






 本文详细介绍了点胶机系统软件源码,涉及Halcon视觉定位的原理和在点胶路径、运动控制中的应用,以及六轴运控技术如何提升灵活性。链接:http://imgcs.cn/lanzoun/689891213059.html
本文详细介绍了点胶机系统软件源码,涉及Halcon视觉定位的原理和在点胶路径、运动控制中的应用,以及六轴运控技术如何提升灵活性。链接:http://imgcs.cn/lanzoun/689891213059.html
点胶机系统软件源码 Halcon视觉定位加六轴运控 设备机台运行量产
需自行安装搭建。
halcon19

点胶机系统软件源码是一种用于控制点胶机操作的软件代码,它结合了Halcon视觉定位和六轴运控技术,使设备能够进行精准的点胶操作并实现高效的量产。本文将围绕这一主题展开,从软件源码的结构与功能、Halcon视觉定位的原理与应用、六轴运控技术的原理与优势等方面进行详细的分析与阐述。
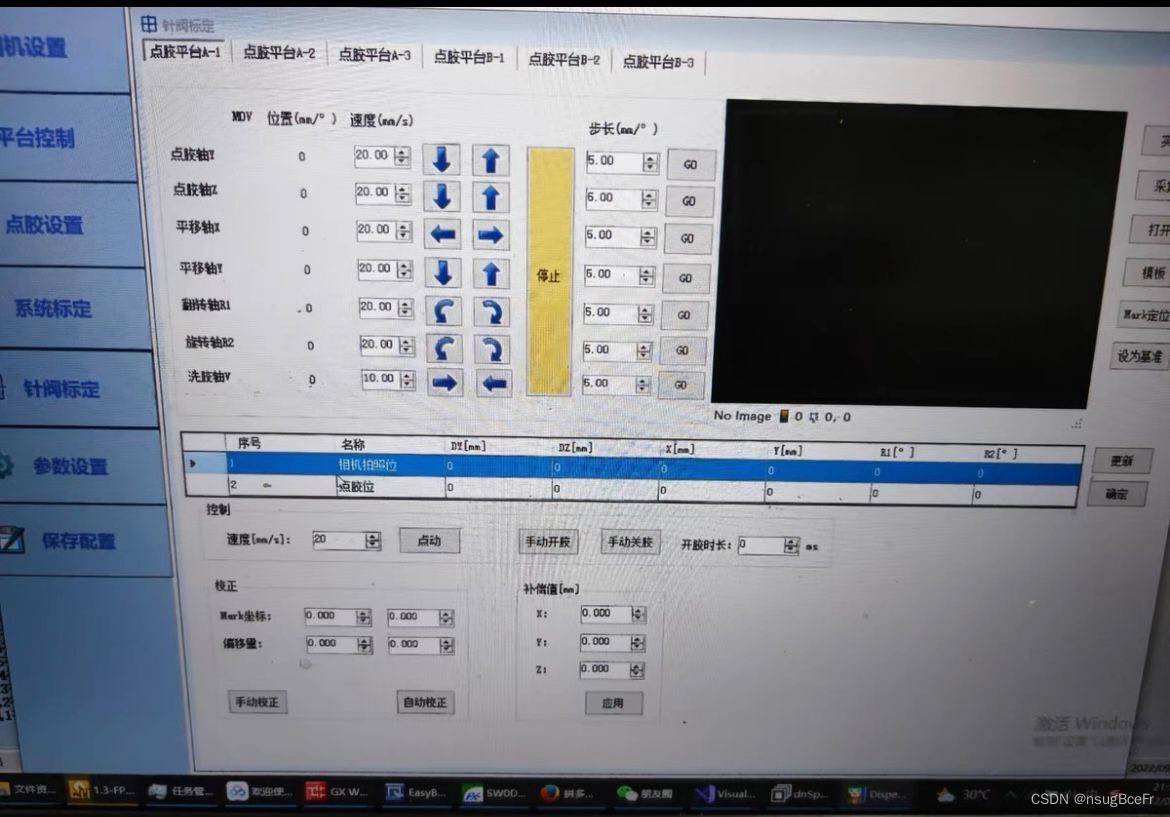
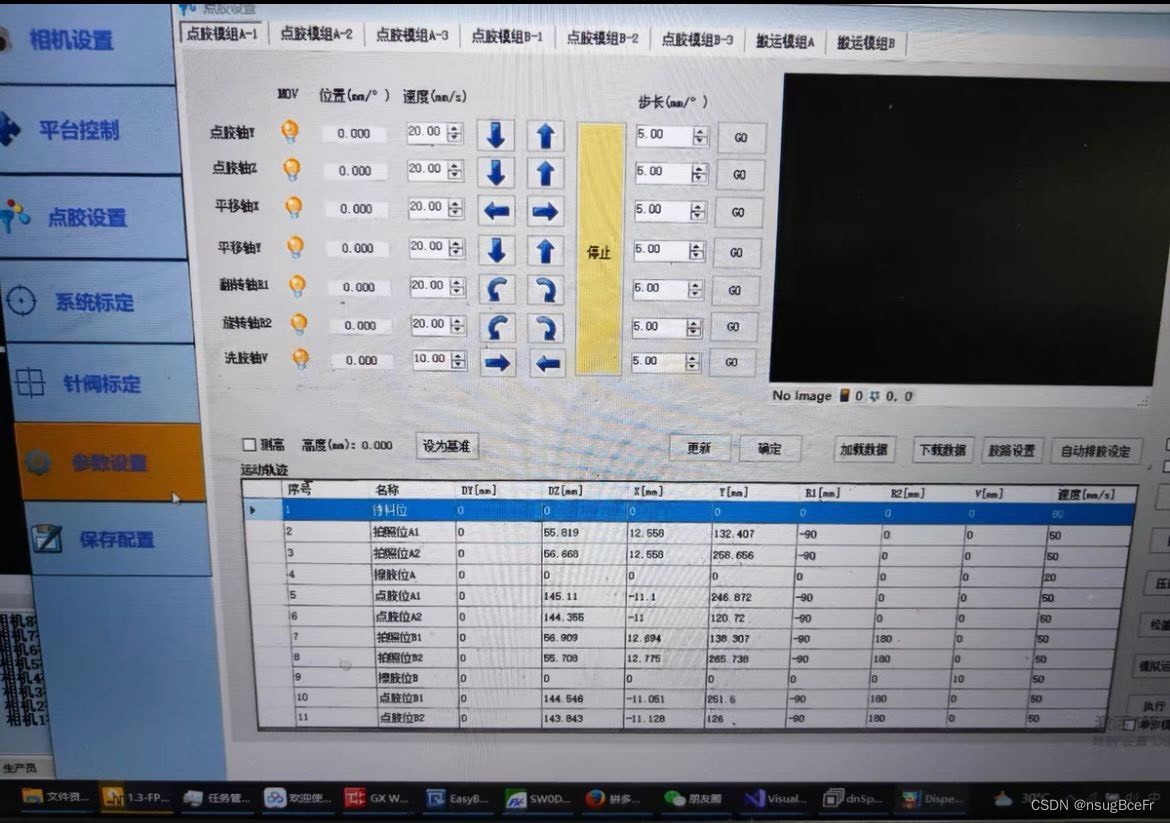
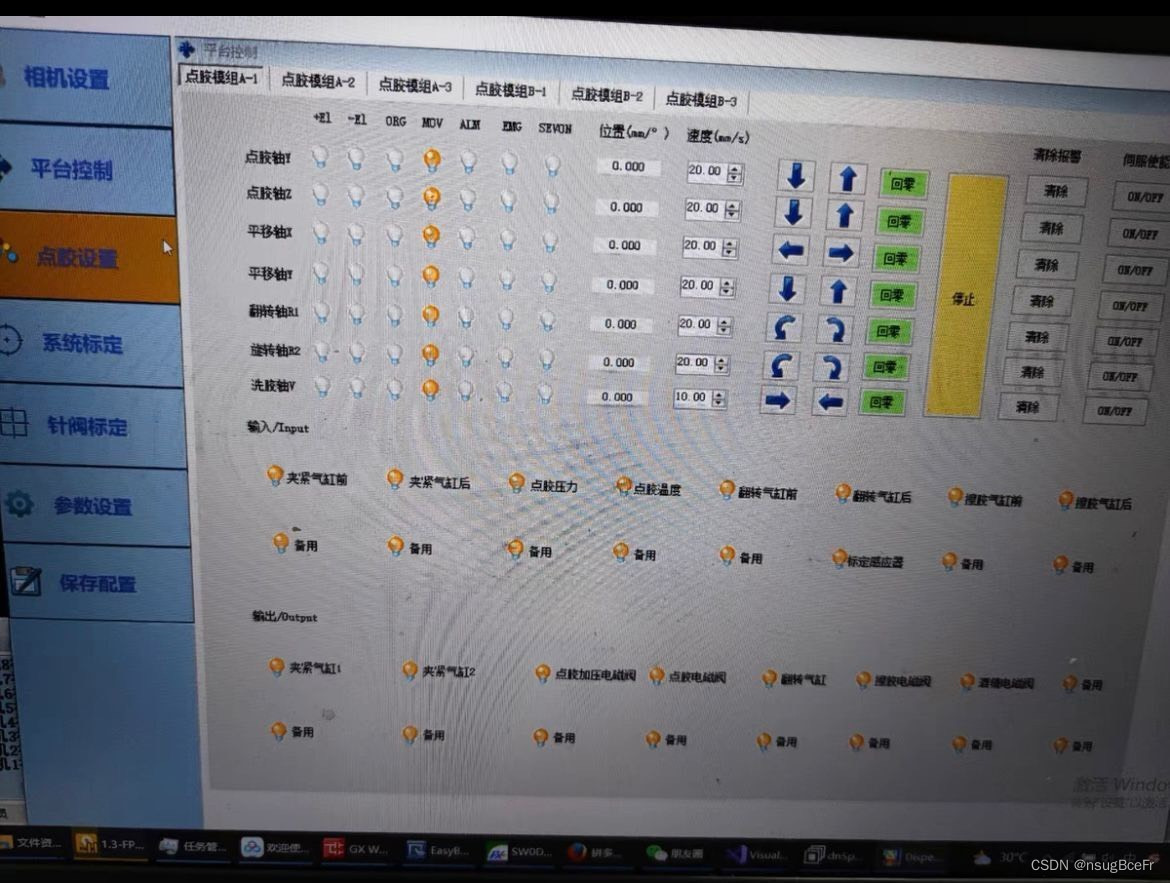
首先,点胶机系统软件源码的结构与功能是实现点胶机自动操作的关键。该软件源码由多个模块组成,包括点胶路径生成模块、运动控制模块、视觉定位模块等。其中,点胶路径生成模块负责根据设定的点胶轨迹生成合适的点胶路径,确保点胶操作的准确性和稳定性。运动控制模块则负责控制六轴机械臂的运动,将其精准地移动到指定的点胶位置。而视觉定位模块则利用Halcon视觉系统,对工件进行图像处理和分析,实现对点胶位置的准确定位。
其次,Halcon视觉定位技术在点胶机系统软件中的应用是提高点胶操作精度的关键因素。Halcon是一种强大的视觉处理软件,具有图像处理、特征提取和定位等功能。在点胶机系统中,Halcon视觉定位技术可以通过对被加工工件的图像进行处理和分析,提取出关键特征并准确定位要点胶的位置。与传统的手动定位相比,Halcon视觉定位技术极大地提高了定位的准确性和稳定性,从而提高了点胶操作的精度和效率。
最后,六轴运控技术在点胶机系统软件中的应用是实现灵活运动控制的关键。六轴机械臂具有良好的自由度和灵活性,并可以在三维空间内进行精准的运动控制。在点胶机系统中,六轴运控技术可以将机械臂根据点胶路径生成模块生成的点胶路径,精确地移动到指定的点胶位置,并控制点胶阀进行胶水的喷涂。相比传统的固定式点胶机,六轴机械臂具有更高的灵活性和自由度,能够适应不同形状和尺寸的工件进行点胶操作,提高了点胶操作的适用性和效率。
综上所述,点胶机系统软件源码结合了Halcon视觉定位和六轴运控技术,实现了点胶操作的精准与高效。通过对软件源码的结构与功能、Halcon视觉定位技术的原理与应用、六轴运控技术的优势与应用等方面的详细分析与阐述,我们对于点胶机系统软件的实现原理和应用特点有了更深入的了解。这将为点胶机系统的开发与应用提供有力的技术支持,实现更高质量和效率的点胶操作。
相关代码,程序地址:http://imgcs.cn/lanzoun/689891213059.html


















 606
606

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









