






Chapter 1 Environment
Ubuntu 14.10
Linux Kernel 3.9.4
Chapter 2 Source Code
mypcb.h
#define MAX_TASK_NUM 4
#define KERNEL_STACK_SIZE 1024*8
/* CPU-specific state of this task */
struct Thread {
unsigned long ip;
unsigned long sp;
};
typedef struct PCB{
int pid;
volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */
char stack[KERNEL_STACK_SIZE];
/* CPU-specific state of this task */
struct Thread thread;
unsigned long task_entry;
struct PCB *next;
}tPCB;
void my_schedule(void);mymain.c
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
tPCB task[MAX_TASK_NUM];
tPCB * my_current_task = NULL;
volatile int my_need_sched = 0;
void my_process(void);
void __init my_start_kernel(void)
{
int pid = 0;
int i;
/* Initialize process 0*/
task[pid].pid = pid;
task[pid].state = 0;/* -1 unrunnable, 0 runnable, >0 stopped */
task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process;
task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1];
task[pid].next = &task[pid];
/*fork more process */
for(i=1;i<MAX_TASK_NUM;i++)
{
memcpy(&task[i],&task[0],sizeof(tPCB));
task[i].pid = i;
task[i].state = -1;
task[i].thread.sp = (unsigned long)&task[i].stack[KERNEL_STACK_SIZE-1];
task[i].next = task[i-1].next;
task[i-1].next = &task[i];
}
/* start process 0 by task[0] */
pid = 0;
my_current_task = &task[pid];
asm volatile(
"movl %1,%%esp\n\t" /* set task[pid].thread.sp to esp */
"pushl %1\n\t" /* push ebp */
"pushl %0\n\t" /* push task[pid].thread.ip */
"ret\n\t" /* pop task[pid].thread.ip to eip */
"popl %%ebp\n\t"
:
: "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/
);
}
void my_process(void)
{
int i = 0;
while(1)
{
i++;
if(i%10000000 == 0)
{
printk(KERN_NOTICE "this is process %d -\n",my_current_task->pid);
if(my_need_sched == 1)
{
my_need_sched = 0;
my_schedule();
}
printk(KERN_NOTICE "this is process %d +\n",my_current_task->pid);
}
}
}myinterrupt.c
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
extern tPCB task[MAX_TASK_NUM];
extern tPCB * my_current_task;
extern volatile int my_need_sched;
volatile int time_count = 0;
/*
* Called by timer interrupt.
* it runs in the name of current running process,
* so it use kernel stack of current running process
*/
void my_timer_handler(void)
{
#if 1
if(time_count%1000 == 0 && my_need_sched != 1)
{
printk(KERN_NOTICE ">>>my_timer_handler here<<<\n");
my_need_sched = 1;
}
time_count ++ ;
#endif
return;
}
void my_schedule(void)
{
tPCB * next;
tPCB * prev;
if(my_current_task == NULL
|| my_current_task->next == NULL)
{
return;
}
printk(KERN_NOTICE ">>>my_schedule<<<\n");
/* schedule */
next = my_current_task->next;
prev = my_current_task;
if(next->state == 0)/* -1 unrunnable, 0 runnable, >0 stopped */
{
/* switch to next process */
asm volatile(
"pushl %%ebp\n\t" /* save ebp */
"movl %%esp,%0\n\t" /* save esp */
"movl %2,%%esp\n\t" /* restore esp */
"movl $1f,%1\n\t" /* save eip */
"pushl %3\n\t"
"ret\n\t" /* restore eip */
"1:\t" /* next process start here */
"popl %%ebp\n\t"
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
}
else
{
next->state = 0;
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
/* switch to new process */
asm volatile(
"pushl %%ebp\n\t" /* save ebp */
"movl %%esp,%0\n\t" /* save esp */
"movl %2,%%esp\n\t" /* restore esp */
"movl %2,%%ebp\n\t" /* restore ebp */
"movl $1f,%1\n\t" /* save eip */
"pushl %3\n\t"
"ret\n\t" /* restore eip */
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
return;
}Chapter 3 Debug
sudo apt-get install qemu # install QEMU
sudo ln -s /usr/bin/qemu-system-i386 /usr/bin/qemu
wget https://www.kernel.org/pub/linux/kernel/v3.x/linux-3.9.4.tar.xz
wget https://raw.github.com/mengning/mykernel/master/mykernel_for_linux3.9.4sc.patch
xz -d linux-3.9.4.tar.xz
tar -xvf linux-3.9.4.tar
cd linux-3.9.4
patch -p1 < ../mykernel_for_linux3.9.4sc.patch
make allnoconfig
make
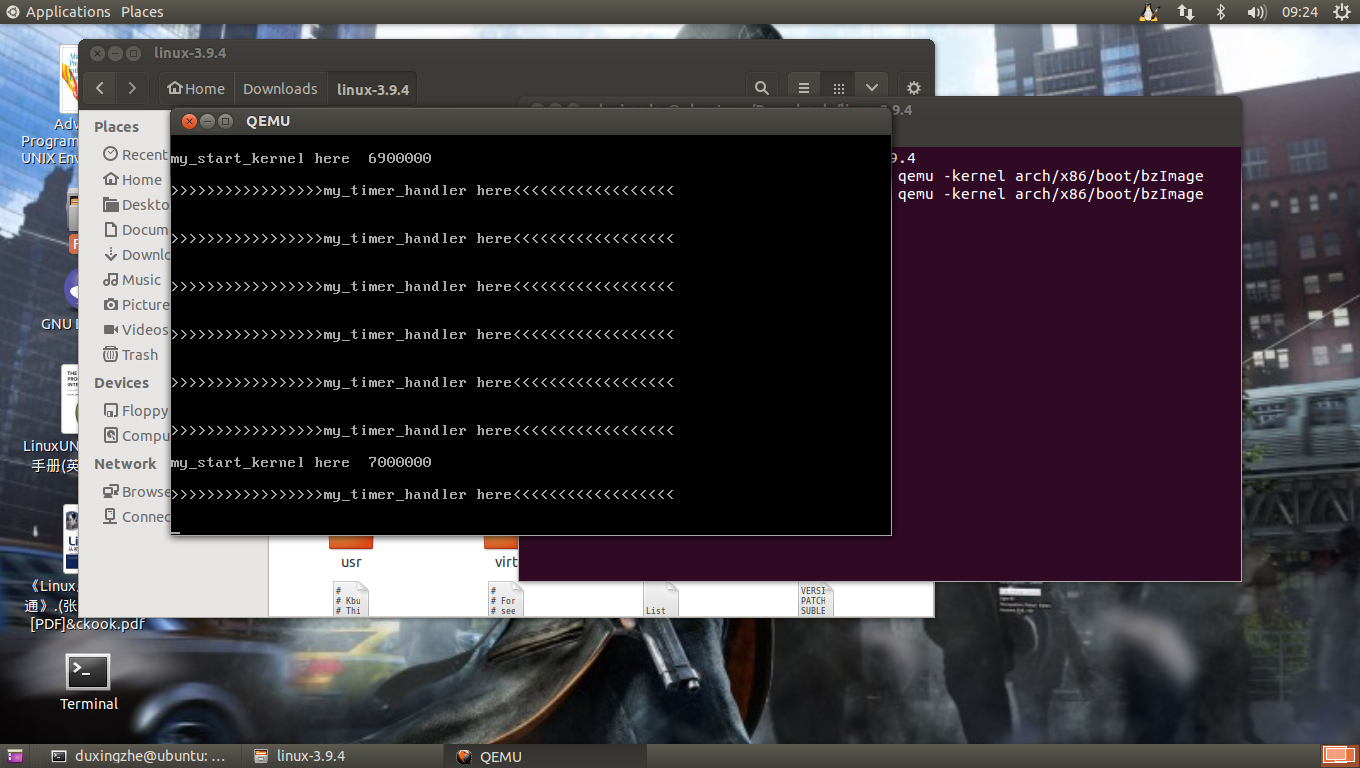
qemu -kernel arch/x86/boot/bzImage
Chapter 4 Analysis
At header file mypcb.h, we defined a struct Thread to store the state of process in CPU, which defined a stack. This is significant. We represent the process as Thread. However the macro variable MAX_TASK_NUM shows that we defined four processes.
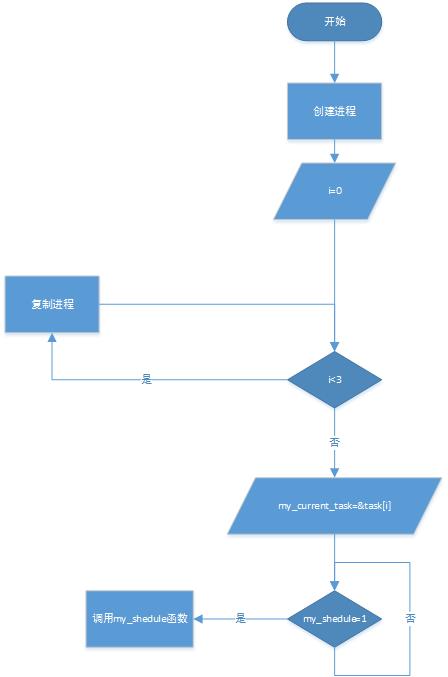
Next, we analysis the file mymain.c
First, the program set four processes which is named A, B, C, D respectively. The we set the information of pid, state, task_entry, thread.ip, thread.sp. According to the comment, the variable state shows the state of the process. And then we link the process data structure by link table.
Show as follows:

Then, the for statement is create the three other process quickly.
my_current_task record the process which running, and exchange the value of pi and sp of task[pid];
But the question is: How to exchange?
That is the my_process function. The variable i is a counter. When i satisfy the if statement, the information will be outputed. Put another words, we should decide if my_need_sched is equal with 1. Then return to change the value of my_current_task.
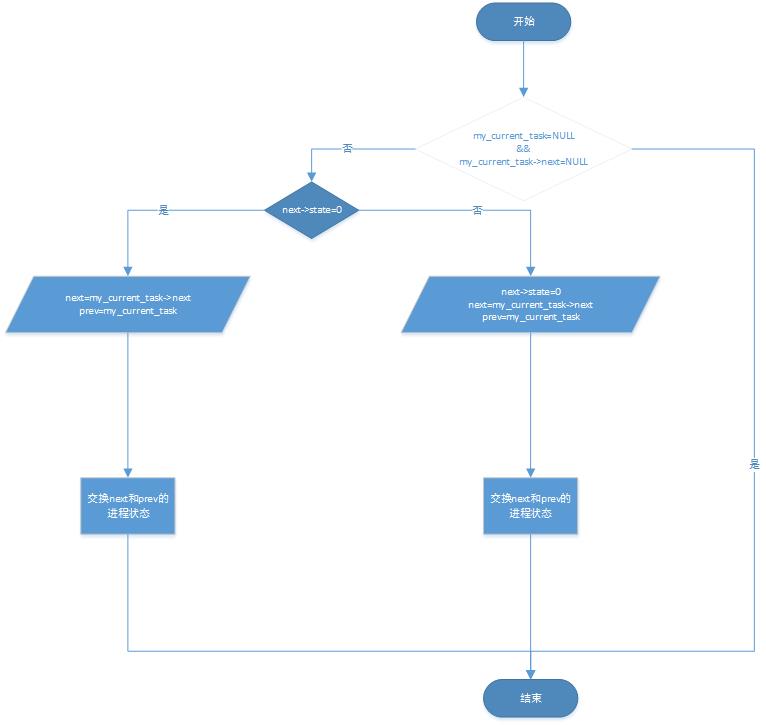
Then we will analysize the my_shedule function.
First we define two pointer *next, *prev to point out the process. To avoid error, we should set an if statement to ensure that my_current_task is pointing a process indeed and it didn't point to the end of the link table. It will be error if it is a NULL pointer and there is no element at backward.
Next, we execute the AT&T code. If the process is runing(state=0), exchange the situation of these two process. If the process is not running, we will set state as 0 and the exchange.
At current situation, we can't execute my_task_handler. As far as I am concerned, this is the function of timer which is the function that how long the CPU make an interrupt to the process. If we add a statement #define 1 and add the call statement, we may have the function of interrupt int CPU.
Process Diagram:
my_main.c
my_interrupt.c
Appendix
Luxuan + Writen by the author, Please let me know if you want to take it as a reference + Linux Kernel Analyzation a course of MOOC website:http://mooc.study.163.com/course/USTC-1000029000















 154
154

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









