






 本文介绍了一种融合改进蚁群算法和动态窗口算法的路径规划策略,用于静态和动态环境。实验结果显示,这种方法在寻找最优路径和实时避障方面表现出色,优于传统算法。
本文介绍了一种融合改进蚁群算法和动态窗口算法的路径规划策略,用于静态和动态环境。实验结果显示,这种方法在寻找最优路径和实时避障方面表现出色,优于传统算法。
改进蚁群算法+动态窗口算法全局结合局部路径规划仿真
静态路径规划算法 采用改进蚁群算法,有单独对比代码
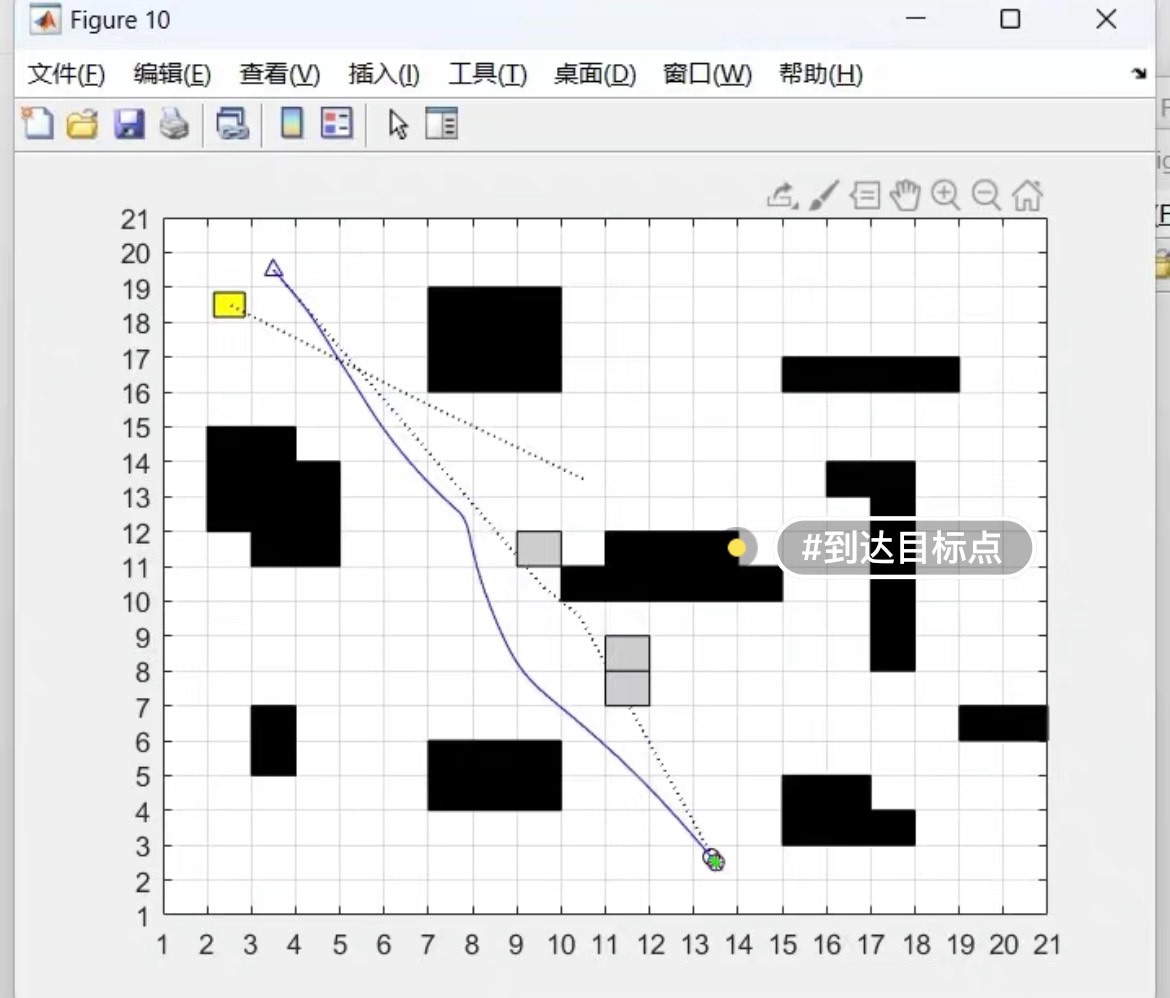
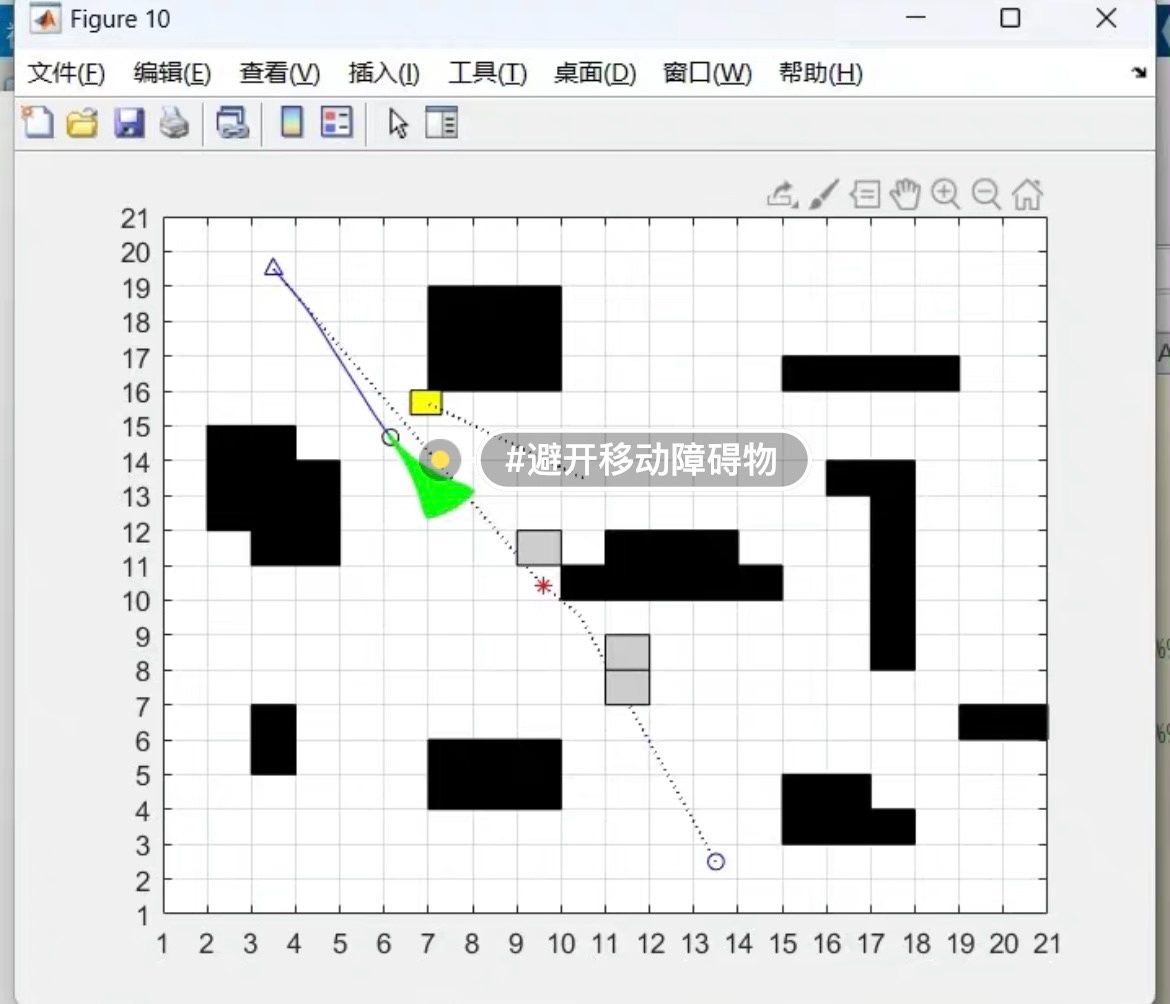
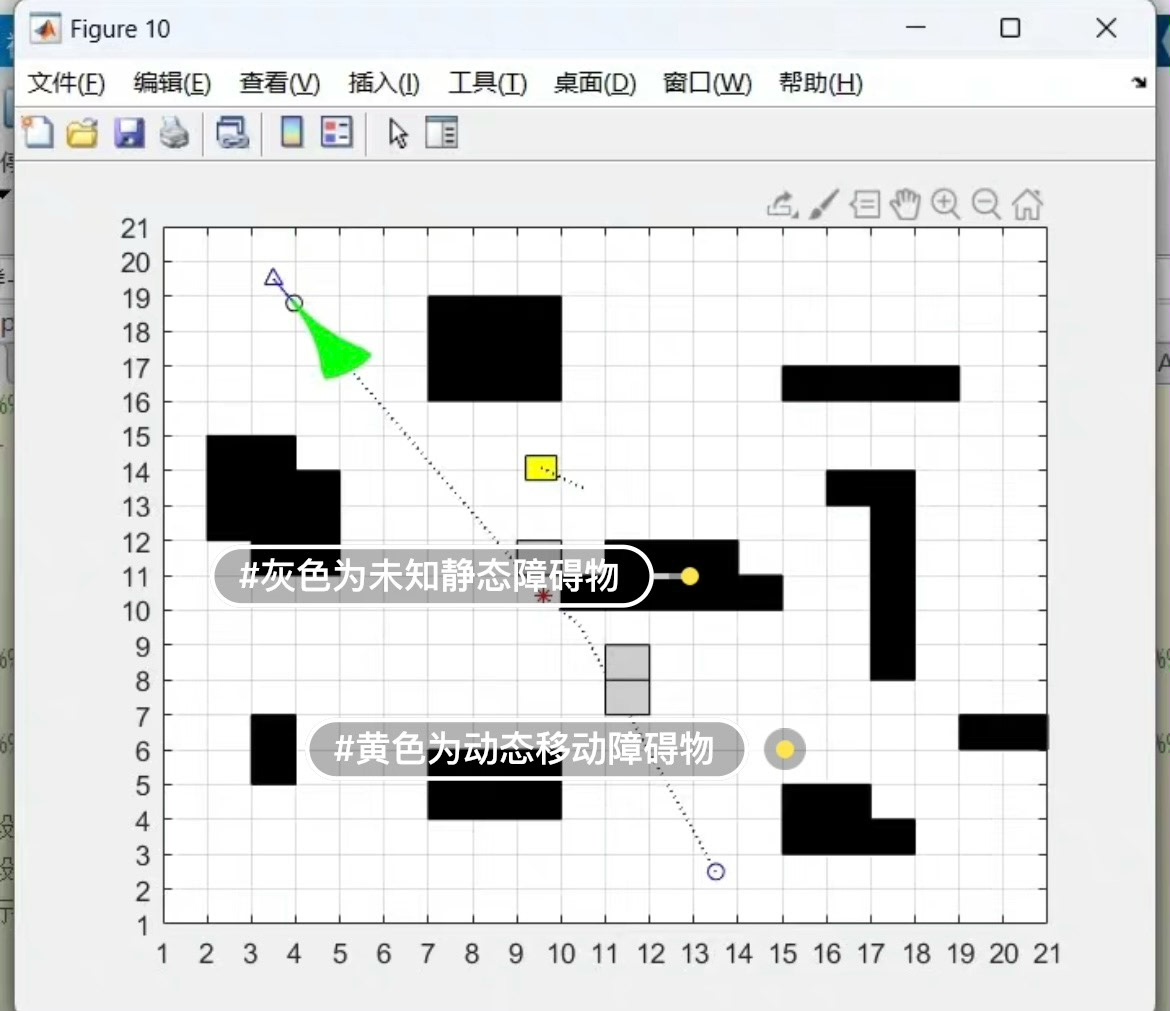
动态实时规划 采用动态窗口算法避开未知障碍物
可自行设置地图 未知静态障碍物 移动障碍物
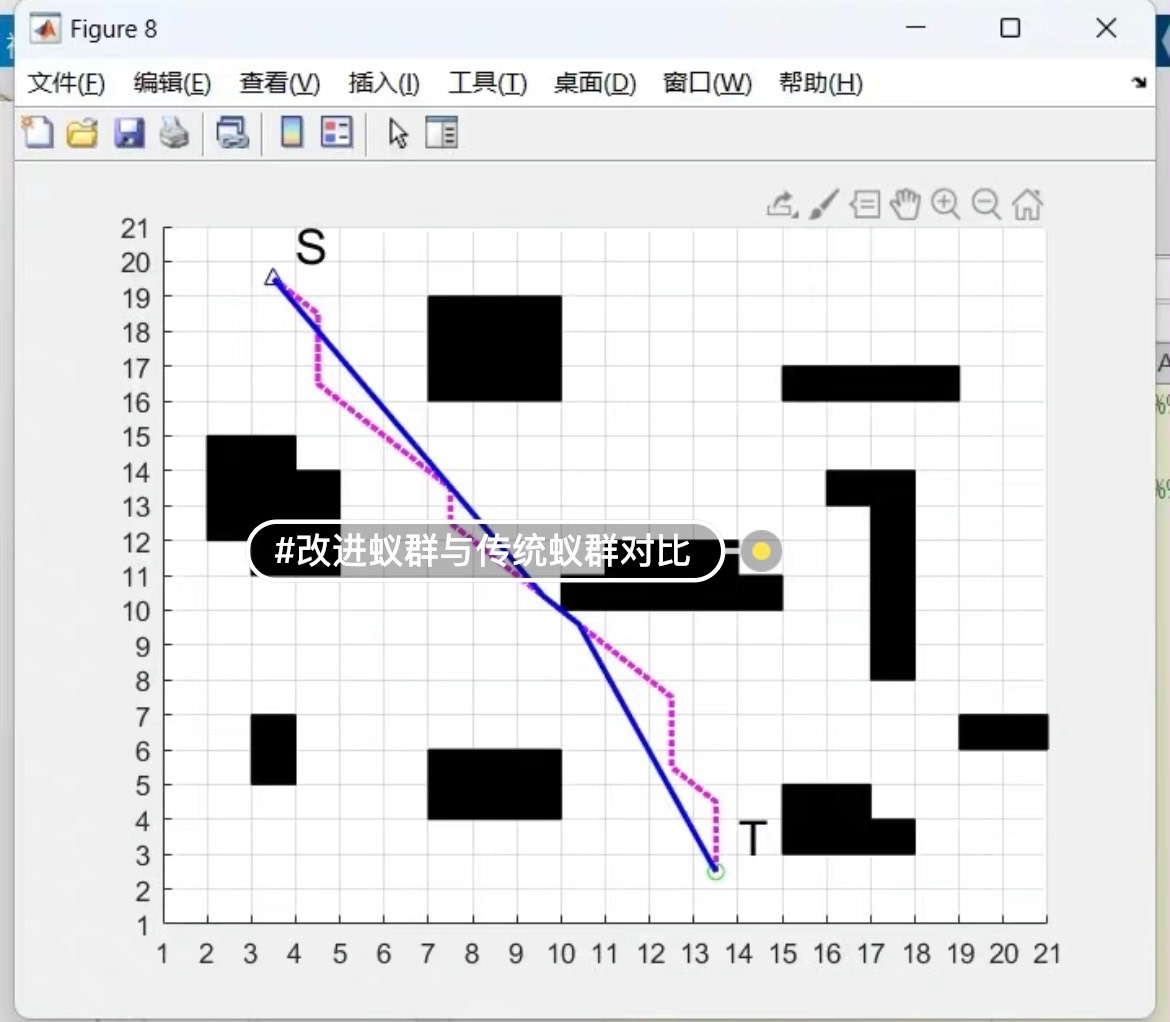
**附带单独改进蚁群全局对比代码,和单独动态窗口算法 作多项对比实验使用
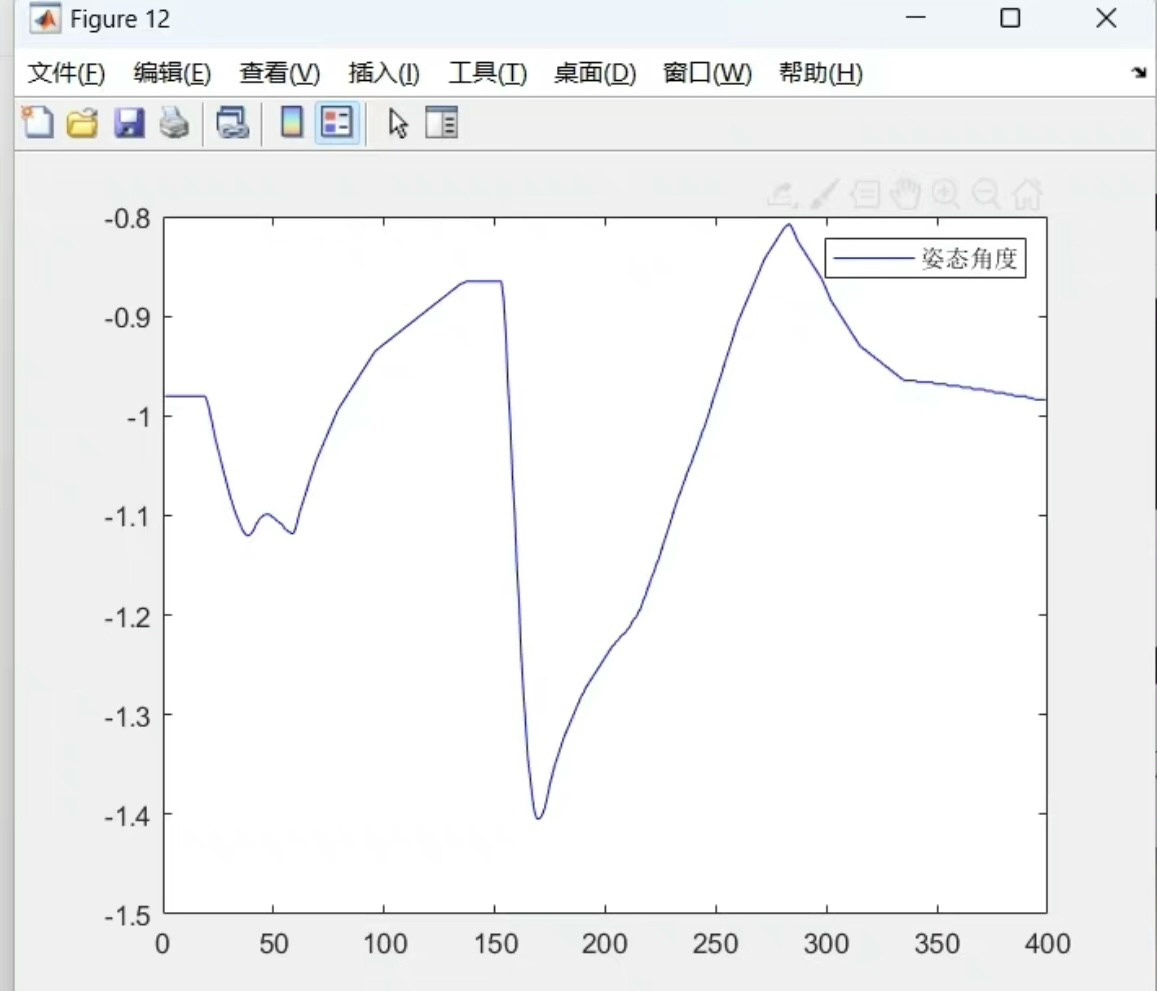
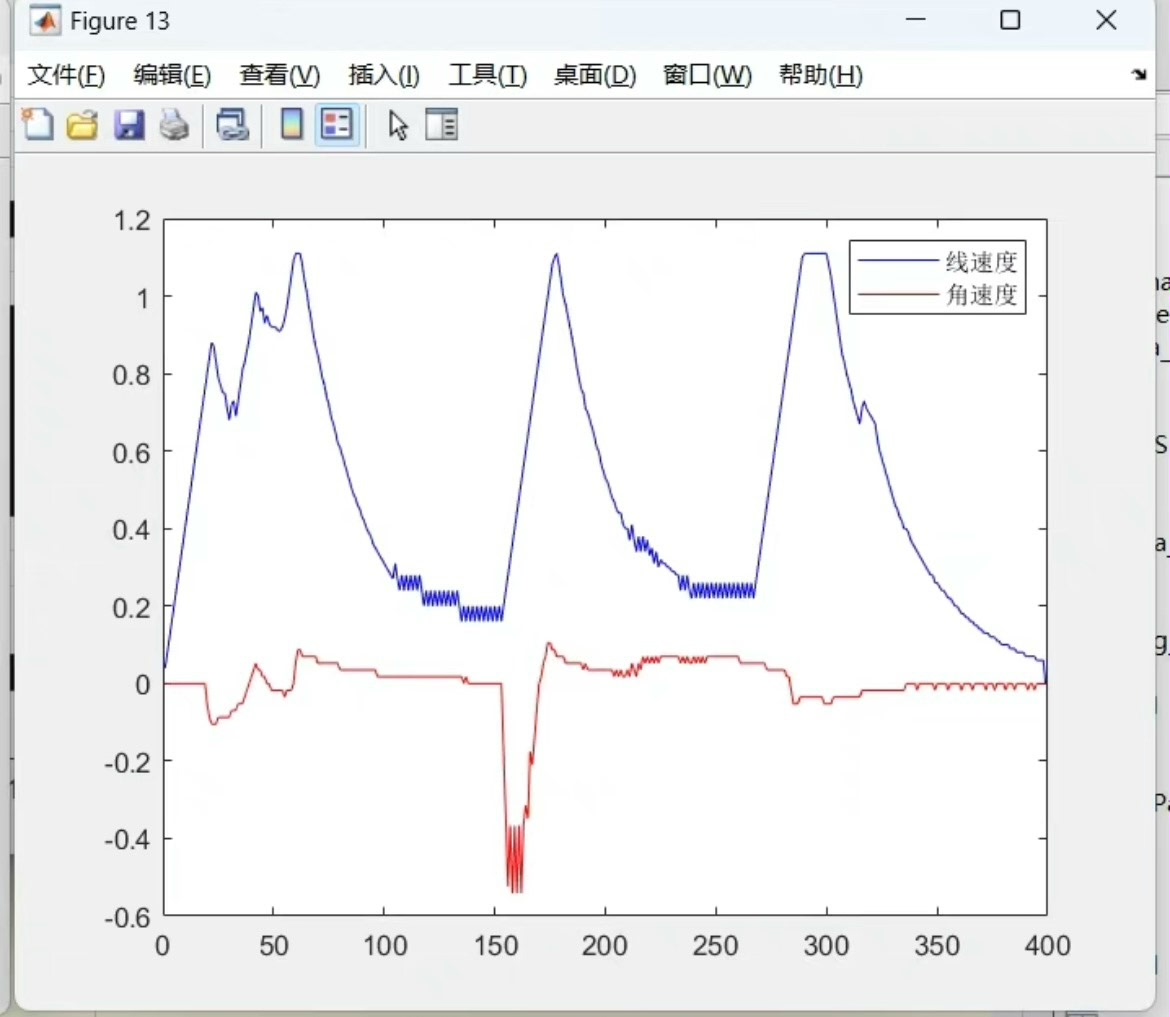
运行结果如下
预先声明:该程序为版权所述,仅供学习参考使用。
ID:44124717546605705
保利龙小叮当

改进蚁群算法+动态窗口算法全局结合局部路径规划仿真
摘要:本文介绍了一种结合改进蚁群算法和动态窗口算法的路径规划方法,用于解决静态和动态环境下的路径规划问题。改进蚁群算法用于静态路径规划,能够找到最优路径;动态窗口算法用于实时规划,在遇到未知障碍物时能够及时调整路径。通过多项对比实验,证明了该方法的有效性和性能优势。
-
引言
路径规划是机器人导航和人工智能领域中的重要问题。传统的路径规划算法往往只能适应静态环境,对于动态环境下的路径规划问题效果有限。本文提出了一种结合改进蚁群算法和动态窗口算法的路径规划方法,能够适应静态和动态环境,提高路径规划的效果和性能。 -
相关工作
2.1 改进蚁群算法
改进蚁群算法是一种基于模拟蚂蚁觅食行为的启发式优化算法。相较于传统蚁群算法,改进蚁群算法能够更好地处理路径规划问题,并找到最优路径。通过引入启发式信息和局部搜索机制,改进蚁群算法能够在较短时间内找到较好的路径。
2.2 动态窗口算法
动态窗口算法是一种实时路径规划算法,能够在运动中适应未知障碍物的出现。算法通过动态调整窗口大小,保证机器人能够及时避开障碍物。动态窗口算法具有高效性和实时性,适用于动态环境下的路径规划问题。
- 方法介绍
3.1 静态路径规划算法
静态路径规划算法采用改进蚁群算法,具体步骤如下:
- 初始化蚂蚁的位置和路径。
- 计算蚂蚁的可行动方向和距离。
- 更新蚂蚁的位置和路径,考虑启发式信息和局部搜索机制。
- 判断是否达到终点,如果达到则结束,否则回到步骤2。
- 输出最优路径。
3.2 动态实时规划算法
动态实时规划算法采用动态窗口算法,具体步骤如下:
- 初始化机器人的位置和窗口大小。
- 检测周围环境,判断是否有新的障碍物出现。
- 根据当前窗口大小和障碍物位置,计算新的路径。
- 更新机器人的位置和窗口大小。
- 判断是否到达目标位置,如果到达则结束,否则回到步骤2。
- 输出实时路径。
-
实验结果与分析
通过多项对比实验,对比了改进蚁群算法和动态窗口算法在静态和动态环境下的路径规划效果。实验结果表明,该方法能够在静态环境下找到最优路径,并在动态环境下能够及时调整路径,避开障碍物。相较于传统的路径规划算法,该方法在性能上有明显的提升。 -
结论与展望
本文提出了一种结合改进蚁群算法和动态窗口算法的路径规划方法,能够适应静态和动态环境。通过多项对比实验,证明了该方法的有效性和性能优势。未来可以进一步优化算法,提高路径规划的效果和性能,以满足更多实际应用场景的需求。
致谢:感谢所有参与本研究的人员的付出和支持。
参考文献:
[1] Dorigo, M., & Stützle, T. (2004). Ant colony optimization. MIT Press.
[2] Kala, R., & Singh, A. (2015). Dynamic Window Algorithm based Approach for Human-Robot Interaction. International Journal of Advanced Research in Computer Science and Software Engineering, 5(1), 106-111.
以上相关代码,程序地址:http://wekup.cn/717546605705.html















 251
251











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









