







Android中的方向传感器在生活中是一个很好的应用,典型的例子是指南针的使用,我们先来简单介绍一下传感器中三个参数x,y,z的含义,以一幅图来说明。
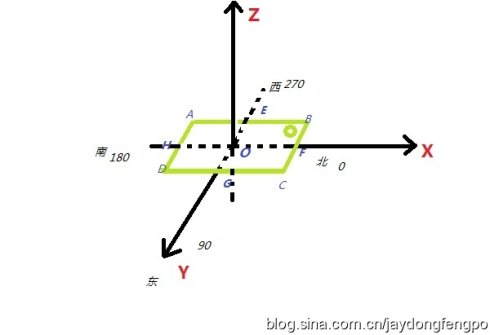
图 1
补充说明:图中的坐标轴x,y,z和传感器中的X,Y,Z没有任何联系!
如上图所示,绿色部分表示一个手机,带有小圈那一头是手机头部
传感器中的X:如上图所示,规定X正半轴为北,手机头部指向OF方向,此时X的值为0,如果手机头部指向OG方向,此时X值为90,指向OH方向,X值为180,指向OE,X值为270
传感器中的Y:现在我们将手机沿着BC轴慢慢向上抬起,即手机头部不动,尾部慢慢向上翘起来,直到AD跑到BC右边并落在XOY平面上,Y的值将从0~180之间变动,如果手机沿着AD轴慢慢向上抬起,即手机尾部不懂,直到BC跑到AD左边并且落在XOY平面上,Y的值将从0~-180之间变动,这就是方向传感器中Y的含义。
传感器中的Z:现在我们将手机沿着AB轴慢慢向上抬起,即手机左边框不动,右边框慢慢向上翘起来,直到CD跑到AB右边并落在XOY平面上,Z的值将从0~180之间变动,如果手机沿着CD轴慢慢向上抬起,即手机右边框不动,直到AB跑到CD左边并且落在XOY平面上,Z的值将从0~-180之间变动,这就是方向传感器中发Z的含义。
了解了方向传感器中X,Y,Z的含义之后下面我们就开始学习如何使用
首先我们创建一个传感器管理器和一个传感器监听器,管理器用来管理传感器以及创建各种各样的传感器,监听器用来监视传感器的变化并且进行相应的操作
private SensorManager sensorManager;
private MySensorEventListener mySensorEventListener;
mySensorEventListener= new MySensorEventListener();//这个监听器当然是我们自己定义的,在方向感应器感应到手机方向有变化的时候,我们可以采取相应的操作,这里紧紧是将x,y,z的值打印出来
private final class MySensorEventListener implements SensorEventListener{
@Override
//可以得到传感器实时测量出来的变化值
public void onSensorChanged(SensorEvent event) {
//方向传感器
if(event.sensor.getType()==Sensor.TYPE_ORIENTATION){
//x表示手机指向的方位,0表示北,90表示东,180表示南,270表示西
float x = event.values[SensorManager.DATA_X];
float y = event.values[SensorManager.DATA_Y];
float z = event.values[SensorManager.DATA_Z];
//tv_orientation是界面上的一个TextView标签,不再赘述
tv_orientation.setText("Orientation:"+x+","+y+","+z);
}
}
我们在onResume方法中创建一个方向传感器,并向系统注册监听器
protected void onResume() {
Sensor sensor_orientation=sensorManager.getDefaultSensor(Sensor.TYPE_ORIENTATION);
sensorManager.registerListener(mySensorEventListener,sensor_orientation, SensorManager.SENSOR_DELAY_UI);
super.onResume();
}
最后我们在onPause()中注销所有传感器的监听,释放方向感应器资源!
protected void onPause() {
//注销所有传感器的监听
sensorManager.unregisterListener(mySensorEventListener);
super.onPause();
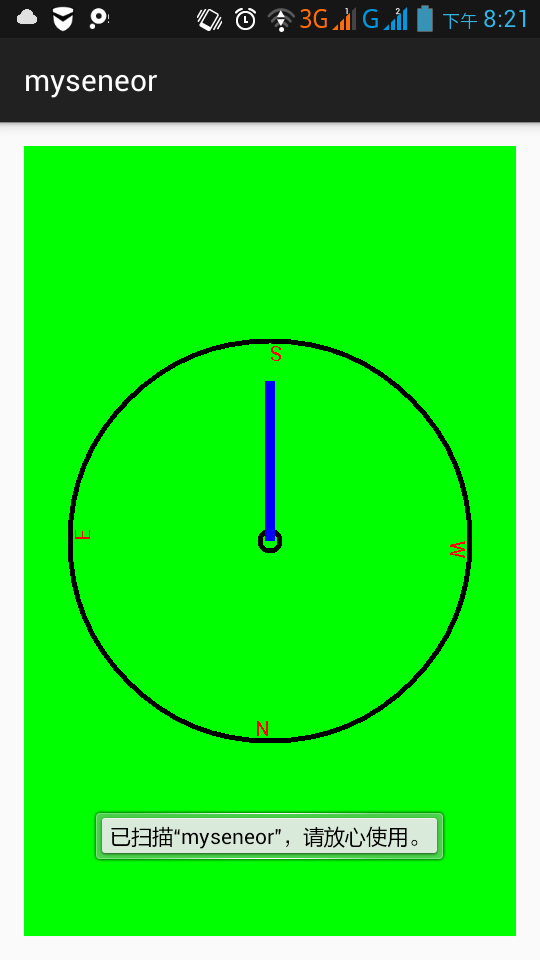
}下面制作一个简单的指南针:
1、写一个MyView类继承SurfaceView
public class MyView extends SurfaceView implements SurfaceHolder.Callback{
//继承SurfaceView 插入构造器
private int width;
private int height;
private Paint mPaintCircle;
private Paint mPaintText;
private Paint mPaintLine;
private String[] sensor = {"W", "N","E","S"};
private Float degree;//角度
private boolean work = true;
//对degree插入setter和getter方法
public void setDegree(Float degree) {
this.degree = degree;
}
public Float getDegree() {
return degree;
}
//两个构造器
public MyView(Context context) {
super(context);
}
public MyView(Context context, AttributeSet attrs) {
super(context, attrs);
SurfaceHolder holder = getHolder();//得到holder
holder.addCallback(this);//绑定holder的回
mPaintCircle = new Paint();
mPaintCircle.setColor(Color.BLACK);
mPaintCircle.setStyle(Paint.Style.STROKE);
mPaintCircle.setStrokeWidth(5);
mPaintText = new Paint();
mPaintText.setColor(Color.RED);
mPaintText.setStrokeWidth(10);
mPaintText.setTextSize(20);
mPaintLine = new Paint();
mPaintLine.setColor(Color.GREEN);
mPaintLine.setStrokeWidth(10);
}
@Override
protected void onMeasure(int widthMeasureSpec, int heightMeasureSpec) {
super.onMeasure(widthMeasureSpec, heightMeasureSpec);
width = getDefaultSize(getSuggestedMinimumWidth(), widthMeasureSpec);
height = getDefaultSize(getSuggestedMinimumHeight(), heightMeasureSpec);
}
// implements SurfaceHolder.Callback后实现下面的三个方法
@Override
public void surfaceCreated(final SurfaceHolder holder) {
//启动线程
new Thread(new Runnable() {
@Override
public void run() {
while (work) {
Canvas canvas = holder.lockCanvas();
//接下来绘制东西,相当于onDrawn()方法
canvas.drawColor(Color.GRAY);
canvas.drawCircle(width / 2, height / 2, 200, mPaintCircle);
canvas.drawCircle(width / 2, height / 2, 10, mPaintCircle);
for (int i = 1; i <= sensor.length; i++) {//用FOR循环画12条短线
canvas.save();//保存画布当前的状态
canvas.rotate(360 / 4 * i+degree, width / 2, height / 2);//旋转画布,每次转90度
canvas.drawText("" + sensor[i - 1], width / 2, height / 2 - 180, mPaintText);
canvas.restore();
}
canvas.save();
canvas.rotate(degree, width / 2, height / 2);//从activity中得到旋转的角度
canvas.drawLine(width / 2, height / 2, width / 2, height / 2 - 160, mPaintLine);
canvas.restore();
holder.unlockCanvasAndPost(canvas);
try {
Thread.sleep(40);
} catch (InterruptedException e) {
e.printStackTrace();
}
}
}
}).start();
}
@Override
public void surfaceChanged(SurfaceHolder holder, int format, int width, int height) {
holder.setFixedSize(this.width,this.height);
}
@Override
public void surfaceDestroyed(SurfaceHolder holder) {
work = false;
}
}
2、在布局文件中声明MyView
<com.my.administrator.myseneor.MyView
android:id="@+id/view"
android:layout_width="match_parent"
android:layout_height="match_parent" />3、 MainActivity
public class MainActivity extends AppCompatActivity {
private SensorManager sensorManager;
private MyView myView;
private float degree;
float[] acceleromoterValues = new float[3];//加速度传感器的三个值
float[] magneticValues = new float[3];//地磁传感器的三个值
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
myView = (MyView) findViewById(R.id.view);
sensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE);//获得sensorManager的实例,sensorManager是所有传感器的管理器,有了它之后就可以调用getDefaultSensor方法得到任意的传感器类型了。
Sensor magegeticSensor = sensorManager.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD);
Sensor accelerometerSensor = sensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
//调用registerListener方法注册才能生效
sensorManager.registerListener(listener, magegeticSensor, SensorManager.SENSOR_DELAY_GAME);
sensorManager.registerListener(listener, accelerometerSensor, SensorManager.SENSOR_DELAY_GAME);
}
@Override
protected void onDestroy() {
super.onDestroy();
if (sensorManager != null) {
sensorManager.unregisterListener(listener);
}
}
private SensorEventListener listener = new SensorEventListener() {
@Override
public void onSensorChanged(SensorEvent event) {
//判断当前是加速度传感器还是地磁传感器
if (event.sensor.getType() == Sensor.TYPE_ACCELEROMETER) {
//注意赋值时要调用clone()方法
acceleromoterValues = event.values.clone();
} else if (event.sensor.getType() == Sensor.TYPE_MAGNETIC_FIELD) {
magneticValues = event.values.clone();
}
float[] R = new float[9];
float[] values = new float[3];
SensorManager.getRotationMatrix(R, null, acceleromoterValues, magneticValues);
SensorManager.getOrientation(R, values);
//第一个values的值就是手机旋转的角度
Log.d("MainActivity", "values[0] is" + Math.toDegrees(values[0]));
degree = (float)-Math.toDegrees(values[0]);
Log.d("MainActivity", "这里指针转过了" + degree);
myView.setDegree(degree);//通过setDegree方法将角度传到myview中去,然后指针相应偏转
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
}
};
}















 996
996

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









