






目 录
第1章 绪论 1
1.1 研究背景和意义 1
1.2 无盖铝型材式AGV的基本结构和特点 1
1.2.1 无盖铝型材式AGV的基本结构 2
1.2.2 无盖铝型材式AGV的特点 3
1.3国内外发展现状 3
1.3.1国外发展现状 3
1.3.2 国内发展现状 4
第2章 总体方案设计 6
2.1 移载方式 6
2.1.1 移载方式分类 6
2.1.2 移载方式选定 7
2.2 导引方式 7
2.2.1 导引方式分类 7
2.2.2 导引方式选定 9
2.3 传动轮系 10
2.3.1 传动轮系分类 10
2.3.2 传动轮系选定 11
2.4 转向方式 12
2.4.1 转向方式分类 12
2.4.2 转向方式选定 12
2.5 总体方案的选定 13
第3章 机械及硬件结构设计 14
3.1 潜伏式自动导引车的设计概述 14
3.2 驱动机构的设计 14
3.2.1 驱动单元参数计算 15
3.2.2 驱动电机选型 18
3.3 升降牵引机构的设计 19
3.3.1升降销的设计 19
3.3.2 升降机构原理 20
3.3.2 升降装置有限元分析 21
3.4 车体框架的设计 24
3.4.1 无盖铝型材式AGV小车的车体尺寸的设计 24
3.4.2 主框架的设计 25
3.4.3 副框架的设计 27
3.4.4 车体框架的焊接工艺 28
3.5小车底盘的有限元分析 29
3.6 整体三维建模 31
第4章 小车控制系统分析与设计 33
4.1 小车控制方案简述 33
4.2 无盖铝型材式AGV小车运动分析 34
4.3 无盖铝型材式AGV小车传感器方案 36
4.3.1磁导航传感器 36
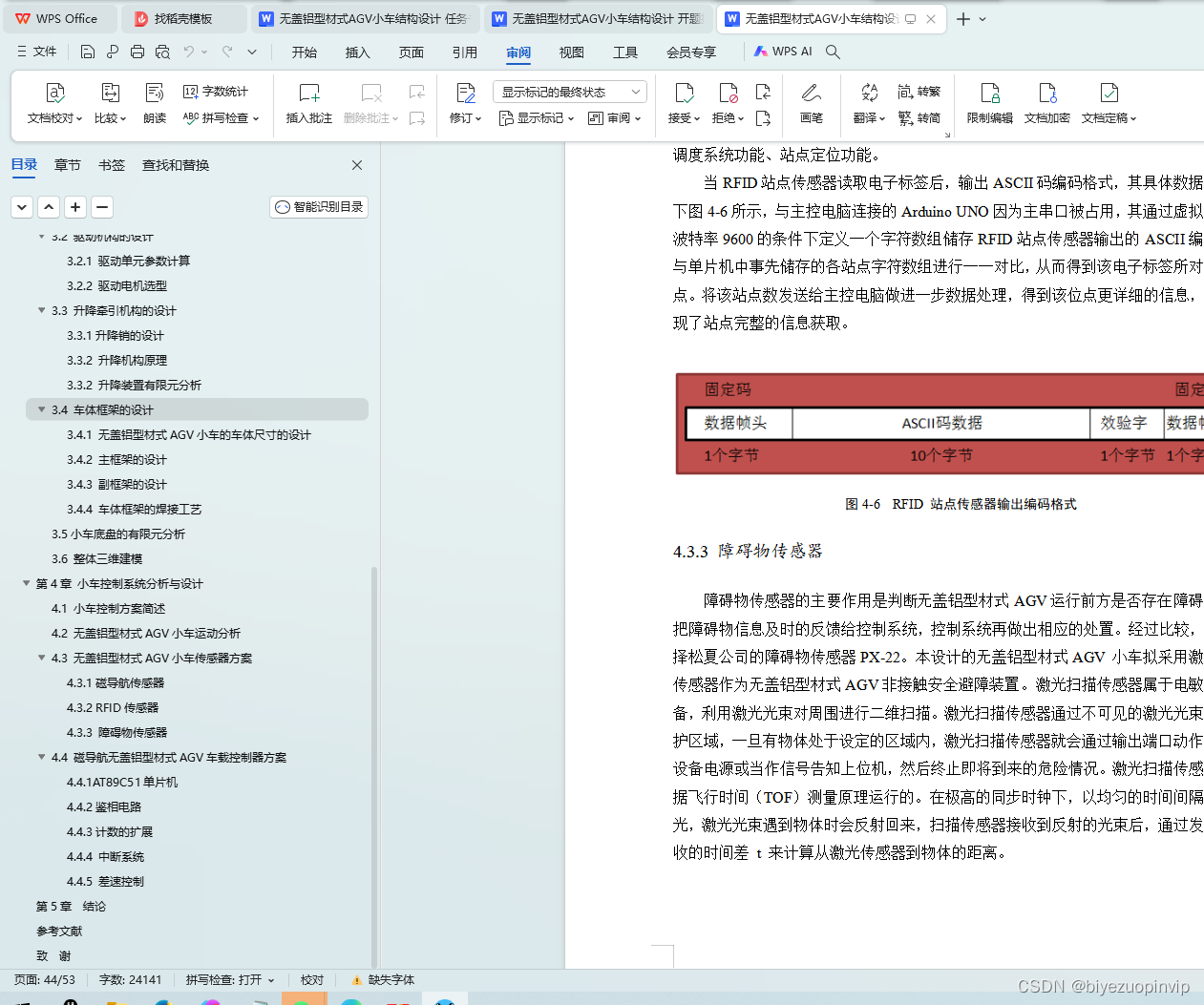
4.3.2 RFID传感器 39
4.3.3 障碍物传感器 40
4.4 磁导航无盖铝型材式AGV车载控制器方案 41
4.4.1AT89C51单片机 41
4.4.2鉴相电路 42
4.4.3计数的扩展 43
4.4.4 中断系统 44
4.4.5 差速控制 45
第5章 结论 47
参考文献 48
致 谢 49
两轮电子差速在 无盖铝型材式AGV 上已经广泛使用,其一般工作过程可以描述为:无盖铝型材式AGV控制器接受导航传感器的路径信息,判断 无盖铝型材式AGV 当前位置是否与路径相符,如果与当前位置相符,则继续按当前速度前行;反之,则利用 PID 算法对两轮的转速进行调节,并将每个驱动轮的转速信号传递给相应的电机驱动器,由电机驱动器驱动主动轮电机,实现两电机的转速差控制,从而保证 无盖铝型材式AGV 能够沿着导航路径平稳行驶。电子差速可以不受机械结构的束缚,传动链较短,减小了系统发生故障的概率。同时,减小了传动系统所占的空间,无盖铝型材式AGV内部结构布置更加灵活,有利于零部件的模块化设计和生产,提高了产品的互换性及智能化程度。
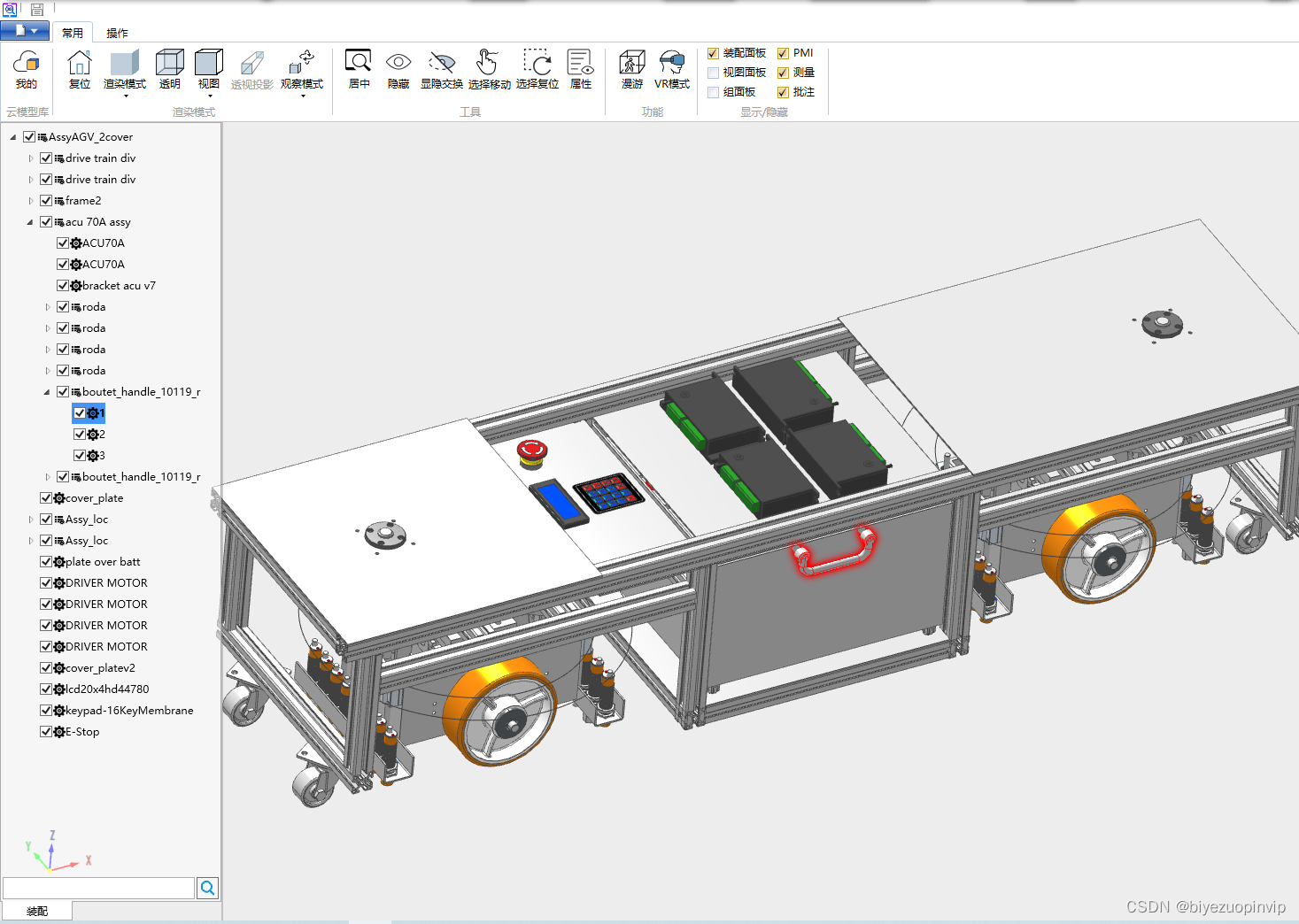
2.5 总体方案的选定
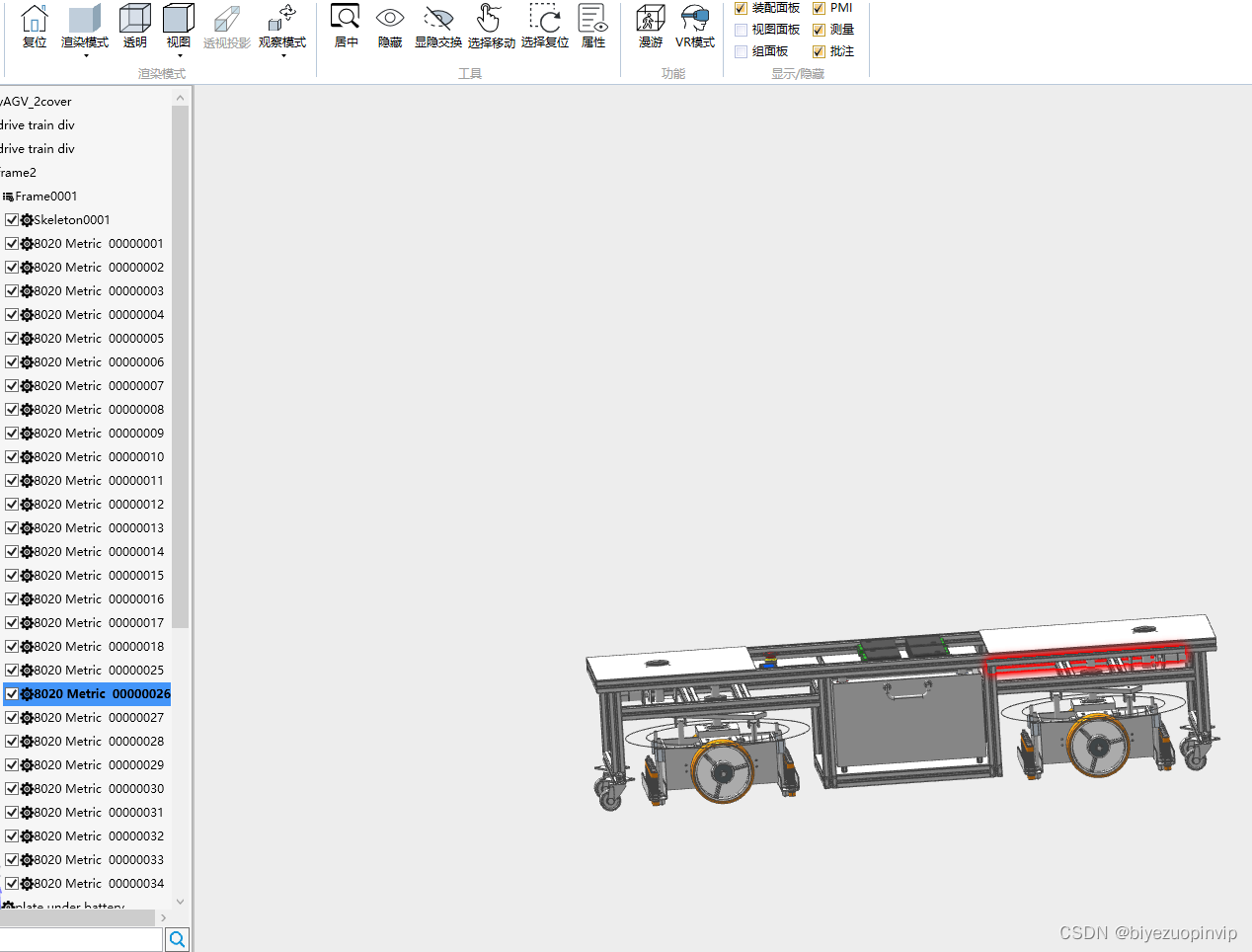
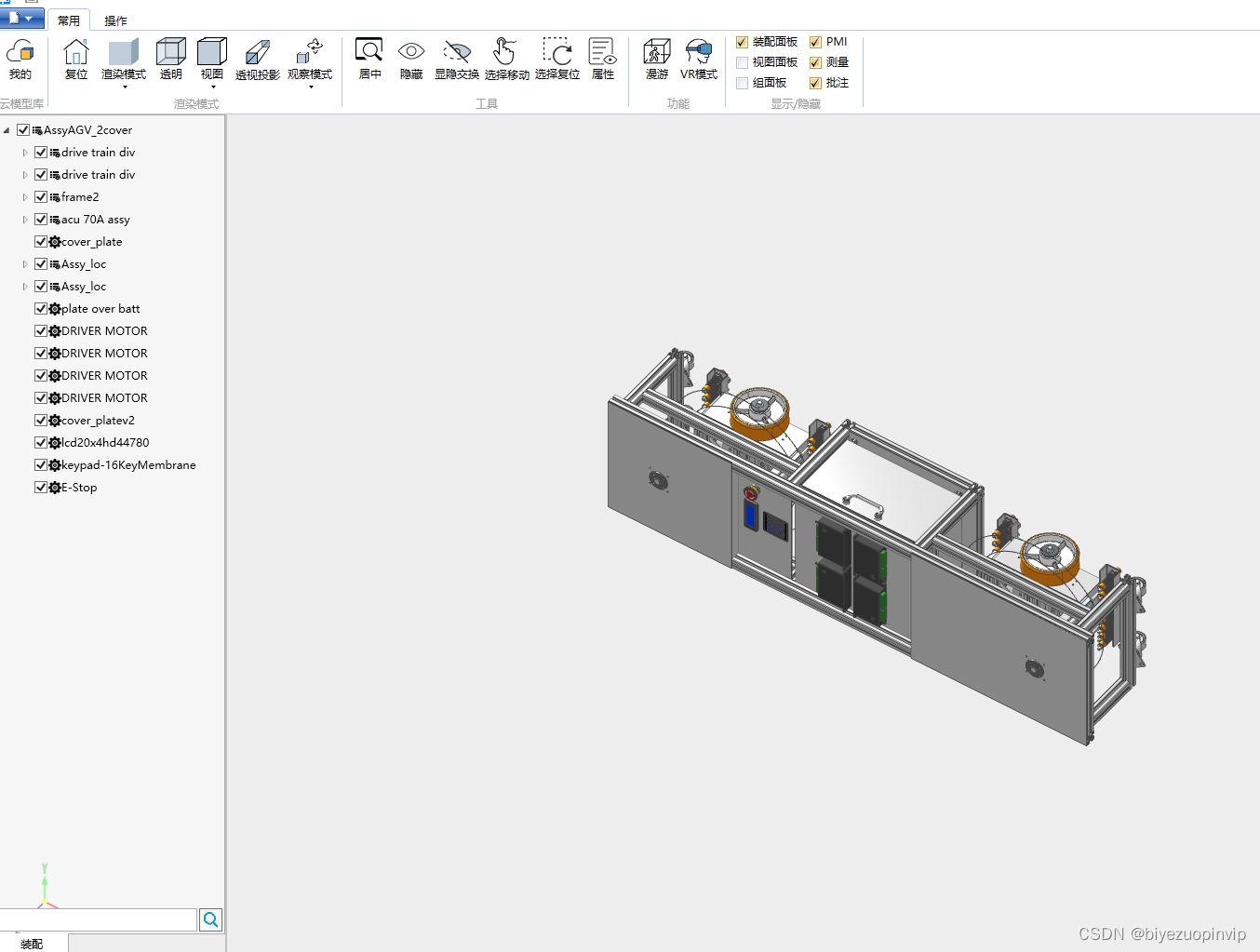
根据以上的移载、导引、传动和转向的选定,本次设计设计一辆潜伏式磁导引小车无盖铝型材式AGV,能够依照地面上已设定好的轨迹路线进行行驶,正常满足在生产车间的搬运货物。
其参数设定如下:
自重拟定:150kg
运载能力:800kg
最大牵引速度:45m/min
导引介质:磁带N级
驱动方式:两轮差速
轮系布局:六轮结构

















 846
846

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









