






汽车ESP系统仿真建模,基于carsim与simulink联合仿真做的联合仿真,采用单侧双轮制动的控制方法。
有完整的模型和说明。
ESP;横摆角速度;质心侧偏角;模糊PID
通过对汽车ESP系统的特性分析,选取车辆横摆角速度和质心侧偏角作为控制量,基于模糊PID控制理论。
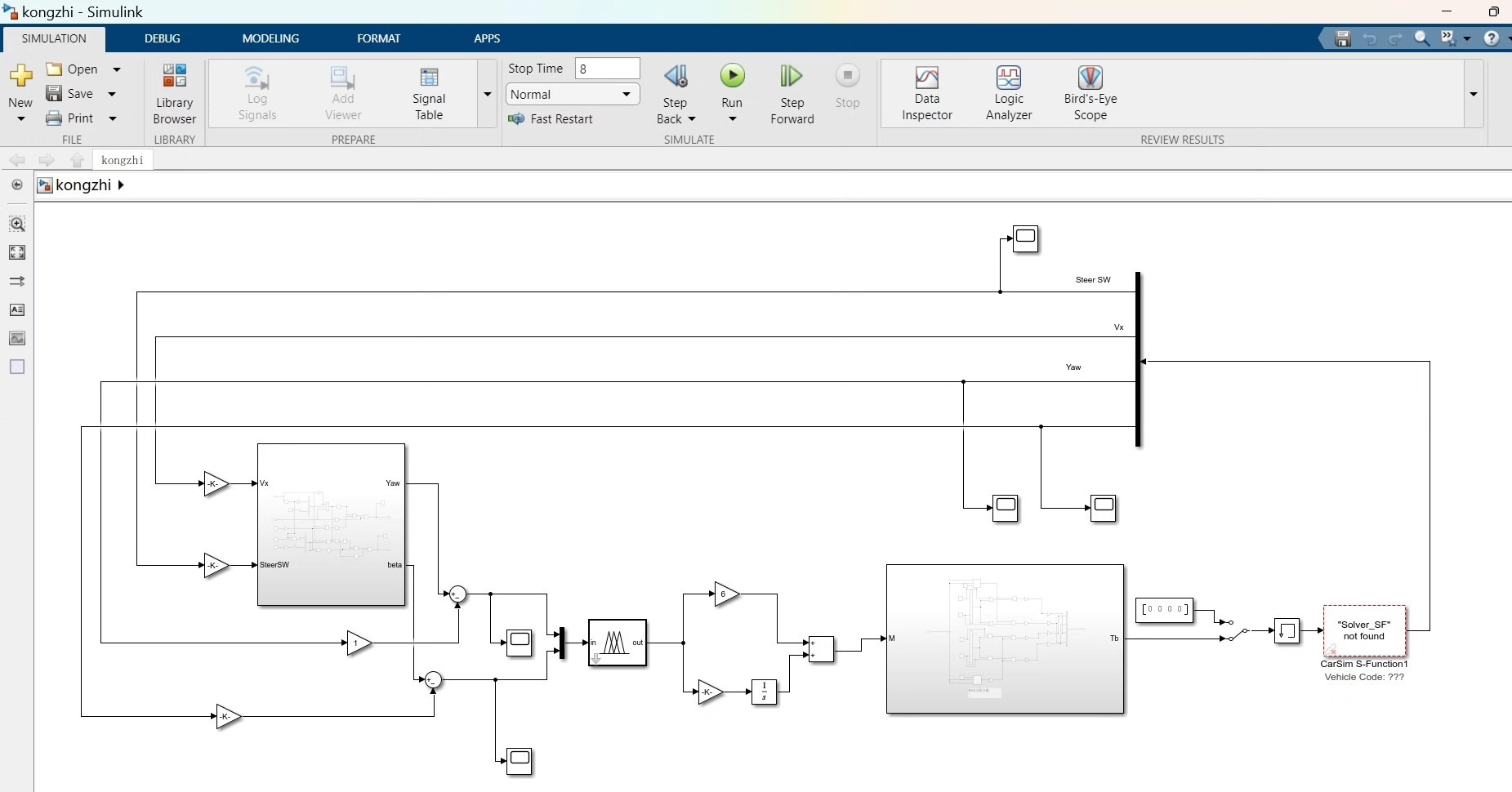
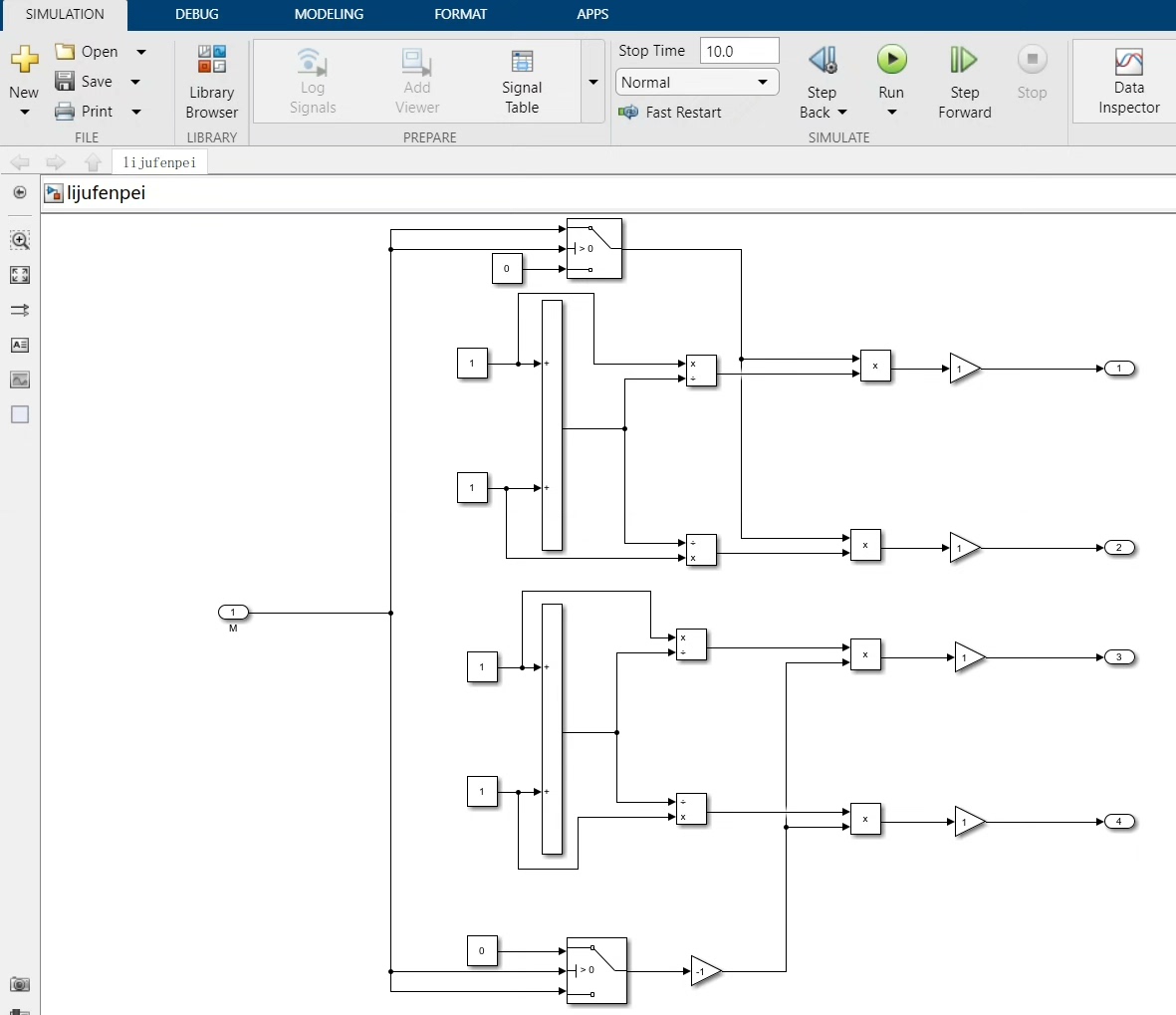
在MATLAB/Simulink中建立ESP控制器模型.根据控制器计算出附加横摆力矩,选用单侧双轮制动的控制策略来确定施加在各车轮的制动力矩。
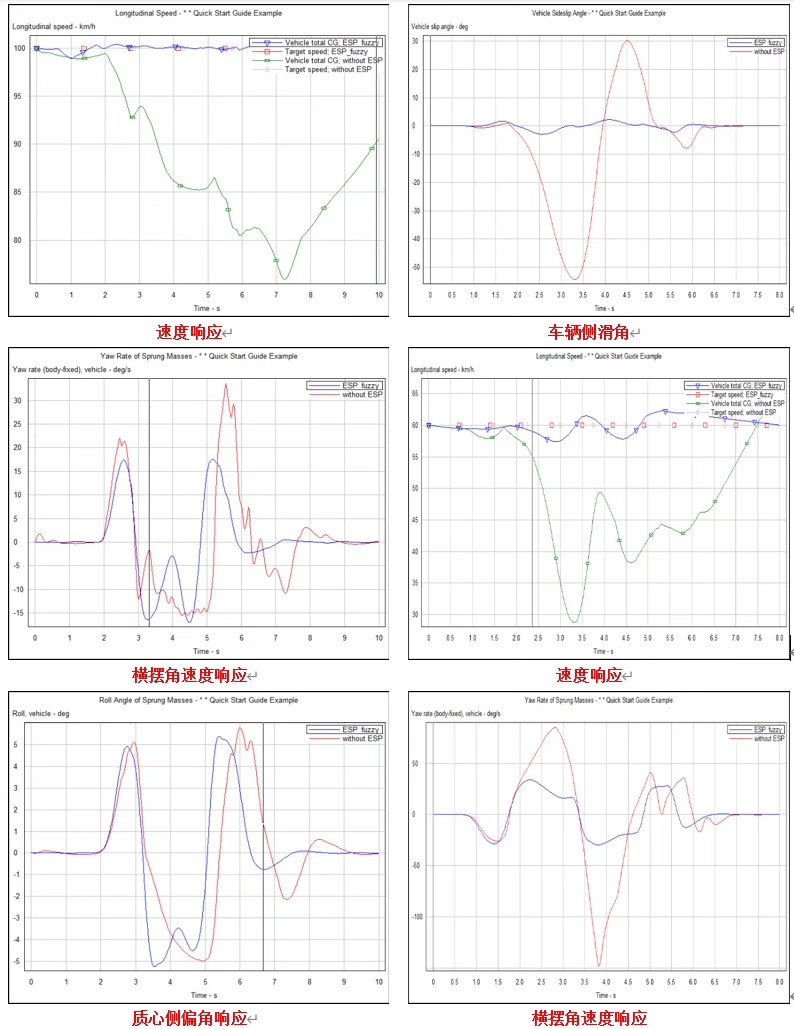
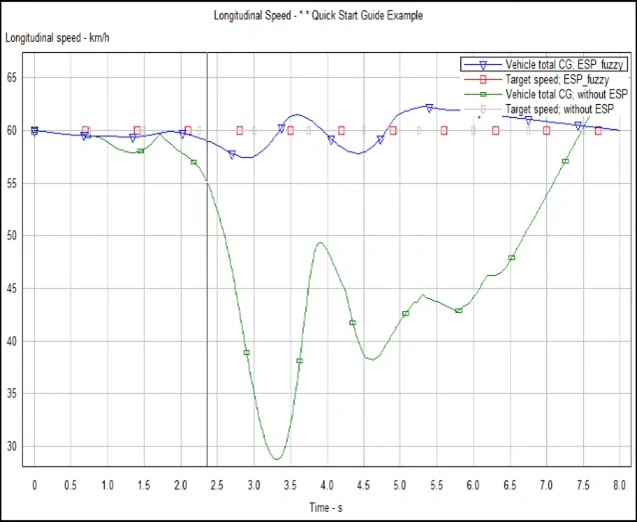
利用Carsim软件中的整车动力学模型,搭建Carsim与Simulink的联合仿真软件平台,在不同工况下进行双移线和紧急避让试验。
ID:7212762124827588
ICAR汽车设计
汽车ESP系统仿真建模,是指通过模拟和模拟实验的方法,对汽车ESP系统的工作原理和性能进行研究和分析,以提高其稳定性和安全性。其中,ESP系统是车辆动态稳定控制系统的一种,用于减少车辆在转弯时的侧滑和失控现象,提高车辆的操控性和安全性。
在汽车ESP系统仿真建模中,基于Carsim与Simulink的联合仿真技术是一种有效的方法。Carsim是一种用于整车动力学模拟和仿真的软件,它可以对车辆的运动学和动力学进行建模和分析。Simulink是一种用于系统建模和仿真的工具,可以对控制器进行建模和仿真。
在汽车ESP系统仿真建模过程中,我们选取车辆的横摆角速度和质心侧偏角作为控制量。横摆角速度是车辆在转弯时发生横向滑动的速度,质心侧偏角是车辆质心相对于车辆中心线的侧面偏移角度。这两个参数可以反映车辆的操控性和稳定性。
为了对汽车ESP系统进行控制,我们采用了模糊PID控制理论。PID控制是一种常用的控制方法,可以通过调整控制器的比例、积分和微分参数来实现对系统的控制。而模糊控制则是在PID控制的基础上引入模糊逻辑,通过模糊规则和模糊推理来调整PID控制参数,以适应不同工况下的控制需求。
在MATLAB Simulink中,我们建立了ESP控制器模型。该模型可以根据车辆的横摆角速度和质心侧偏角,计算出附加的横摆力矩。为了实现控制效果,我们采用了单侧双轮制动的控制策略,通过调整施加在各车轮上的制动力矩来实现对车辆的稳定控制。
为了验证汽车ESP系统的控制效果,我们利用Carsim软件中的整车动力学模型,搭建了Carsim与Simulink的联合仿真平台。通过在不同工况下进行双移线和紧急避让试验,我们可以评估汽车ESP系统在不同情况下的控制性能和安全性。
综上所述,汽车ESP系统仿真建模是一种有效的方法,可以通过模拟和仿真实验来分析和改善汽车ESP系统的性能和安全性。通过选取车辆的横摆角速度和质心侧偏角作为控制量,基于模糊PID控制理论,建立ESP控制器模型,并采用单侧双轮制动的控制策略,可以实现对车辆的稳定控制。通过Carsim与Simulink的联合仿真平台,可以对汽车ESP系统在不同工况下的控制效果进行评估和验证。这种方法可以为汽车制造商和研发人员提供重要的参考和指导,以提高汽车的操控性和安全性。
如果你对这个话题感兴趣或者有其他问题,欢迎点击“加好友”联系我。
以上相关代码,程序地址:http://fansik.cn/762124827588.html
















 1774
1774

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









