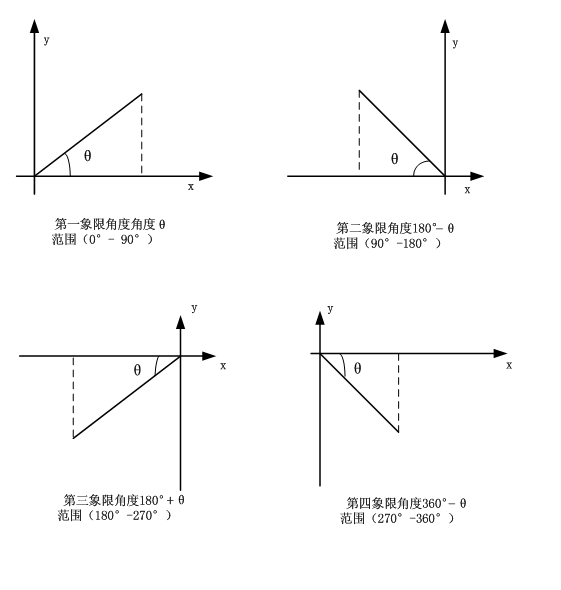
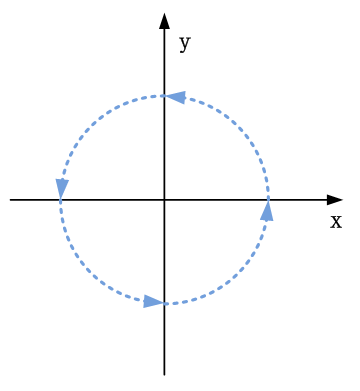
综上所述,fastAtan2函数得出的角度是以X轴正方向为0°方向,然后角度确定按照逆时针方向,以360°为终点,角度范围0°- 360°,即:
----
atan2该函数的值域为![\left ( -\pi,\pi \right ]](http://upload.wikimedia.org/math/8/4/0/8408d4ba9bd6eb98310e12bbbf13825f.png) ,可以通过对负数结果加
,可以通过对负数结果加 的方法,将函数的结果映射到
的方法,将函数的结果映射到 范围内。
范围内。
atan2值域示意图,上下都是以x轴正方向为基点
















 8581
8581











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









