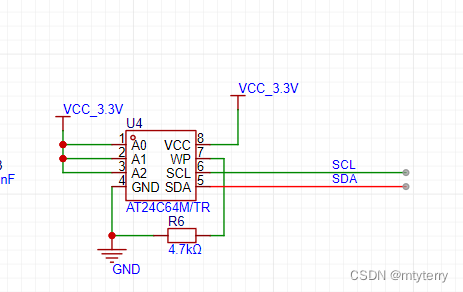
一、AT24C64电路图
二、程序编码
1.定义I2C总线连接的GPIO端口
/* 定义I2C总线连接的GPIO端口, 用户只需要修改下面4行代码即可任意改变SCL和SDA的引脚 */
#define RCC_I2C_PORT SysctrlPeripheralGpio /* GPIO端口时钟 */
#define PORT_I2C_SCL GpioPortA /* GPIO端口 */
#define PIN_I2C_SCL GpioPin8 /* GPIO引脚 */
#define PORT_I2C_SDA GpioPortB /* GPIO端口 */
#define PIN_I2C_SDA GpioPin15 /* GPIO引脚 */
#define I2C_SCL_PIN GpioPin8 /* 连接到SCL时钟线的GPIO */
#define I2C_SDA_PIN GpioPin15 /* 连接到SDA数据线的GPIO */
/* 定义读写SCL和SDA的宏 */
#define I2C_SCL_1() Gpio_WriteOutputIO(PORT_I2C_SCL, PIN_I2C_SCL, TRUE) /* SCL = 1 */
#define I2C_SCL_0() Gpio_WriteOutputIO(PORT_I2C_SCL, PIN_I2C_SCL, FALSE) /* SCL = 0 */
#define I2C_SDA_1() Gpio_WriteOutputIO(PORT_I2C_SDA, PIN_I2C_SDA, TRUE) /* SDA = 1 */
#define I2C_SDA_0() Gpio_WriteOutputIO(PORT_I2C_SDA, PIN_I2C_SDA, FALSE) /* SDA = 0 */
#define I2C_SDA_READ() (Gpio_GetInputIO(PORT_I2C_SDA,I2C_SDA_PIN) != 0) /* 读SDA口线状态 */
#define I2C_SCL_READ() (Gpio_GetInputIO(PORT_I2C_SCL,I2C_SCL_PIN) != 0) /* 读SCL口线状态 */
2.HC32L130的GPIO模拟I2C总线程序
/*
*********************************************************************************************************
* 函 数 名: bsp_InitI2C
* 功能说明: 配置I2C总线的GPIO,采用模拟IO的方式实现
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
#define I2C_WR 0 /* 写控制bit */
#define I2C_RD 1 /* 读控制bit */
void App_InitI2C(void)
{
InitSCLOutput();
InitSDAOutput();
/* 给一个停止信号, 复位I2C总线上的所有设备到待机模式 */
i2c_Stop();
}
void InitSDAInput(void)
{
stc_gpio_cfg_t GpioInitStruct;
DDL_ZERO_STRUCT(GpioInitStruct);
//使能GPIO外设时钟
Sysctrl_SetPeripheralGate(SysctrlPeripheralGpio, TRUE);
///< 端口方向配置->输入
GpioInitStruct.enDir = GpioDirIn;
///< 端口驱动能力配置->高驱动能力
GpioInitStruct.enDrv = GpioDrvL;
///< 端口上下拉配置->无上下拉
GpioInitStruct.enPu = GpioPuDisable; ///< 端口上下拉配置->无
GpioInitStruct.enPd = GpioPdDisable;
///< 端口开漏输出配置->开漏输出关闭
// GpioInitStruct.enOD = GpioOdEnable;
///< 端口输入/输出值寄存器总线控制模式配置->AHB
GpioInitStruct.enCtrlMode = GpioAHB;
Gpio_Init(PORT_I2C_SDA,PIN_I2C_SDA,&GpioInitStruct); ///< 端口初始化
}
void InitSDAOutput(void)
{
stc_gpio_cfg_t GpioInitStruct;
DDL_ZERO_STRUCT(GpioInitStruct);
//使能GPIO外设时钟
Sysctrl_SetPeripheralGate(SysctrlPeripheralGpio, TRUE);
///< 端口方向配置->输入
GpioInitStruct.enDir = GpioDirOut;
///< 端口驱动能力配置->高驱动能力
GpioInitStruct.enDrv = GpioDrvH;
///< 端口上下拉配置->无上下拉
GpioInitStruct.enPu = GpioPuDisable; ///< 端口上下拉配置->无
GpioInitStruct.enPd = GpioPdDisable;
///< 端口开漏输出配置->开漏输出关闭
GpioInitStruct.enOD = GpioOdEnable;
///< 端口输入/输出值寄存器总线控制模式配置->AHB
GpioInitStruct.enCtrlMode = GpioAHB;
Gpio_Init(PORT_I2C_SDA, PIN_I2C_SDA, &GpioInitStruct);
Gpio_WriteOutputIO(PORT_I2C_SDA, PIN_I2C_SDA, TRUE);
}
void InitSCLOutput(void)
{
stc_gpio_cfg_t GpioInitStruct;
DDL_ZERO_STRUCT(GpioInitStruct);
//使能GPIO外设时钟
Sysctrl_SetPeripheralGate(SysctrlPeripheralGpio, TRUE);
///< 端口方向配置->输入
GpioInitStruct.enDir = GpioDirOut;///
GpioInitStruct.enDrv = GpioDrvH;///< 端口驱动能力配置->高驱动能力
GpioInitStruct.enPu = GpioPuDisable; ///< 端口上下拉配置->无
GpioInitStruct.enPd = GpioPdDisable;
///< 端口开漏输出配置->开漏输出关闭
GpioInitStruct.enOD = GpioOdDisable;
GpioInitStruct.enCtrlMode = GpioAHB;///< 端口输入/输出值寄存器总线控制模式配置->AHB
Gpio_Init(PORT_I2C_SCL, PIN_I2C_SCL, &GpioInitStruct);
Gpio_WriteOutputIO(PORT_I2C_SCL, PIN_I2C_SCL, TRUE);
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Delay
* 功能说明: I2C总线位延迟,最快400KHz
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void i2c_Delay(void)
{
uint8_t i;
/*
CPU主频168MHz时,在内部Flash运行, MDK工程不优化。用台式示波器观测波形。
循环次数为5时,SCL频率 = 1.78MHz (读耗时: 92ms, 读写正常,但是用示波器探头碰上就读写失败。时序接近临界)
循环次数为10时,SCL频率 = 1.1MHz (读耗时: 138ms, 读速度: 118724B/s)
循环次数为30时,SCL频率 = 440KHz, SCL高电平时间1.0us,SCL低电平时间1.2us
上拉电阻选择2.2K欧时,SCL上升沿时间约0.5us,如果选4.7K欧,则上升沿约1us
实际应用选择400KHz左右的速率即可
*/
for (i = 0; i < 3; i++);
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Start
* 功能说明: CPU发起I2C总线启动信号
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_Start(void)
{
/* 当SCL高电平时,SDA出现一个下跳沿表示I2C总线启动信号 */
I2C_SDA_1();
I2C_SCL_1();
i2c_Delay();
I2C_SDA_0();
i2c_Delay();
I2C_SCL_0();
i2c_Delay();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Start
* 功能说明: CPU发起I2C总线停止信号
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_Stop(void)
{
/* 当SCL高电平时,SDA出现一个上跳沿表示I2C总线停止信号 */
I2C_SDA_0();
i2c_Delay();
I2C_SCL_1();
i2c_Delay();
I2C_SDA_1();
i2c_Delay();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_SendByte
* 功能说明: CPU向I2C总线设备发送8bit数据
* 形 参: _ucByte : 等待发送的字节
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_SendByte(uint8_t _ucByte)
{
uint8_t i;
/* 先发送字节的高位bit7 */
for (i = 0; i < 8; i++)
{
if (_ucByte & 0x80)
{
I2C_SDA_1();
}
else
{
I2C_SDA_0();
}
i2c_Delay();
I2C_SCL_1();
i2c_Delay();
I2C_SCL_0();
if (i == 7)
{
I2C_SDA_1(); // 释放总线
}
_ucByte <<= 1; /* 左移一个bit */
i2c_Delay();
}
}
/*
*********************************************************************************************************
* 函 数 名: i2c_ReadByte
* 功能说明: CPU从I2C总线设备读取8bit数据
* 形 参: 无
* 返 回 值: 读到的数据
*********************************************************************************************************
*/
uint8_t i2c_ReadByte(void)
{
uint8_t i;
uint8_t value;
/* 读到第1个bit为数据的bit7 */
value = 0;
for (i = 0; i < 8; i++)
{
value <<= 1;
I2C_SCL_1();
i2c_Delay();
if (I2C_SDA_READ())
{
value++;
}
I2C_SCL_0();
i2c_Delay();
}
return value;
}
/*
*********************************************************************************************************
* 函 数 名: i2c_WaitAck
* 功能说明: CPU产生一个时钟,并读取器件的ACK应答信号
* 形 参: 无
* 返 回 值: 返回0表示正确应答,1表示无器件响应
*********************************************************************************************************
*/
uint8_t i2c_WaitAck(void)
{
uint8_t re;
I2C_SDA_1(); /* CPU释放SDA总线 */
i2c_Delay();
I2C_SCL_1(); /* CPU驱动SCL = 1, 此时器件会返回ACK应答 */
i2c_Delay();
if (I2C_SDA_READ()) /* CPU读取SDA口线状态 */
{
re = 1;
}
else
{
re = 0;
}
I2C_SCL_0();
i2c_Delay();
return re;
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Ack
* 功能说明: CPU产生一个ACK信号
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_Ack(void)
{
I2C_SDA_0(); /* CPU驱动SDA = 0 */
i2c_Delay();
I2C_SCL_1(); /* CPU产生1个时钟 */
i2c_Delay();
I2C_SCL_0();
i2c_Delay();
I2C_SDA_1(); /* CPU释放SDA总线 */
}
/*
*********************************************************************************************************
* 函 数 名: i2c_NAck
* 功能说明: CPU产生1个NACK信号
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void i2c_NAck(void)
{
I2C_SDA_1(); /* CPU驱动SDA = 1 */
i2c_Delay();
I2C_SCL_1(); /* CPU产生1个时钟 */
i2c_Delay();
I2C_SCL_0();
i2c_Delay();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_CheckDevice
* 功能说明: 检测I2C总线设备,CPU向发送设备地址,然后读取设备应答来判断该设备是否存在
* 形 参: _Address:设备的I2C总线地址
* 返 回 值: 返回值 0 表示正确, 返回1表示未探测到
*********************************************************************************************************
*/
uint8_t i2c_CheckDevice(uint8_t _Address)
{
uint8_t ucAck;
if (I2C_SDA_READ() && I2C_SCL_READ())
{
i2c_Start(); /* 发送启动信号 */
/* 发送设备地址+读写控制bit(0 = w, 1 = r) bit7 先传 */
i2c_SendByte(_Address | I2C_WR);
ucAck = i2c_WaitAck(); /* 检测设备的ACK应答 */
i2c_Stop(); /* 发送停止信号 */
return ucAck;
}
return 1; /* I2C总线异常 */
}
3.AT24C64读写程序
include "app_at24c64.h"
#include "gpio.h"
#include "app_i2c_gpio.h"
void App_AT24C64Init(void){
App_InitI2C();
}
/*
*********************************************************************************************************
* 函 数 名: ee_ReadBytes
* 功能说明: 从串行EEPROM指定地址处开始读取若干数据
* 形 参: _usAddress : 起始地址
* _usSize : 数据长度,单位为字节
* _pReadBuf : 存放读到的数据的缓冲区指针
* 返 回 值: 0 表示失败,1表示成功
*********************************************************************************************************
*/
uint8_t App_x24c64_readbuff(uint8_t *_pReadBuf, uint16_t _usAddress, uint16_t _usSize)
{
uint16_t i;
i2c_Start();
i2c_SendByte(EE_DEV_ADDR | I2C_WR); /* 此处是写指令 */
i2c_WaitAck();
i2c_SendByte((uint8_t)(_usAddress >> 8));
i2c_WaitAck();
i2c_SendByte((uint8_t)(_usAddress& 0x00FF));
i2c_WaitAck();
i2c_Start();
i2c_SendByte(EE_DEV_ADDR | I2C_RD); /* 此处是读指令 */
i2c_WaitAck();
for (i = 0; i < _usSize; i++)
{
_pReadBuf[i] = i2c_ReadByte();
if (i != _usSize - 1)
{
i2c_Ack();
}
else
{
i2c_NAck();
}
}
i2c_Stop();
return 0;
}
/*
*********************************************************************************************************
* 函 数 名: App_x24c64_writebuf
* 功能说明: 向串行EEPROM指定地址写入若干数据,采用页写操作提高写入效率
* 形 参: _usAddress : 起始地址
* _usSize : 数据长度,单位为字节
* _pWriteBuf : 存放读到的数据的缓冲区指针
* 返 回 值: 0 表示失败,1表示成功
*********************************************************************************************************
*/
void App_x24c64_writebuf(uint8_t *_pWriteBuf, uint16_t _usAddress, uint16_t _usSize)
{
uint16_t i;
i2c_Start();
i2c_SendByte(EE_DEV_ADDR | I2C_WR); /* 此处是写指令 */
i2c_WaitAck();
i2c_SendByte((uint8_t)(_usAddress >> 8));
i2c_WaitAck();
i2c_SendByte((uint8_t)(_usAddress& 0x00FF));
i2c_WaitAck();
for(i=0;i<_usSize;i++){
i2c_SendByte(_pWriteBuf[i]);
i2c_WaitAck();
}
i2c_Stop();
}
void App_x24c64_writeOnePage(unsigned char *buffer,uint16_t addr,unsigned char len){
unsigned char i=0;
if(len>32)len=32;
App_x24c64_writebuf(buffer,addr,len);
delay10us(500);
}
void App_x24c64_writebuff(uint8_t *buffer, uint16_t addr, int num)
{
uint8_t NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0, temp = 0;
Addr = addr % 32;/*不满一页的开始写的地址*/
count = 32 - Addr;/*不满一页的地址剩余容量*/
NumOfPage = num / 32;/*写了完整的页数*/
NumOfSingle = num % 32;/*写完完整页剩余的容量*/
/* 写进的地址是在页的首地址 */
if(Addr == 0){
/*写进的字节数不足一页*/
if(NumOfPage == 0)
App_x24c64_writeOnePage(buffer, addr, NumOfSingle);
/*写进的字节数大于一页*/
else{
while(NumOfPage--){
// printf("NumOfPage=%d\r\n",NumOfPage);
App_x24c64_writeOnePage(buffer, addr, 32 ); /*写一页*/
addr += 32 ;
buffer+= 32 ;
}/*写完整页*/
// printf("NumOfSingle=%d\r\n",NumOfSingle);
if(NumOfSingle!=0){/*写尾数*/
App_x24c64_writeOnePage(buffer, addr, NumOfSingle);
}
}
} /* 假如写进的地址不在页的首地址*/
else {
if (NumOfPage == 0) {/*写进的字节数不足一页 */
if (NumOfSingle > count){
/*要写完完整页剩余的容量大于不满一页的地址剩余容量*/
temp = NumOfSingle - count;
App_x24c64_writeOnePage(buffer, addr, count);/*把当前页的地址写完*/
addr += count;
buffer += count;
App_x24c64_writeOnePage(buffer, addr, temp);/*在新的一页写剩余的字节*/
}
else
{
App_x24c64_writeOnePage(buffer, addr, num);
}
}
else{ /*写进的字节数大于一页*/
num -= count;
NumOfPage = num / 32;
NumOfSingle = num % 32;
App_x24c64_writeOnePage(buffer, addr, count);/*把当前页的地址写完*/
addr += count;
buffer += count;
while (NumOfPage--)
{
App_x24c64_writeOnePage(buffer, addr, 32);
addr += 32;
buffer += 32;
}
if (NumOfSingle != 0)
{
App_x24c64_writeOnePage(buffer, addr, NumOfSingle);
}
}
}
}
4.测试程序
#include <stdio.h>
#include <stdint.h>
#include "app_RS485.h"
#include "app_at24c64.h"
#include "app_i2c_gpio.h"
void App_x24c64_test();
/**
******************************************************************************
** \brief Main function of project
**
** \return uint32_t return value, if needed
**
** This sample
**
******************************************************************************/
unsigned char level_f[8]={0x01,0x03,0x00,0x02,0x00,0x02,0x65,0xCB};//测量值浮点型输出
extern uint8_t u8RxCnt;
extern uint8_t level_fv[10];
int32_t main(void)
{
App_AT24C64Init();
App_RS485Init(9600);
// app_RS485Sendbuff(level_f,8);
App_x24c64_test();
while(1)
{
delay1ms(100);
if(g_RS485.RxFlag==1){
app_RS485Sendbuff(g_RS485.Rxbuff,g_RS485.RxCnt);
}
}
}
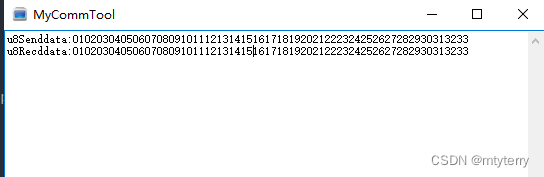
void App_x24c64_test(){
uint8_t u8Senddata[33] = {0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08,0x09,0x10,0x11,0x12,0x13,0x14,0x15,0x16,0x17,0x18,0x19,0x20,0x21,0x22,0x23,0x24,0x25,0x26,0x27,0x28,0x29,0x30,0x31,0x32,0x33};
uint8_t u8Recdata[33]={0x00};
int32_t temp;
uint8_t i=0;
App_x24c64_writebuff(u8Senddata,0,33);
printf("u8Senddata:");
for(temp=0;temp<33;temp++){
printf("%02X",u8Senddata[temp]);
}
delay1ms(100);
App_x24c64_readbuff(u8Recdata,0,33);
printf("\r\nu8Recddata:");
for(temp=0;temp<33;temp++){
printf("%02X",u8Recdata[temp]);
}
}
5.测试结果





















 2494
2494

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









