Camera Calibration
OpenCV提供具体的标定策略和说明文档,可以直接使用,说明文档的位置"D:\opencv\sources\doc\tutorials\calib3d\camera_calibration";
例程的位置“D:\opencv\sources\samples\cpp\camera_calibration.cpp”
如何使用例程呢?首先修改配置文档xml
<? xml version = "1.0" ?> < opencv_storage > < Settings > < BoardSize_Width > 7 </ BoardSize_Width > < BoardSize_Height > 7 </ BoardSize_Height > < Square_Size > 50 </ Square_Size > < Calibrate_Pattern > "CHESSBOARD" </ Calibrate_Pattern > <!-- The input to use for calibration. 所采集的标定图像存储的路径及名称xml档 To use an input camera -> give the ID of the camera, like "1" To use an input video -> give the path of the input video, like "/tmp/x.avi" To use an image list -> give the path to the XML or YAML file containing the list of the images, like "/tmp/circles_list.xml" --> < Input > "./vtDirTest.xml" </ Input > < Input_FlipAroundHorizontalAxis > 0 </ Input_FlipAroundHorizontalAxis > < Input_Delay > 100 </ Input_Delay > < Calibrate_NrOfFrameToUse > 25 </ Calibrate_NrOfFrameToUse > <!-- Consider only fy as a free parameter, the ratio fx/fy stays the same as in the input cameraMatrix. Use or not setting. 0 - False Non-Zero - True--> < Calibrate_FixAspectRatio > 1 </ Calibrate_FixAspectRatio > < Calibrate_AssumeZeroTangentialDistortion > 1 </ Calibrate_AssumeZeroTangentialDistortion > < Calibrate_FixPrincipalPointAtTheCenter > 1 </ Calibrate_FixPrincipalPointAtTheCenter > < Write_outputFileName > "out_camera_vt.xml" </ Write_outputFileName > < Write_DetectedFeaturePoints > 1 </ Write_DetectedFeaturePoints > < Write_extrinsicParameters > 1 </ Write_extrinsicParameters > < Show_UndistortedImage > 1 </ Show_UndistortedImage > </ Settings > </ opencv_storage >
大概修改上述标注的几个位置,然后运行camera_calibration.cpp即可;
工程下载地址
参考【1】 【2】
因为据说使用Matlab的工具箱进行标定会比较准确,所以计划对比测试两种标定方式;
参考【3】 【4】
首先下载toolbox_calib.zip ,在【3】中有下载链接;解压之后放在工作目录下,同时跟随【4】进行标定,叙述很详尽;
但因为内容较多,现简略叙述:
2.1 启动标定工具箱
运行calib.m,选择图像载入模式
当图像量大且多时需要使用第二种方式;此处选择标准模式为例:
2.2 载入图像
进入图像所在目录,然后点击Image names按钮
首先输入标定图像序列的名称前缀(不包含数字序号)如上方式,然后选择格式;ok;
2.3 提取角点
点击Extract grid corners按钮,在命令窗口如下述
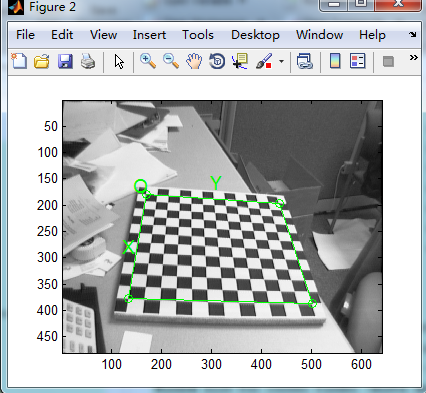
直接回车,将选择默认模式;窗口的大小为11×11,然后在对每一幅测试图档进行手动设置最外围的四个角点
按逆时针顺序进行选择
此时需要设定每个小方格在现实世界中的宽高,以便随后角点的自动选择;
此处设定为30mm×30mm;只需第一次设定;
然后每一幅图像都需要设置外围的四个角点,这样会不会手酸???
若已经做过一次,可点击load选项,会自动载入Calib_Results.mat中的角点信息;
2.4 标定
在所有的图档都已经角点提取完毕之后,点击Calibration进行标定;
说明
A. 通过Recomp. corners按钮提高标定精确度;
B. Analyse error展示角点误差分布,用鼠标左键点击后,在命令窗口可直接显示该点信息;
C.Add/Suppress images 去除不需要的图档;
D. Show Extrinsic模拟每幅图像采集时的相对相机的位置角度;
其他的慢慢探索,文档【3】【4】相当详细;
为便于后续查找,也上传一份toobox及图档;下载地址
【5】 方法 一
【6】 方法二

































 815
815

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









