







MapViz是ROS(Robot Operating System)生态系统中一款专注于2D数据可视化的强大工具,由SWRI(Southwest Research Institute)开发和维护。它为机器人导航、自动驾驶等领域提供了高效的地图数据展示平台。
项目概述
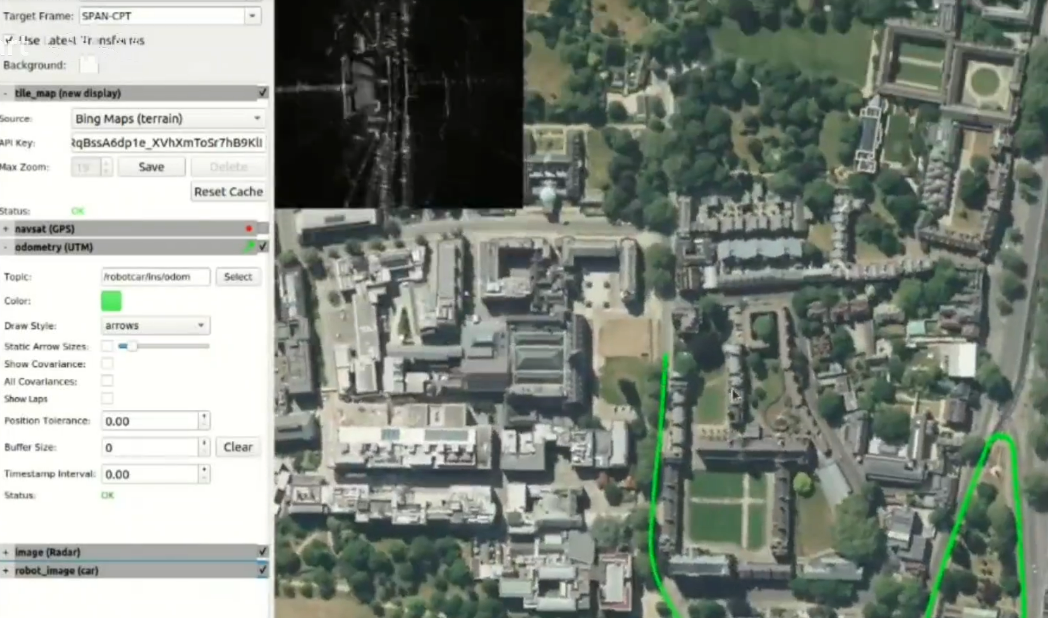
MapViz是一个模块化的ROS可视化工具,专为2D地图数据设计。它采用插件架构,允许开发者灵活地扩展功能,支持多种数据类型如GPS定位信息、激光雷达点云、摄像头图像等的实时展示。
核心特性
-
插件系统架构:
- 类似RVIZ但更专注于2D数据
- 支持开发者编写自定义插件扩展功能
- 提供丰富的预定义插件(点云显示、轨迹绘制等)
-
技术基础:
- 基于Qt和OpenGL开发,确保流畅的图形渲染
- 充分利用ROS消息系统,支持多种ROS消息类型
-
跨平台支持:
- 可在Linux、Windows和macOS上运行
- 兼容多种ROS版本(Humble, Iron, Rolling等)
-
性能优化:
- OpenGL加速渲染,处理大数据量时仍保持流畅
- 支持多分辨率图像和瓦片地图
安装与配置
安装方法
Ubuntu系统通过APT安装:
sudo apt-get install ros-$ROS_DISTRO-mapviz \
ros-$ROS_DISTRO-mapviz-plugins \
ros-$ROS_DISTRO-tile-map \
ros-$ROS_DISTRO-multires-image
从源码编译:
- 设置Catkin工作空间
- 添加源码到工作区的src目录
- 构建工作空间
基本使用
启动MapViz:
rosrun mapviz mapviz
主要功能组件
-
地图显示:
- 支持多种地图源(包括Stamen地图和天地图API)
- 可配置瓦片地图参数
-
传感器数据可视化:
- GPS/IMU数据显示
- 激光雷达点云渲染
- 摄像头图像叠加
-
路径与轨迹:
- 机器人路径记录与回放
- 导航轨迹可视化
-
插件系统:
tile_map:瓦片地图显示navsat:GPS数据显示path:路径绘制- 自定义插件开发支持
典型应用场景
-
自动驾驶测试:
- 实时展示车辆传感器数据
- 算法效果验证与调试
-
机器人导航:
- 监控路径规划和避障策略
- 环境理解可视化
-
SLAM研究:
- 同步定位与建图过程可视化
- 不同SLAM算法表现评估
-
地理信息系统:
- 结合GPS数据构建地理空间信息
- 多源地理数据融合展示
高级功能与技巧
-
使用天地图API替代默认地图:
- 申请天地图API密钥
- 修改Base URL格式适配MapViz
- 配置Custom WMTS Source
-
数据格式转换:
- 处理不兼容的GPS消息格式(如将novatel_msgs/INSPVAX转换为sensor_msgs/NavSatFix)
-
性能优化:
- 调整图像质量设置
- 合理配置缓存大小
- 按需加载地图区域
生态与集成
MapViz与ROS生态系统中的多个项目紧密集成:
mapviz_plugins:扩展插件集合multires_image:多分辨率图像支持tile_map:瓦片地图处理
最佳实践
-
视图布局设计:
- 合理安排插件位置
- 突出显示关键信息
- 使用颜色编码增强可读性
-
数据同步:
- 确保时间戳同步
- 统一坐标系
- 合理设置消息频率
-
调试技巧:
- 使用
rqt_bag配合数据回放 - 保存和加载配置预设
- 利用ROS日志系统
- 使用
与RVIZ的比较
| 特性 | MapViz | RVIZ |
|---|---|---|
| 主要用途 | 2D数据可视化 | 3D数据可视化 |
| 插件系统 | 专注于地图相关插件 | 通用机器人可视化插件 |
| 性能 | 优化过的2D渲染性能 | 全面的3D渲染支持 |
| 学习曲线 | 相对简单 | 较为复杂 |
| 适用场景 | 地图构建、路径规划 | 机器人建模、3D环境模拟 |
资源与社区
- 官方文档:GitHub项目页面提供详细文档和示例
- 教程资源:CSDN、GitCode等平台有多篇使用教程
- 社区支持:ROS官方论坛和GitHub Issues提供技术支持
安装使用视频参考:https://www.bilibili.com/video/BV1UHvKe1Ekk?spm_id_from=333.788.videopod.sections&vd_source=d87e3a479f73e137810e2d45ffc1ec5d
MapViz作为ROS生态中专注于2D可视化的工具,在机器人导航、自动驾驶等领域展现了极高的实用价值。其插件化的设计理念和优秀的性能表现,使其成为处理大规模2D地图数据的首选工具。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











