






健康是维系人类生活的根本要素,而健康的公民则是推动经济发展和社会稳定的核心力量。目前,医疗保健可达性的研究普遍采用到达医院所需时间作为衡量指标,这一方法不仅直观易懂,而且便于进行大规模分析。这些数据集对于政府卫生部门至关重要,它们可以用来优化资源配置、识别服务短缺区域,并制定出针对性的策略。最终,这些措施将有助于提升中国公共卫生的整体成效,并有效缩小医疗保健服务的差距。中国医院可达性数据集,以驾驶旅行时间作为基准,包含各省市县到最近的医院及最近的一、二、三级医院的旅行时间。该数据集使用 OpenStreetMap数据和Contraction Hierarchies寻路算法计算了定居点与全国最近医院之间的旅行时间。根据旅行时间计算、WorldPop 数据和医疗设施容量,采用Ga2SFCA模型来评估全国医院的可达性。
数据来源
道路网络数据来源于OSM、人口数据来源于WorldPop、医疗机构数据来源于药智数据、医院地理坐标来源于百度地图,团队人工整理,全部内容真实有效。
数据范围
省、地级市、区县级
时间跨度
2020
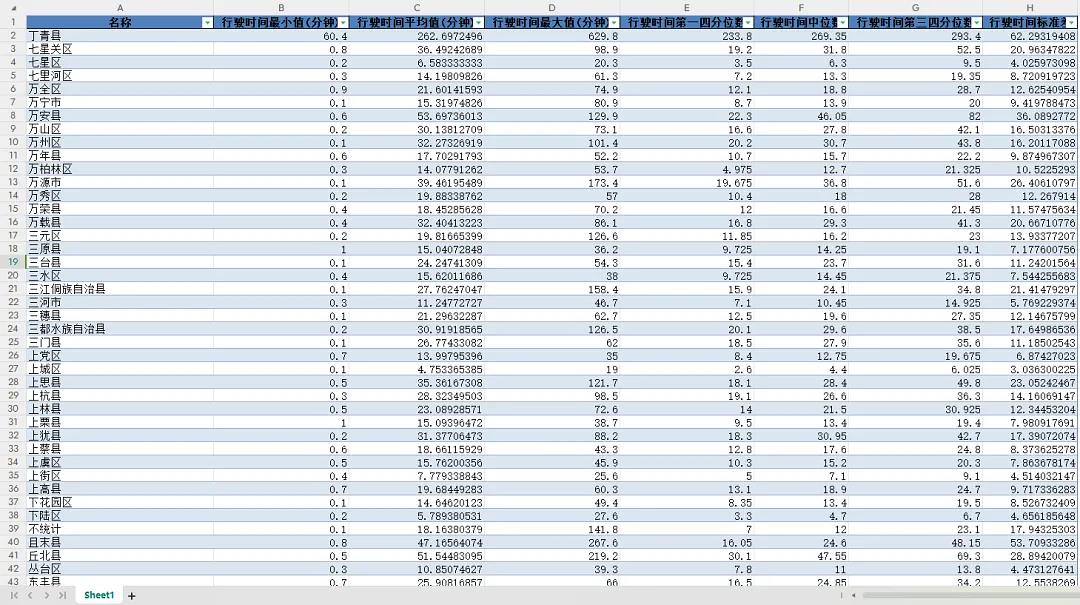
数据格式
数据格式为Excel形式
数据指标
前往最近医院行驶时间
前往最近一级医院行驶时间
前往最近二级医院行驶时间
前往最近三级医院行驶时间
医院可达性基尼系数
数据展示
参考文献
[1]Ye, P., Ye, Z., Xia, J. et al. National-scale 1-km maps of hospital travel time and hospital accessibility in China. Sci Data 11, 1130 (2024).
【下载→
方式一(推荐):主页↓个人↓简介
经管数据库-CSDN博客
方式二:数据下载地址汇总-CSDN博客

















 8372
8372

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









