






三维的组合导航。
ins和卫星的组合导航算法,基于卡尔曼滤波和eskf滤波的都有。
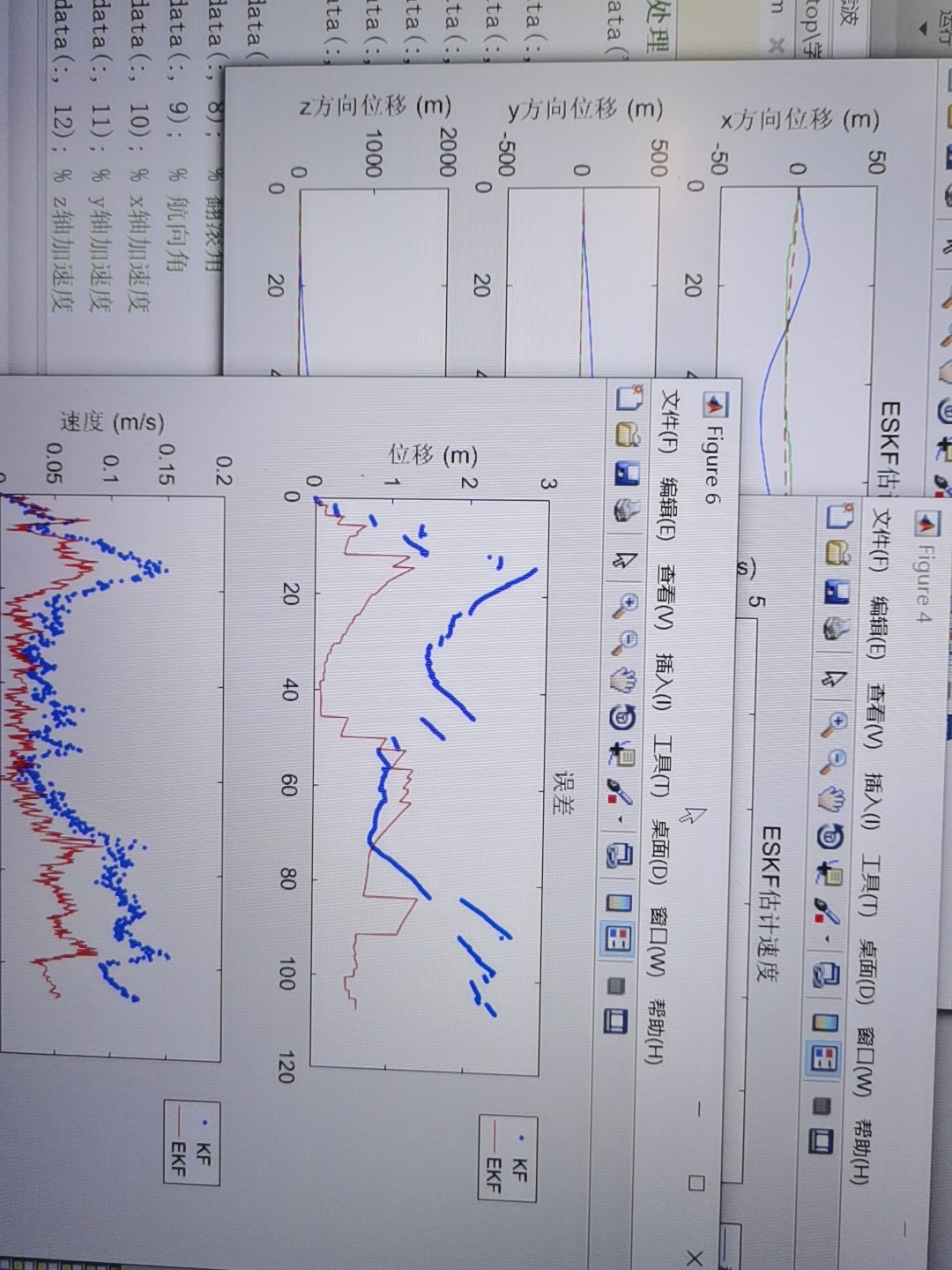
MATLAB源码,有kf和eskf的对比,也有单独的误差,或者输入滤波之后的位移速度等导航参数。
这段程序主要是一个卡尔曼滤波器,用于估计运动物体的位置和速度。它涉及到数据的读取、处理和滤波过程。
首先,程序通过`importdata`函数读取名为`ceshi.txt`的数据文件,并将数据存储在变量`data`中。
接下来,程序从`data`中提取出所需的数据,并将其存储在不同的变量中,如`gvx`、`gvy`、`gvz`等。这些变量代表了运动物体的速度和位置信息。
然后,程序对数据进行处理,计算出一些相关的量,如位移量和时间和。这些处理包括对速度和加速度进行积分,计算位移和时间和。
接下来,程序初始化一些变量,并创建一些空矩阵用于存储测量值和协方差矩阵。
然后,程序进入一个循环,从第二个数据点开始,计算一系列的矩阵和向量,包括转移矩阵、过程噪声协方差、观测矩阵等。然后,程序使用离散卡尔曼滤波公式对状态进行更新和校正,得到估计的位置和速度。
在循环的过程中,程序还计算了卡尔曼滤波器的误差,并将结果存储在一些变量中。
最后,程序绘制了一些图形来展示卡尔曼滤波器的结果,包括估计的位置和速度与测量值的比较,以及误差的分析。
此外,程序还定义了一个名为`kalman`的子函数,用于实现卡尔曼滤波的具体计算过程。该函数接受时间、加速度和GPS测量值作为输入,并返回估计的速度和位置。
总的来说,这段程序主要是为了通过卡尔曼滤波器来估计运动物体的位置和速度。它涉及到数据的读取、处理、滤波过程以及结果的分析和可视化。在实际应用中,这种方法可以用于航空航天、导航和自动驾驶等领域,以提高位置和速度的精确度和稳定性。
YID:6645673324929162
hh的zy
三维的组合导航在现代导航系统中起到了至关重要的作用。其中,ins和卫星的组合导航算法是一种常见的技术手段,并且基于卡尔曼滤波和eskf滤波的方法都具备广泛的应用前景。
在组合导航中,ins和卫星的结合是一种常见的测量与导航融合技术。ins(惯性导航系统)是基于惯性传感器(如加速度计和陀螺仪)来测量运动物体的加速度和角速度,并通过积分获得速度和位置信息的一种方法。而卫星导航则是通过接收卫星信号(如GPS信号)来测量运动物体的位置和速度。将这两种测量方式进行组合,可以提高导航系统的精度和稳定性。
其中,卡尔曼滤波和eskf滤波是两种常见的组合导航算法。卡尔曼滤波是一种基于统计学原理的滤波器,通过对当前状态和测量值的不确定性进行建模,来进行状态估计和滤波。它通过预测和校正两个步骤,可以在测量值和预测值之间进行动态权衡,从而获得更准确的状态估计结果。
而eskf滤波(扩展卡尔曼滤波)是一种对卡尔曼滤波进行扩展的方法,它在卡尔曼滤波的基础上引入了非线性系统模型,可以处理一些非线性系统的状态估计问题。通过使用非线性函数来近似系统的非线性特性,eskf滤波可以更准确地估计运动物体的状态,并提供更稳定的导航性能。
在具体的实现过程中,MATLAB是一种常用的工具,可以用来实现ins和卫星的组合导航算法,并进行相关的数据处理和滤波过程。该程序通过importdata函数读取名为ceshi.txt的数据文件,将数据存储在变量data中。然后,程序从data中提取出所需的数据,如速度和位置信息,并将其存储在不同的变量中。
接下来,程序对数据进行处理,计算出一些相关的量,如位移量和时间和。这些处理包括对速度和加速度进行积分,计算位移和时间和。这样做的目的是为了获取更准确的位移和时间信息,从而提高导航系统的精度和稳定性。
程序还初始化了一些变量,并创建了一些空矩阵用于存储测量值和协方差矩阵。这些变量和矩阵在后续的滤波过程中起到了重要的作用。
接下来,程序进入一个循环,从第二个数据点开始,计算一系列的矩阵和向量,包括转移矩阵、过程噪声协方差、观测矩阵等。这些矩阵和向量的计算是基于卡尔曼滤波和eskf滤波的原理,并通过离散卡尔曼滤波公式对系统的状态进行更新和校正,从而得到估计的位置和速度。
在循环的过程中,程序还计算了卡尔曼滤波器的误差,并将结果存储在一些变量中。这些误差结果可以用来评估导航系统的性能,并进行误差分析和优化。
最后,程序绘制了一些图形来展示卡尔曼滤波器的结果,包括估计的位置和速度与测量值的比较,以及误差的分析。这些图形可以直观地反映出滤波器的性能和导航系统的稳定性。
总的来说,这段程序通过卡尔曼滤波器来实现ins和卫星的组合导航算法,可以估计运动物体的位置和速度。它涉及到数据的读取、处理和滤波过程,并通过结果的分析和可视化来评估导航系统的性能。在实际应用中,这种方法可以广泛应用于航空航天、导航和自动驾驶等领域,以提高位置和速度的精确度和稳定性。
以上就是关于三维的组合导航的一些简要介绍和程序实现过程的详细说明。希望通过这篇文章的阐述,读者能够对组合导航的基本原理和实现方法有更深入的了解,并在实际应用中能够灵活运用和优化。
相关的代码,程序地址如下:http://coupd.cn/673324929162.html
















 4108
4108











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









