







文章目录
本节内容
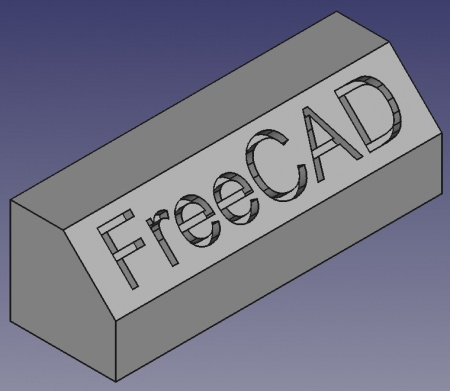
讲述3D打印中的模型,如何添加文字的雕刻效果,及FreeCAD的相关ShapeString, extrude等工具的应用技巧
利用ShapString工具雕刻文字的过程
先看利用ShapString工具挖空后效果图
然后我们再一步步往后看
创建基本形状
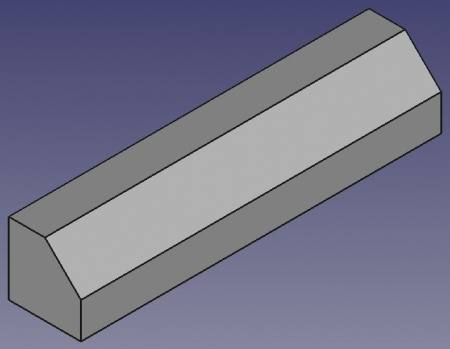
我们要先来创建一个待雕刻的立方体:
- 启动freecad创建新文档,切换至‘part’工作台
- 通过点击工具栏’create a cube solid’插入一个立方体
- 确保树视图中的立方体被选中,通过数据选项卡中的属性视图,将width改为31毫米,
现在,我们可以画一个矩形,通过选择矩形工具,点击2个角点。你可以在任何地方把两个点放下,然后对应的地方就会被放置这个矩形。 - 点击’chamfer the selected edges of a shape’,然后选择Edge6,指定‘5mm’的length后关闭’tasks’选项页
立方体的效果如下图
使用‘Draft’工作台的‘Shape String’工具来插入文本
- 切换到‘Draft’工作台
- 确保‘tree view’视图没有选中任何物体,触发工具栏上的‘Current working plane’按钮并选择XY (Top)
- 点击工具栏的‘S’型图标(Creates text string in shapes)来创建文字形状,后面一路修改输入值一面回车(Enter)往下走就行
- 接下来的输入框中,“Global X/Y/Z”均改成’0’ ,字串就填’FreeCAD’,height填5mm,tracking默认值0,字体输入框需要去选字体文件,直接去C://windows/fonts下选取自己喜爱的字体,如果不能操作那个目录可以拷贝一份出来再选取
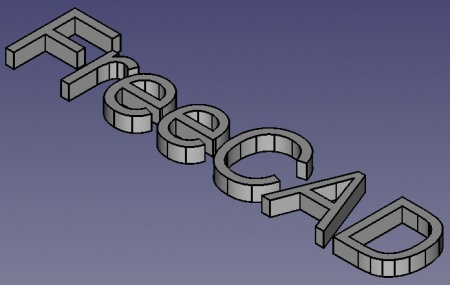
创建3D效果的文本
-
切换回part工作台
-
确保树视图中的 “Shapestring” 对象被选中(可以通过space键来切换对象的显示和隐藏来确认是否选中)
-
使用凸台工具(Extrude a selected sketch)来将文本变成3D形体,参数Along=1mmm,选中’Create a solid’项,点击‘ok’完成
插入定位用的sketch图形
-
切换至‘Sketcher’工作台
-
确定"chamfer"对象在tree view中被选中(space键控制显示和隐藏来确认)
-
选中之前‘chamfer’操作中出现的那个斜面
-
点击工具栏上的‘create a new sketch’来插入一个新的sketch,当然这个sketch是基于刚刚被选中的斜面来绘制的
-
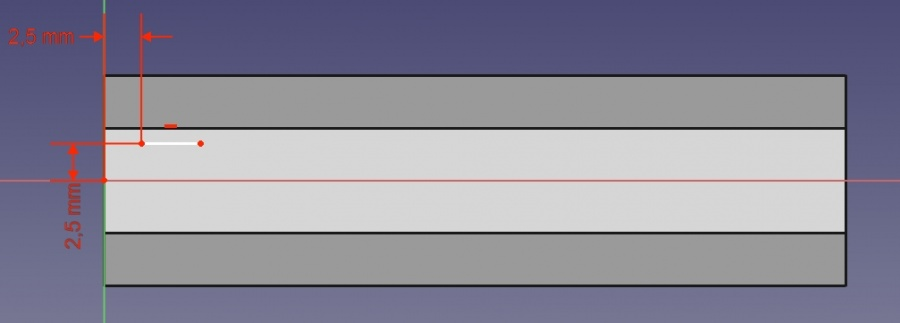
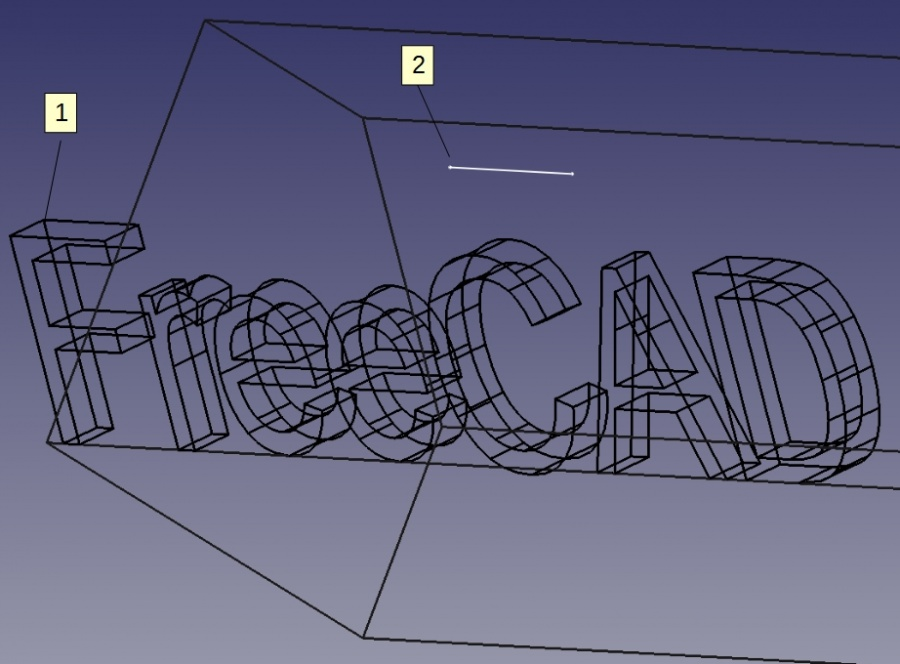
画一条横线,像下图那样 (水平的就行,长度不重要 …),然后根据下图中的示例来给定相应的距离约束
在3D空间里给3D文本进行定位
-
确保"Extrude"在tree view中被选中(space键控制显示和隐藏来确认)
-
属性中的data选项页中点击Placement项的value栏,点击’…'的按钮切换去‘Tasks’标签页去更新位置信息
-
选中Apply incremental changes to object placement项,然后Axis下拉框中设置Z=90°,Y=45°, 点击ok完成
-
切换回‘Draft’工作台,工具栏中的’Draw Style’切换到‘Wireframe’模式
-
选中"Extrude"对象,点选工具栏中的十字形的move工具,在3d视图下选中‘Etrude’对象的左上角,再点击sketch上的那个约束点,就可以完成字体对斜面的定位
创建雕刻的文本
- 切换回’Part’工作台,使用"As is"视图模式
- tree view上选中’ Chamfer’对象,然后再选中3D 文本(“Extrude”)
- 点击’‘进行布尔运算来减去文字的轮廓
- 按Space键将 “Sketch” 隐藏掉
- 一个被雕刻的斜坡长方体已经完成,效果图可以见文首的图片
后续扩展
- 再加一个补充说明,刚才我们插入的字体是英文的,如果要用中文也是可以的,只需要找到你所需要的中文字体文件加载进来,这些都可以在你已经完成的ShapeString对象属性里进行更改,马上就可以看到相应的效果出现.
- 关于FreeCAD的一些常见建模的概念及方式的主题,点击此处获取更多信息,敬请关注.
声明:文章部分内容出自英文直译,并由作者本人的亲历及经验总结,个博地址见:
http://limuqiao.com/3d/FreeCAD-zh-base-shape-string/
文章目录
OTTO机器人是什么
OTTO是完全开源的,任何人都可以做的交互式机器人. 她与Arduino控制系统兼容,其主要外观材料可以直接3d打印而来, 甚至可以说她是为培养孩子们学习机器人的热情而建造的。 OTTO的灵感来源于另一个称为Zowi的两足机器人。
元件准备
| 图片参考 | 项目 | 数量 | 购买渠道 |
|---|---|---|---|
 | Arduino or Genuino Nano V3.0 ATmega328 | 1 | Dfrobot |
 | Arduino Nano扩展板 | 1 | Dfrobot |
 | HC-SR04超声波传感器 | 1 | Dfrobot |
 | 5v无源蜂鸣器 | 4 | [Dfrobot] |
 | 母对母杜邦线 | 6 | Dfrobot |
| 5号AA电池 | 4 | Dfrobot |
| 两枚装5号电池的电池盒 | 2 | Dfrobot |
 | OTTO的外观3D打印一套 | 1 | Dfrobot |
OTTO外观打印机的说明:你可以从这里下载3d打印机的源文件自行打印,也可以找3d打印商进行打印机购买.如果自行打印,其打印设置要求:精度-0.15mm, 填充密度-20%
组装
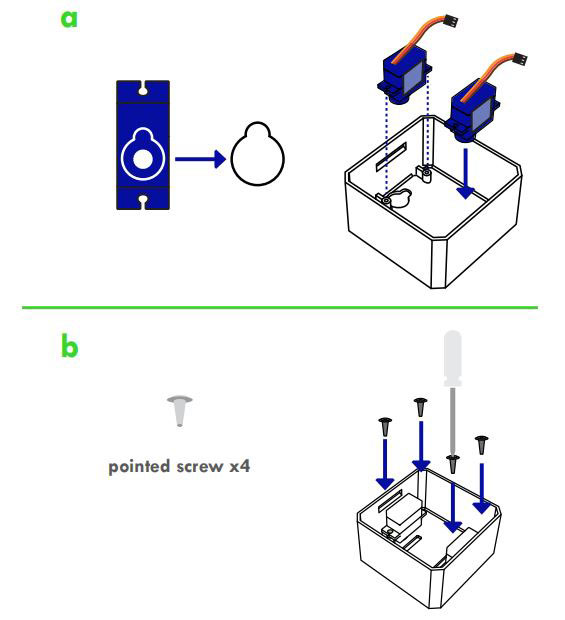
躯体部位鸵机的安装
拿来两个鸵机,按照图中所示,把他们安装到指定的位置,用螺丝刀固定好
双腿安装到躯体上
先把双腿部件连接到身体上微型鸵机处,要确保腿部相对于身体能够向左右两边各自转动90度。在对齐腿部之后用螺丝刀通过腿内部的小孔固定好.此处需注意将腿部顶端上的穿线孔与躯体下方的穿线孔靠近,使得稍后可以流畅穿线
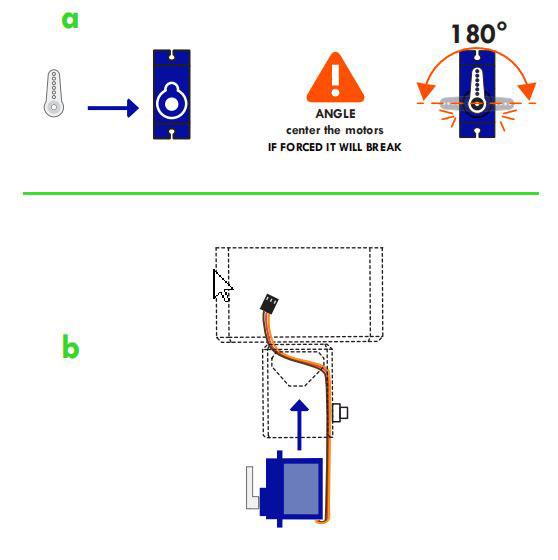
腿部鸵机的安装
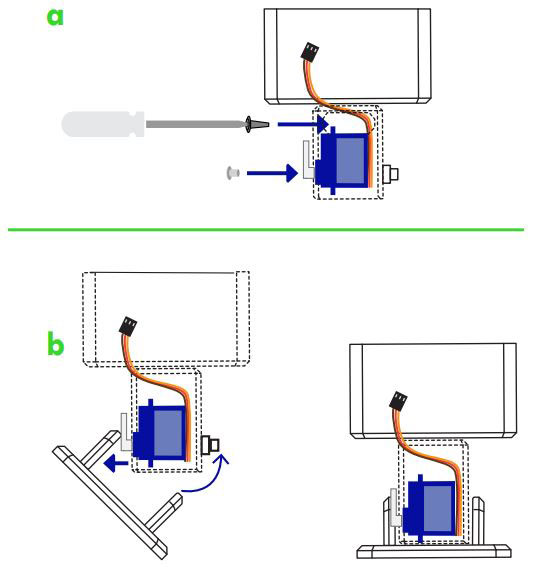
把微型鸵机放到腿部,可以把鸵机线绕几圈,然后如图示把它推进内部,并将鸵机的引线从躯体穿线孔穿出 如果困难的话,也许需要用刀清洁一下相关的区域。像检查腿部的活动方向一样,你也看下鸵机至少可以朝左右两边各旋转90度。检查后要使用小螺丝来固定它,同样地,另一只脚也是同样的步骤

双脚安装到腿部
按照图示的方式来安装,但要注意把电线放置到躯体内部的槽位并通过腿部的小孔穿出来。一旦确定好他们的位置,就可以用螺丝刀从背后固定好她们。
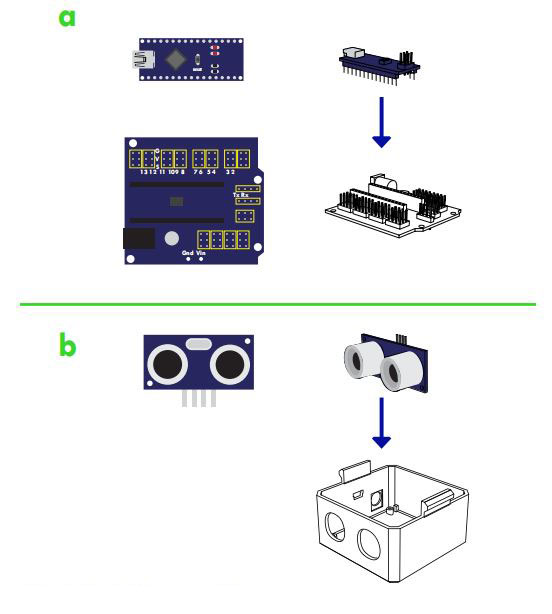
头部的组装
将超声波传感器推到眼睛的极限处,将Arduino nano安装到扩展板之后,你也可以将电池底座的线缆正极焊接到板子的Vin接线柱上,负极接到GND上。将连接好的板子,对准3d打印的头部上的USB连接口,再用至少两颗螺丝将他们固定到头部上.
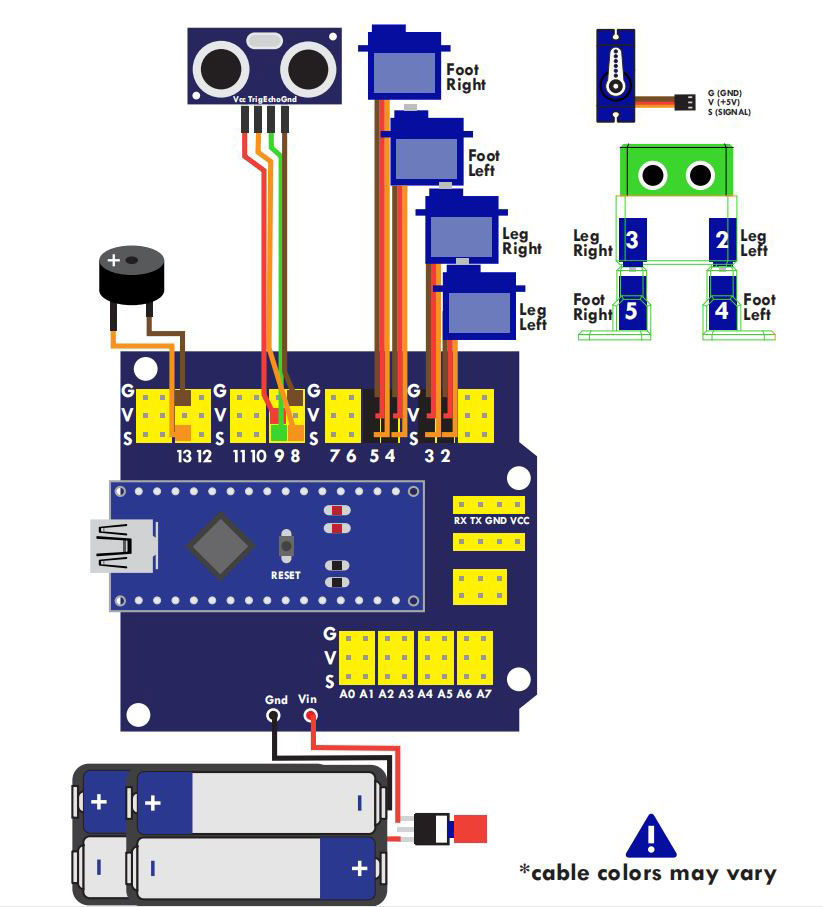
线路连接
准备好杜邦线及及蜂鸣器,根据图形所示的连接方法将各处引针连接完毕
注意
在Nano板上传代码时,碰到以下avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0x36错误,可以尝试在Arduino IDE上尝试以下操作以下菜单:
'工具- 处理器 - ATmega328P(Old Bootloader)'应该可以解决
合上头部
头部与身体有卡扣,小心地放置好线缆并合起来。
代码上传
其操作步骤如下:
1.下载并安装Arduino IDE软件
2.下载这里的lib库解压文件并复制到C:\Users\user\Documents\Arduino\libraries (或者是你安装的库文件夹所在之处):
3.通过USB线连接你的OTTO
4.打开并上传OttoDIY_smooth_criminal.ino代码到你的Arduino Nano中,之后就可以看到Otto跳舞了:)
效果演示
机器人的运动:
后续扩展
OTTO DIY还有其他各项包括蓝牙控制及其他传感器的交互(可见Ottodiy.com),后续我会加以拓展并推出其他功能供分享,敬请关注.
声明:文章部分内容出自英文直译,并由作者本人的亲历及经验总结,个博地址见:
http://tech.limuqiao.com/archives/24.html
友情关注:2021年底即将推出我们墨飞鱼团队历时大半年研发的灵感写作平台,在墨飞鱼这里希望能帮助更多人找到阅读与写作的乐趣, 敬请收藏了解,12月底见哦~

















 1215
1215

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









