







 本文探讨了四连杆运动仿真的核心问题——如何确定两个圆的正确交点。通过分析向量BD与BC的叉乘结果的正负号,可以判断并选取合适的交点,在仿真过程中保持一致性。
本文探讨了四连杆运动仿真的核心问题——如何确定两个圆的正确交点。通过分析向量BD与BC的叉乘结果的正负号,可以判断并选取合适的交点,在仿真过程中保持一致性。
四连杆运动仿真的关键是求两个圆的交点,
两个圆有两个交点,哪个才是俺们想要的呢?
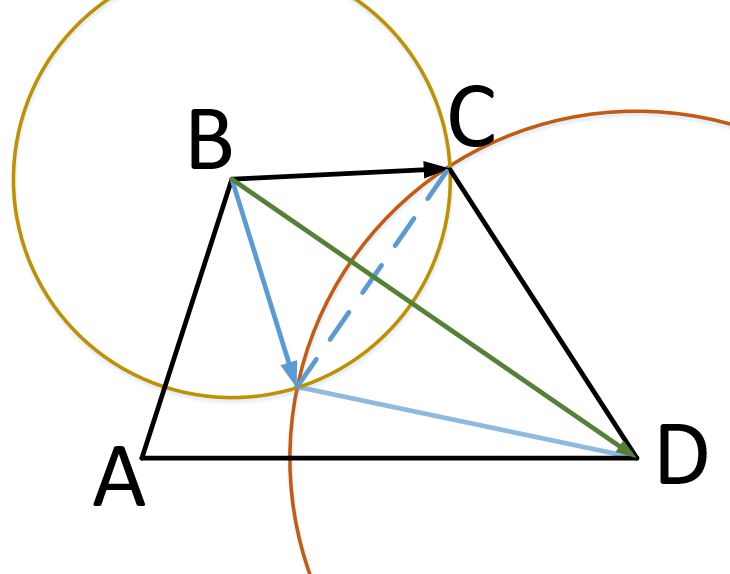
简单的说,向量BD叉乘BC,会出现正负号,一次仿真中要不取全正值,要不全取负值
/* 求两个圆的交点
* 0 : error
* 1 : one point
* 2 : two points
* 3 : the same circle
*/
template<typename _EvalType_=Number>
inline int circle_circle_intersection(
_EvalType_ x0,_EvalType_ y0,_EvalType_ r0,
_EvalType_ x1,_EvalType_ y1,_EvalType_ r1,
_EvalType_ *xi,_EvalType_ *yi,
_EvalType_ *xi_prime,_EvalType_ *yi_prime) {
/*http://paulbourke.net/geometry/circlesphere/*/
/* dx and dy are the vertical and horizontal distances between
* the circle centers.
*/
auto dx=x1-x0;
auto dy=y1-y0;
/* Determine the straight-line distance between the centers. */
//d = sqrt((dy*dy) + (dx*dx));
auto d=std::hypot(dx,dy); // Suggested by Kei 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 718
718

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









