






基于Carsim和Simulink联合仿真的线控转向模型及其控制策略研究
随着汽车智能化、网络化的飞速发展,线控转向已经成为现代汽车的重要部分。为了更好地理解线控转向的性能和优化其控制策略,本文提出了一套基于Carsim和Simulink联合仿真的线控转向模型,并对其中的理想传动比和前轮转角控制策略进行了深入研究。
一、模型构建
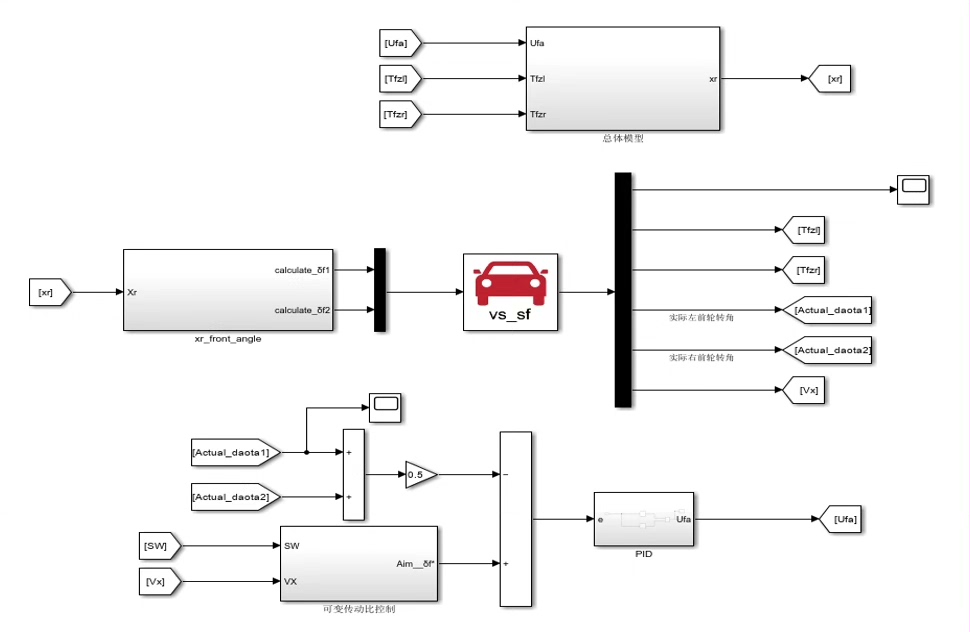
这套模型详细地复现了线控转向的关键组成部分,包括方向盘模块、路感模拟模块、转向执行模块、齿轮齿条模块以及左右前轮模块等。通过对每个子进行单独建模,最终实现了联合仿真实验,确保了模型的精确性和实用性。
二、理想传动比控制策略
理想传动比是线控转向中的重要参数,它直接影响到车辆的操控性能和稳定性。本文提出了适应不同车速工况的理想传动比控制策略。该策略将车速分为低速段、中速段、高速段等区间,针对每个区间设计了相应的控制策略。
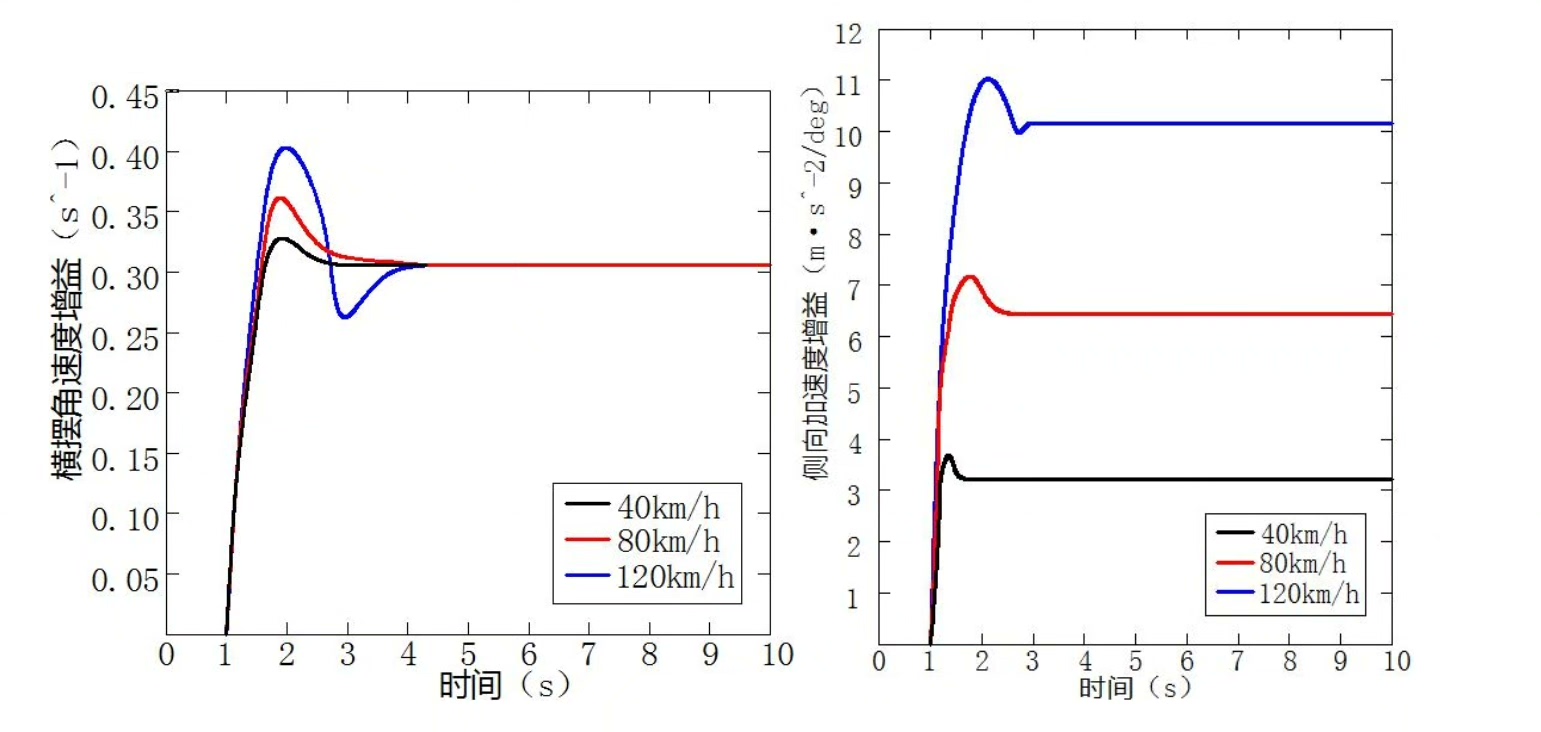
在低速段,为了提供足够的转向灵活性和路感,传动比应设置得较小。在中速段,为了保持车辆的稳定性和操控性,传动比应保持在一个适中的水平。在高速段,为了提供更好的车辆稳定性,传动比应适当增大。同时,本文提出了基于参数拟合和定转向增益不变控制法中的稳态横摆角速度增益不变的理想传动比设计方法,使传动比能够根据车辆的行驶状态进行实时调整。
三、前轮转角控制策略
前轮转角是线控转向的另一个重要参数,它直接影响到车辆的行驶轨迹和稳定性。本文研究了基于稳态横摆角速度增益不变的前轮转角控制策略。该策略通过控制前轮的转角,使车辆在转弯时能够保持稳定的横摆角速度,从而提高车辆的操控性和稳定性。
四、模型验证及实验结果
通过Carsim和Simulink的联合仿真实验,验证了该线控转向模型的准确性和实用性。实验结果表明,该模型能够准确地模拟线控转向的关键组成部分和工作过程,同时,理想传动比和前轮转角控制策略的引入,进一步提高了车辆的操控性能和稳定性。
五、结论
本文提出了一套基于Carsim和Simulink联合仿真的线控转向模型,并对其中的理想传动比和前轮转角控制策略进行了深入研究。该模型具有较高的精确性和实用性,为线控转向的设计和优化提供了有力的支持。同时,该研究也为汽车智能化、网络化的发展提供了重要的参考。
线控转向联合仿真模型及控制策略研究
商品描述: 本商品提供了一套基于Carsim和Simulink联合仿真的线控转向模型,包括理想传动比和前轮转角控制策略的研究。
该模型详细复现了线控转向的关键组成部分,如方向盘模块、路感模拟模块、转向执行模块、齿轮齿条模块以及左右前轮模块。
通过对每个子单独建模,最终实现联合仿真实验,确保了模型的精确性和实用性。
主要特点:
理想传动比控制策略: 提出了适应不同车速工况的理想传动比控制策略,通过设置低速段、中速段、高速段等车速区间,设计了基于参数拟合和定转向增益不变控制法中的稳态横摆角速度增益不变的理想传动比。
前轮转角控制策略: 研究了基于稳态横摆角速度增益不变的传动比控制策略,并利用改进自适应遗传算法优化了稳态横摆角速度增益的选择,得出不同车速下的最佳增益值。
同时,采用模糊控制对高速段传动比的变化规律进行优化,最终确定理想传动比,并提出了前轮转角前馈补偿和综合反馈控制策略。
联合仿真验证: 利用Carsim和Matlab/Simulink联合建立的线控转向整车模型,选取典型工况,在不同的试验条件下对控制策略进行仿真验证,确保了控制策略的有效性和可靠性。
技术参数:
支持:Matlab2019a及以上版本。
模型包含:方向盘模块、路感模拟模块、转向执行模块、齿轮齿条模块、左右前轮模块。
控制策略:理想传动比控制、前轮转角控制。
附加文档:
提供详细的说明文档,ppt文档,包括模型搭建步骤、控制策略设计、仿真验证结果等。
适用场景: 适用于高校、研究机构及企业在汽车线控转向领域的研究与开发,特别适合进行动力学分析、控制策略设计和仿真验证。
须知:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









