






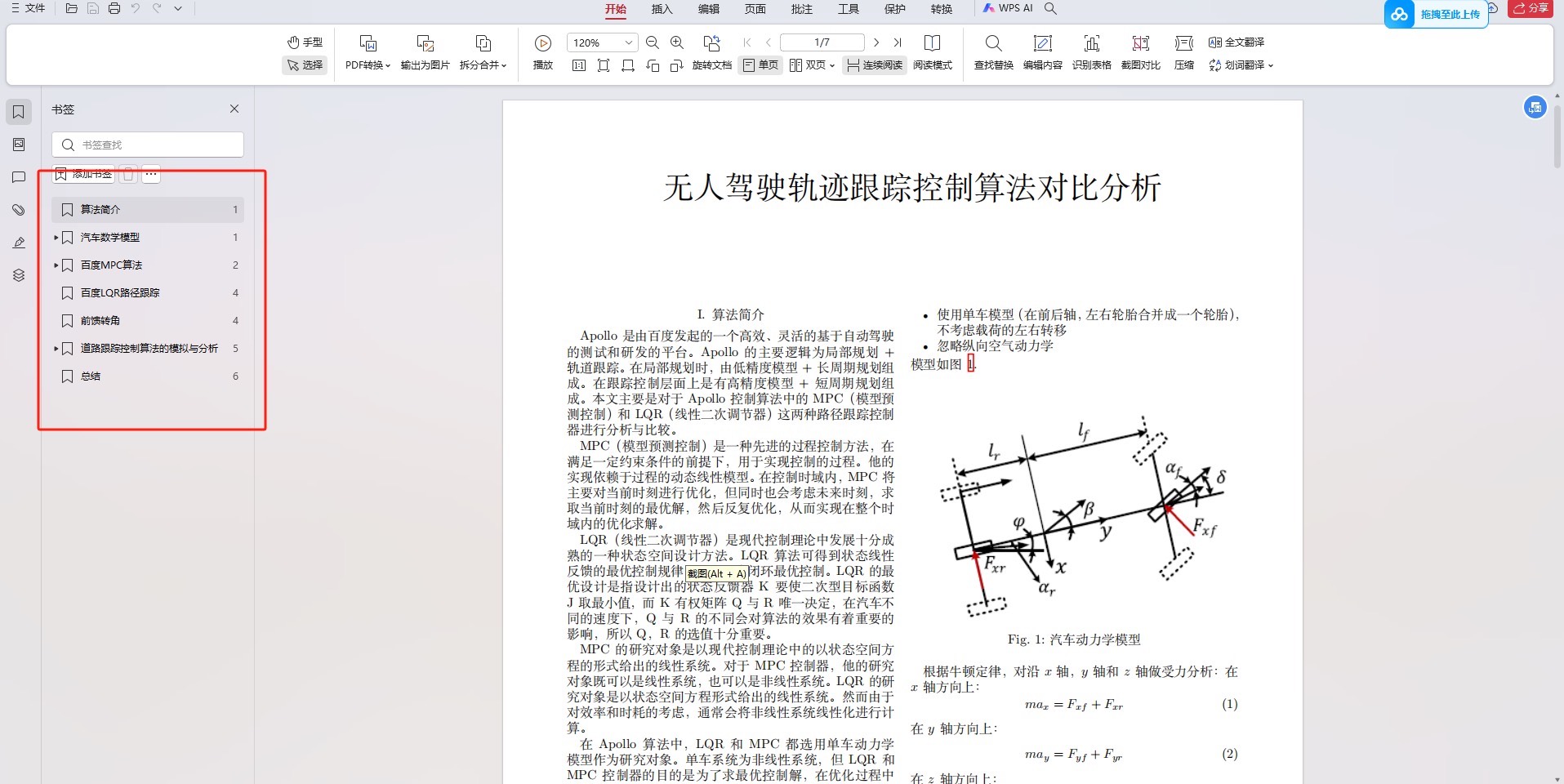
基于Apollo MPC、Apollo LQR、PP算法的车辆路径跟踪控制对比仿真
一、说明文档
本文档旨在详细分析、仿真并对比基于Apollo MPC、Apollo LQR以及PP算法的车辆路径跟踪控制。我们将从汽车动力学模型、方向盘控制模型、横纵控制状态变量、预测状态模型分析以及算法效果分析等方面进行详细阐述。
二、理论分析
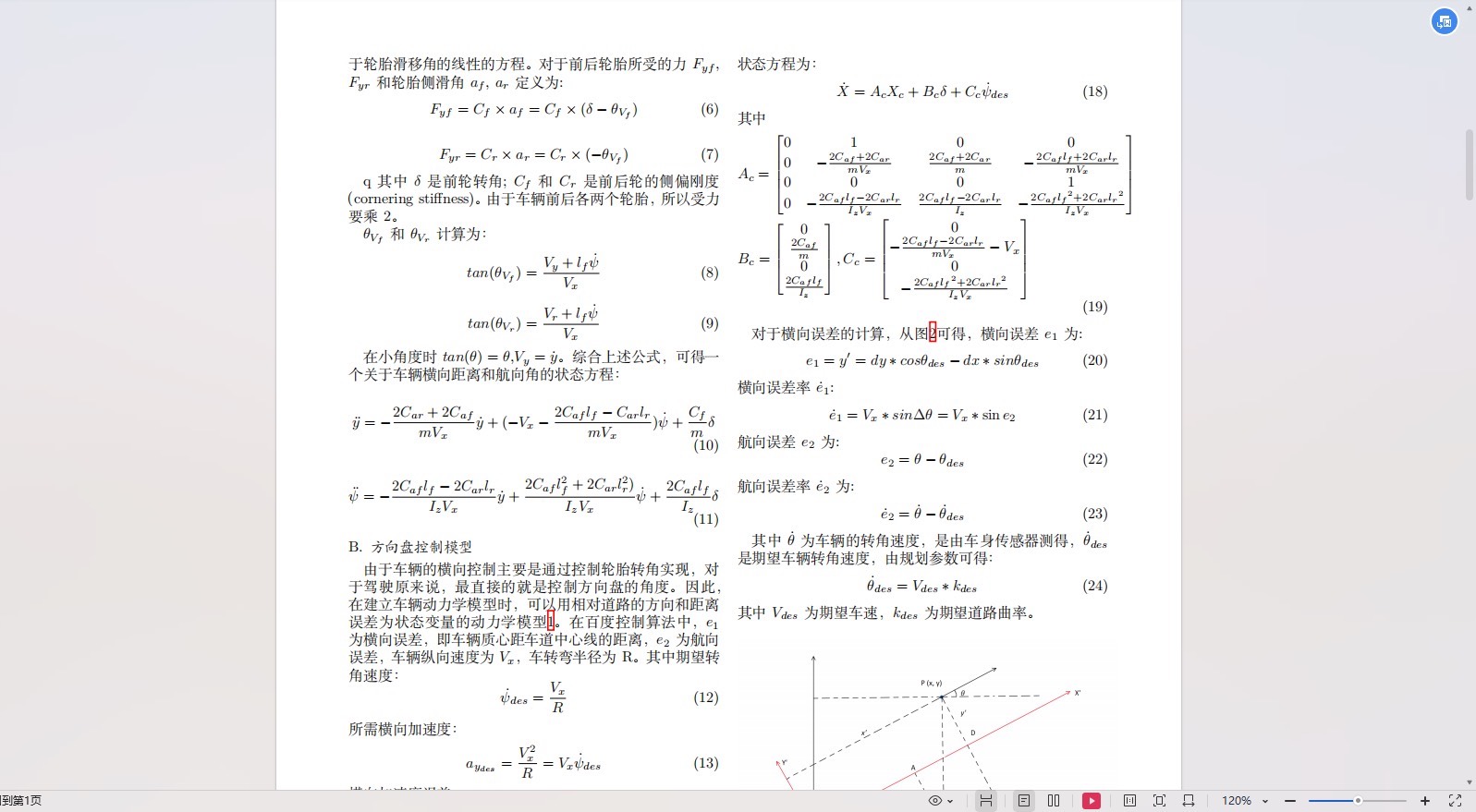
- 汽车动力学模型
汽车动力学模型是路径跟踪控制的基础。考虑到车辆的运动学特性,我们将采用二自由度模型,即纵向速度和横向位置作为控制目标。
- 方向盘控制模型
方向盘控制模型基于转向角度和车速,通过计算得出合适的转向角度,以实现车辆的路径跟踪。
- 横纵控制状态变量
横纵控制状态变量包括车辆的横向位置、纵向速度以及方向盘角度等,这些变量将用于评估和控制车辆的路径跟踪效果。
三、仿真搭建
- 仿真环境设定
模拟的赛道由直道和弯道组成,无障碍物。车辆从距离赛道原点横向两米的位置为起点开始仿真。
- 算法实现
分别实现Apollo MPC、Apollo LQR和PP算法,并集成到仿真环境中。
四、仿真分析
- 预测状态模型分析
对于MPC和LQR算法,我们需要构建预测模型以预测车辆未来的状态。这些模型将基于汽车动力学模型和方向盘控制模型进行构建。对于PP算法,其预测是基于几何关系的纯跟踪算法。
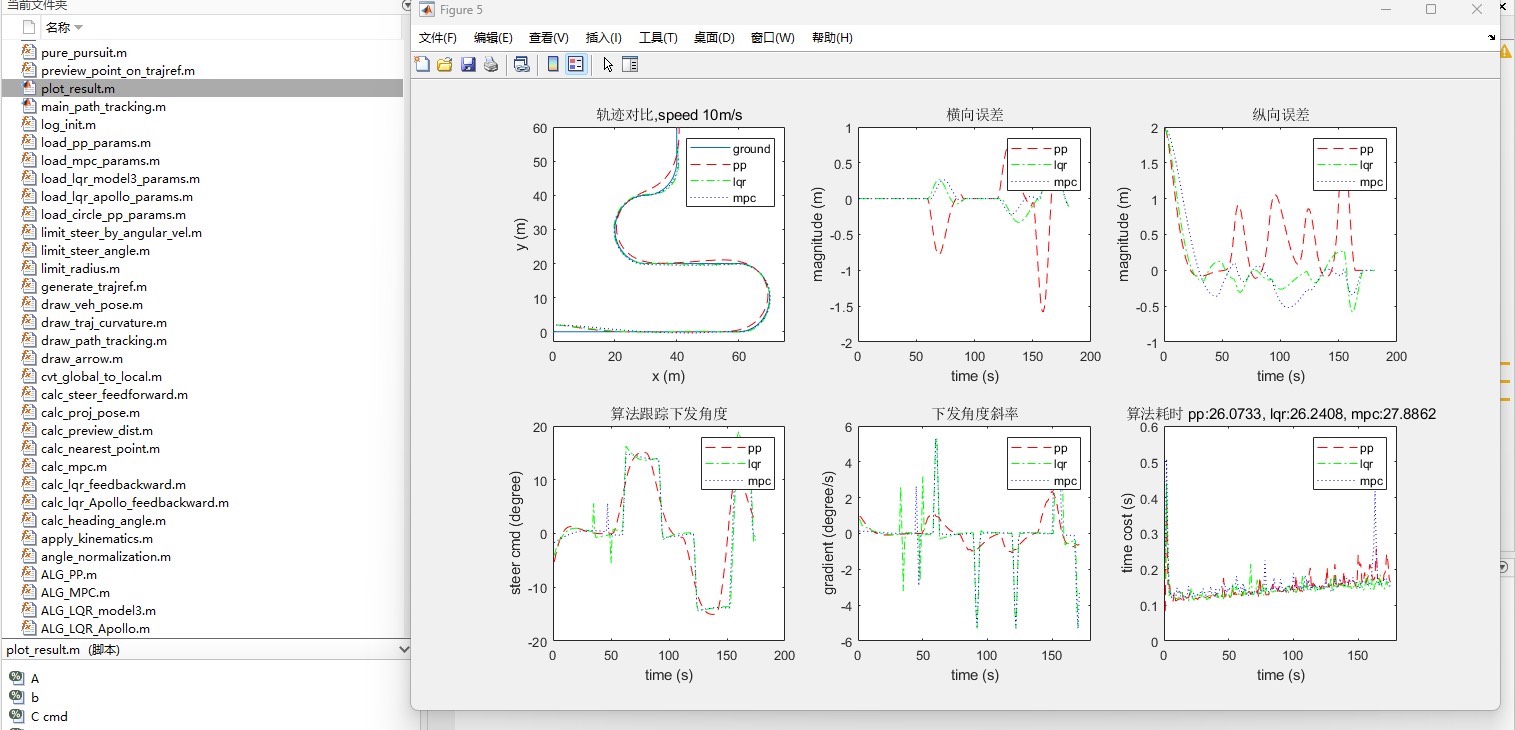
- 算法效果分析
在仿真过程中,我们将分别记录三种算法的路径跟踪效果,包括跟踪误差、跟踪速度等指标。通过对这些指标的分析,我们可以评估每种算法的优劣。
五、三种算法对比
- Apollo MPC横纵向模型预测控制
MPC通过构建一个优化问题,来找到最优的控制输入以最小化跟踪误差。其优点在于能够考虑未来的状态和约束,从而实现更平滑的路径跟踪。
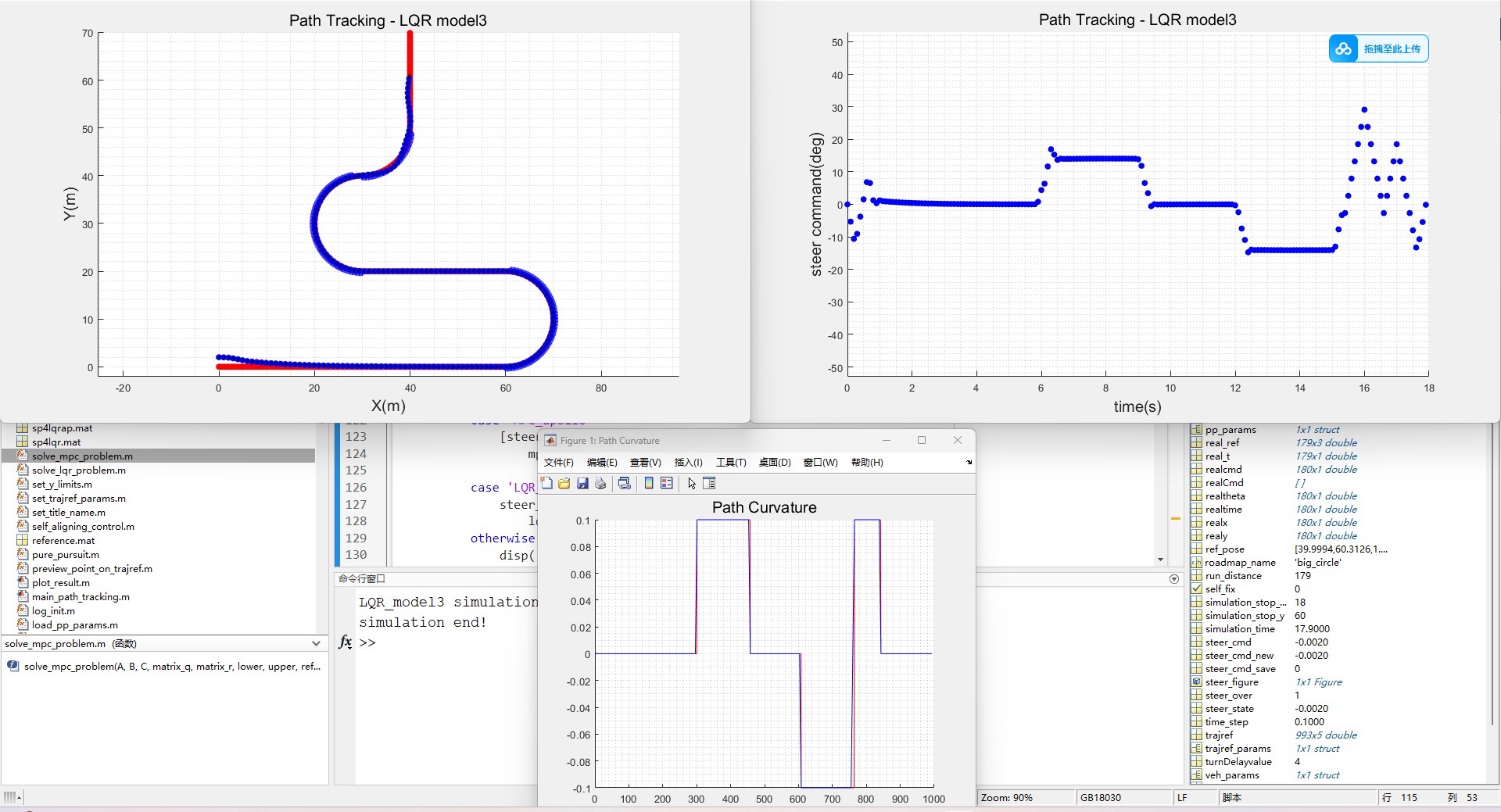
- Apollo LQR横向路径跟踪控制
LQR通过线性化模型并设计一个线性反馈控制器来实现路径跟踪。其优点在于计算简单,但可能对非线性的适应性较差。
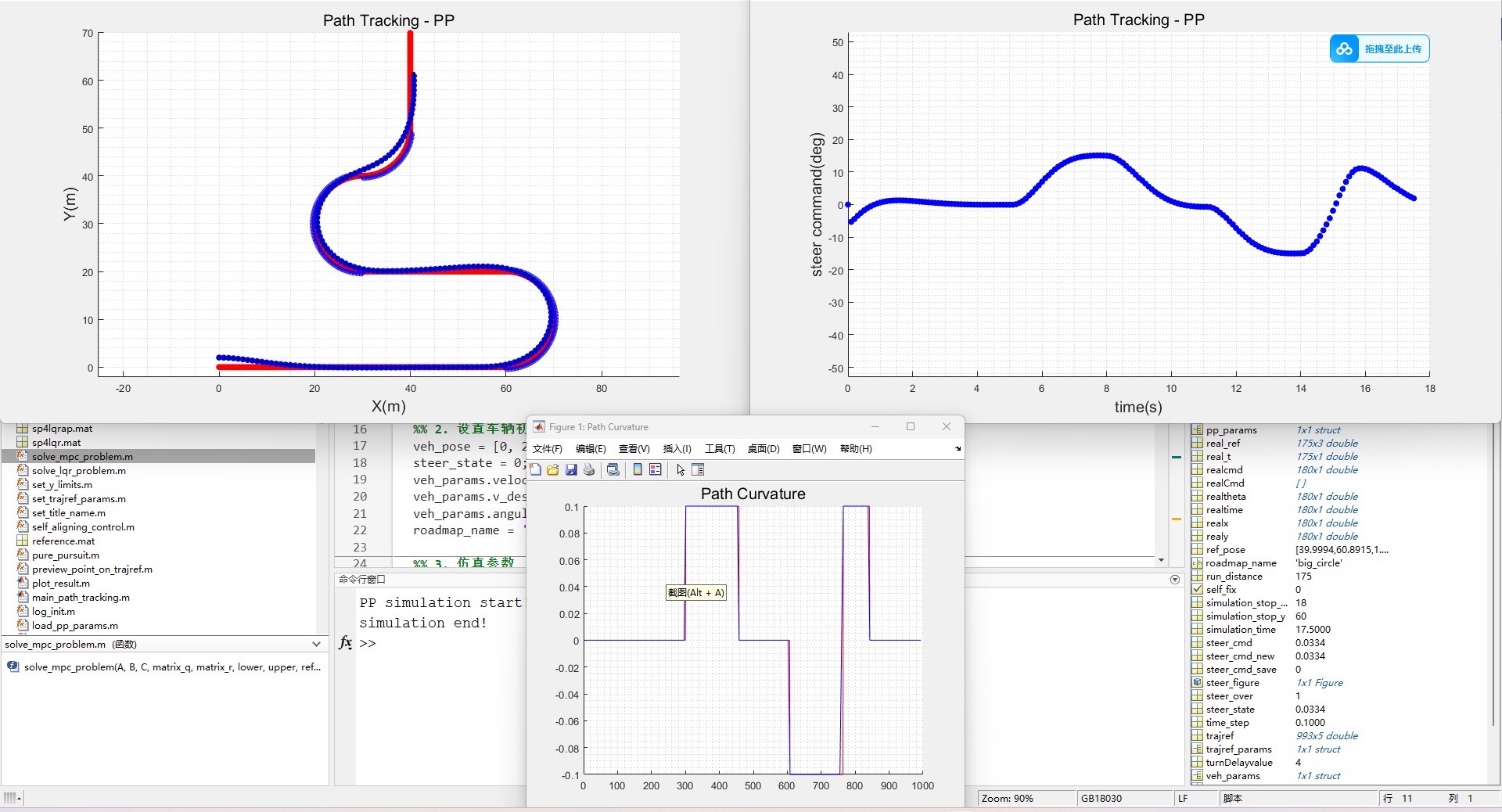
- PP算法路径跟踪控制
PP算法基于纯跟踪几何关系进行路径跟踪。其优点在于简单易实现,但在复杂环境下可能存在跟踪误差较大的问题。
六、模拟结果与讨论
我们将对比三种算法的模拟结果,分析其各自的优缺点,并讨论在实际情况中如何选择合适的算法。同时,我们将提供程序附带中文注释,以便于学习理解。如有需要,我们还可以提供付费讲解指导服务。
七、总结与展望
本文对基于Apollo MPC、Apollo LQR和PP算法的车辆路径跟踪控制进行了详细的对比分析。未来,我们还将继续研究更先进的算法,以提高车辆的路径跟踪性能和安全性。
基于apollo MPC、apollo LQR、PP(纯跟踪)算法的车辆路径跟踪控制对比仿真【附说明文档】
附带一份详细理论分析、仿真搭建、仿真分析说明文档
内容:汽车动力学模型、方向盘控制模型、横纵控制状态变量、预测状态模型分析、算法效果分析
三种算法对比:
①MPC横纵向模型预测控制
②LQR横向路径跟踪控制
③PP算法路径跟踪控制
算法的对比:PP, Apollo LQR, Apollo MPC。
模拟的环境是一个没有障碍物的赛道,赛道由直道和弯道组合而成。
车辆会先从距离赛道原点横向两米的位置为起点,向预定道路靠拢。
模拟的目标是为了让汽车成功尽可能的平滑
和正确的跟随给定轨迹到达终点。
程序附带中文注释便于学习可以提供付费讲解指导服务。


















 854
854

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









