









简介
FreeRTOS里面的线程叫任务,使用TCB(Task Control Block)来描述一个任务,每个任务有自己的栈空间。线程和线程调度是每一个操作系统里面相当关键的技术,本文通过FreeRTOS这个内核来阐述这两个知识点。
线程创建
每一个线程在创建的时候(xTaskGenericCreate)需要分配两个memory
一块memory是用来表示TCB,另外一块是用于新创建线程的栈。
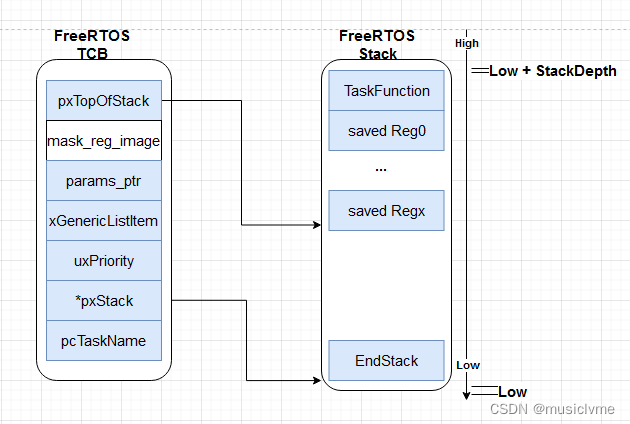
pxTopOfStack:指向栈顶
pxStack:指向栈底
uxPriority:线程优先级,Freertos里面是值越大,优先级越高
xGenericListItem:双向链表
params_ptr:线程运行函数的参数
pcTaskName:线程名字
TaskFunction:线程执行函数
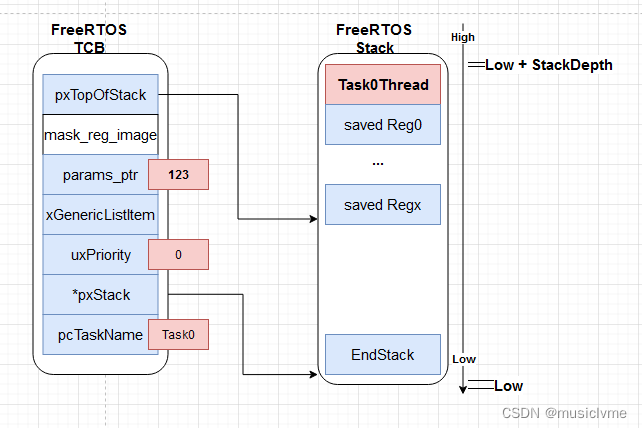
线程创建示例
例如:现在要创建一个名字叫“Task0”的Task0Thread线程,Task0Thread的参数为123,优先级为0,那么TCB和Stack的信息就会如下图所示:
线程调度
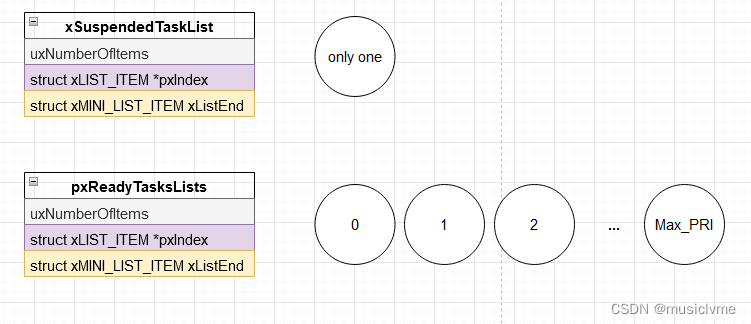
- 调度链表
FreeRTOS里面有两个关键的双向链表来保存上面提到的线程TCB,一个是pxReadyTasksLists[Max_PRI](Max_PRI是FreeRTOS里面定义的最大优先级,不同优先级的线程保存在不同的链表里面),另外一个是xSuspendedTaskList(这个只有一个链表,没有区分优先级)。所以可以看到pxReadyTasksLists根据FreeRTOS的最大优先级有一个双向链表数组,而保存挂起线程的链表只有一个。
- 调度时机
线程被创建后,不是立马就会运行,需要等待所有的线程创建好后,最后执行调度器根据调度策略从pxReadyTasksLists池选择一个线程来运行,流程如下:

- 调度策略
线程调度会根据优先级或是运行时长,来从pxReadyTasksLists里面选择一个最佳的线程来赋值给PC进行执行。下面根据最简单的基于线程优先级来分析调度流程。下面两幅图给出了创建两个相同优先级和不同优先级的线程流程图。
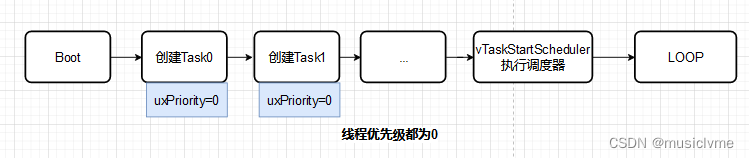
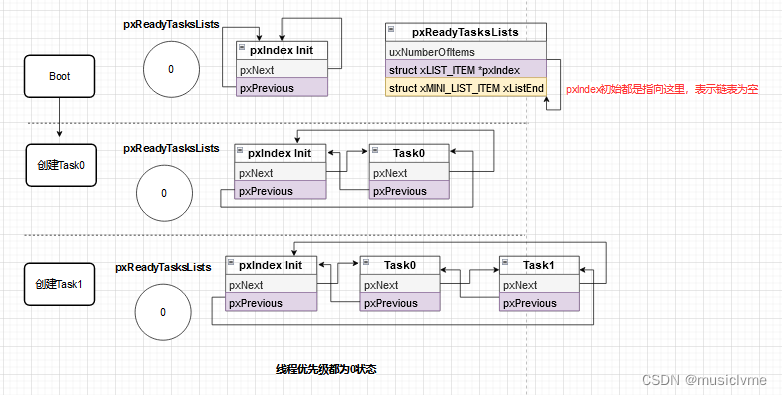
优先级相同的线程示例
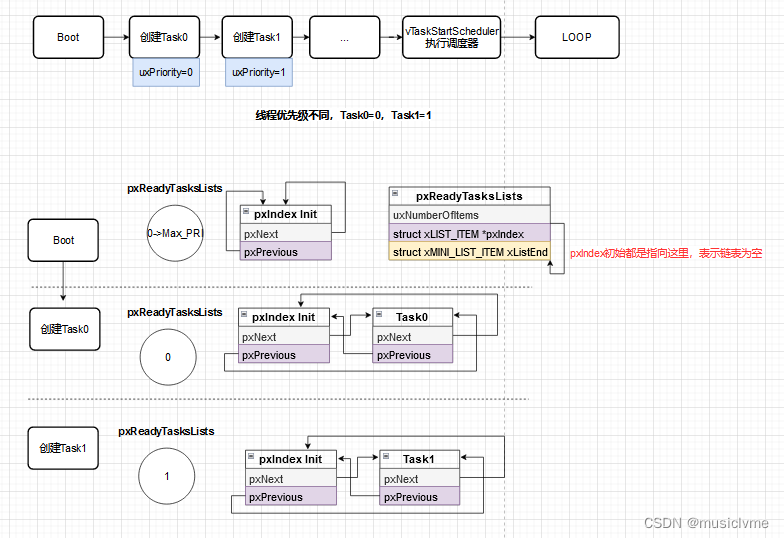
优先级不同的线程示例
- 基于优先级的主动线程调度流程
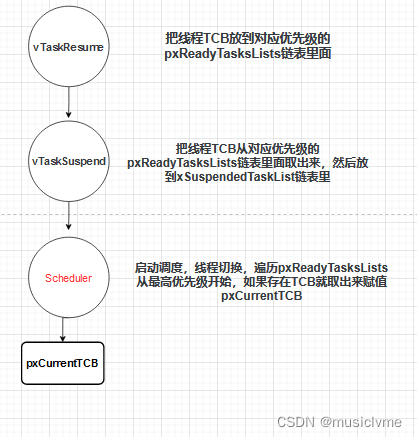
vTaskResume先把需要运行的线程放到pxReadyTasksLists链表中;
vTaskSuspend把当前运行的线程放到xSuspendedTaskList链表中;
Scheduler调度器基于优先级,遍历pxReadyTasksLists链表,取出最高优先级下的TCB赋值给pxCurrentTCB,然后执行上下文切换操作。















 2861
2861











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









