







 超级会员免费看
超级会员免费看
【inpho精品教程】02 创建工程
本文讲解利用ApplicationsMaster 8.0创建无人机获取的影像工程,包括相机的创建,影像数据、POS信息、控制点数据的导入,航带的创建等相关内容。
一、数据准备
1.相机参数
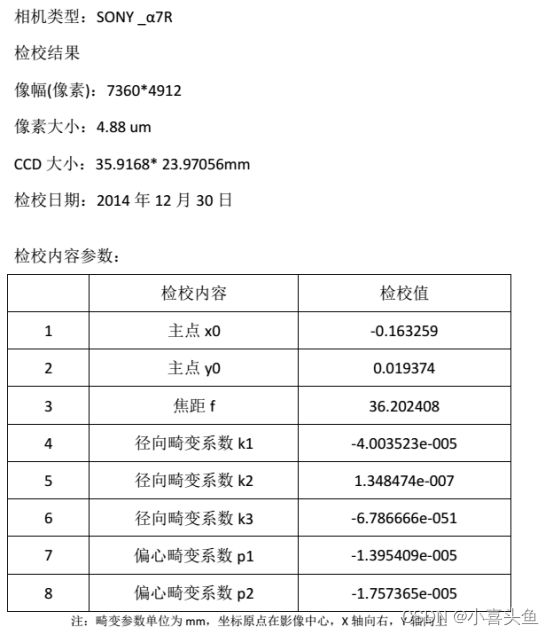
inpho软件对数据要求较高,需要提供准确的相机参数。由于国内外针对无人机镜头采用不同的检校模型,所以国内无人机相机检校参数不能直接输入inpho,建议先去除畸变,使用去除畸变影像在inpho进行后序处理;此时主点偏移,畸变参数均为0;
1)对于有准确相机检校报告的影像,可以直接通过去畸变软件进行影像的去畸变操作,推荐去畸变软件:LensDistortion;
2)当没有相机参数或者相机检校参数不准时,需要在创建工程前对数据进行预处理,可以通过Agisoft Metashape 、ContextCapture、Pix4d软件进行一遍空三计算,反算出相机参数,再导出去畸变的图像。
2.影像数据
去畸变的图像
3.pos数据
4.控制点数据
需要提供控制点成果和点之记成果
二、创建项目
以inpho8.0 创建无人机数据项目为例
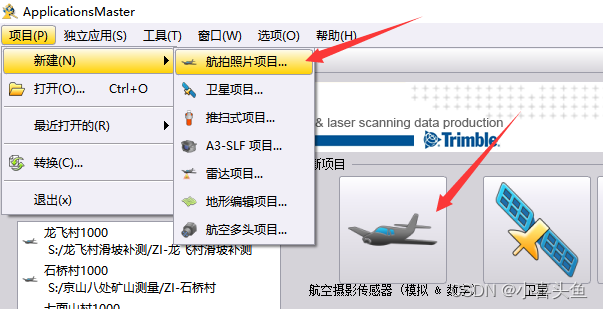
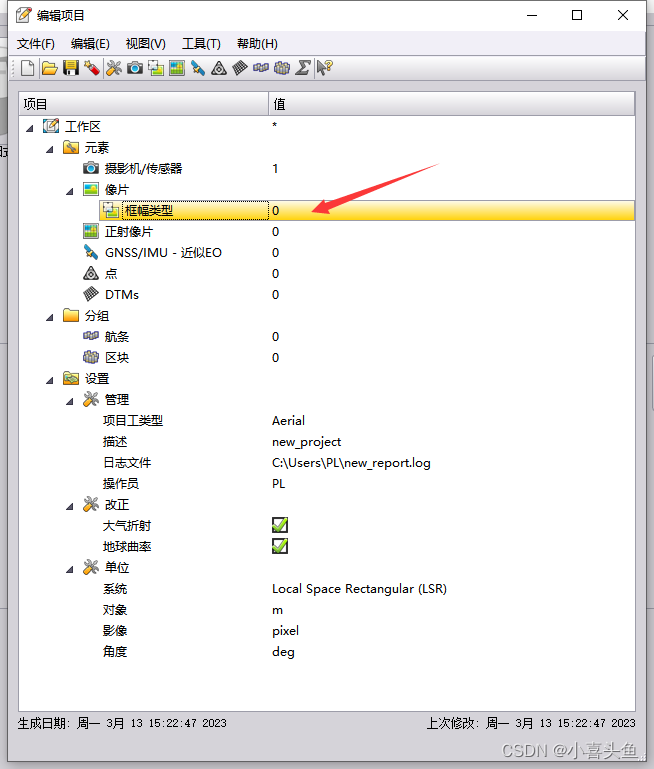
项目–新建—航拍照片项目,或者单击航空摄影传感器图标
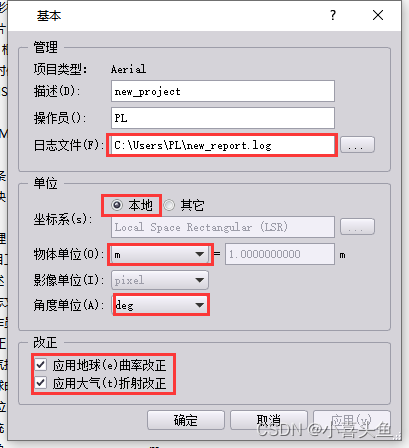
一般航摄仪获取的数据或者无人机相机获取的影像,默认勾选即可
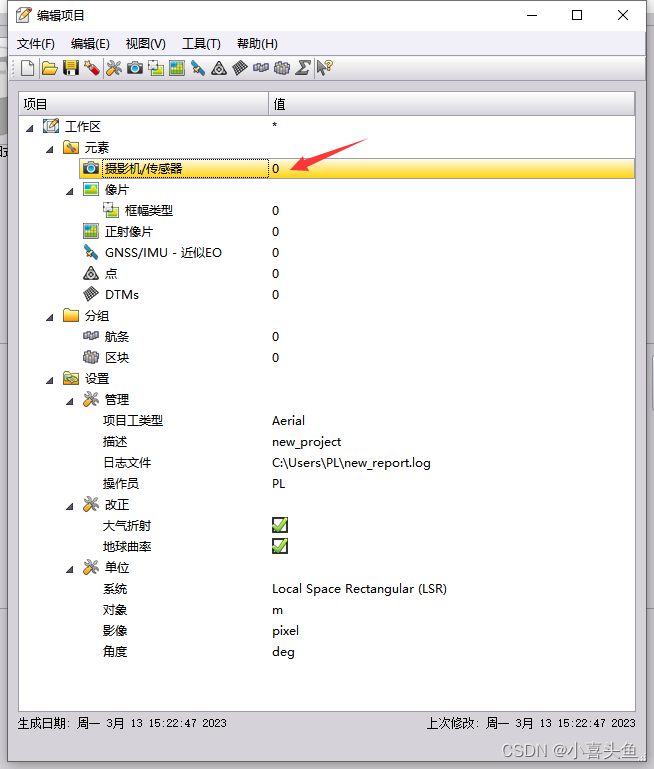
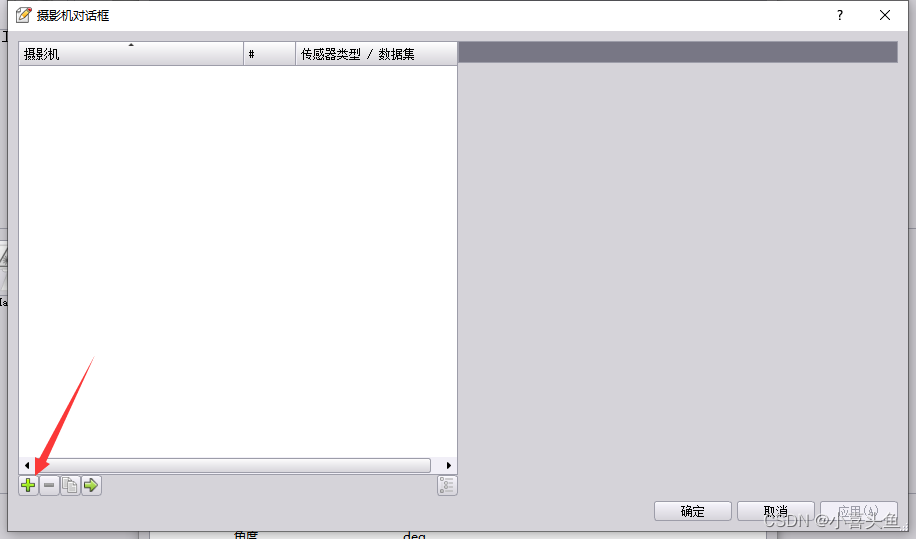
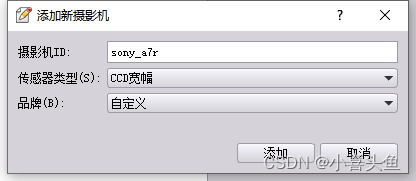
三、新建相机
鼠标双击,打开摄影机对话框
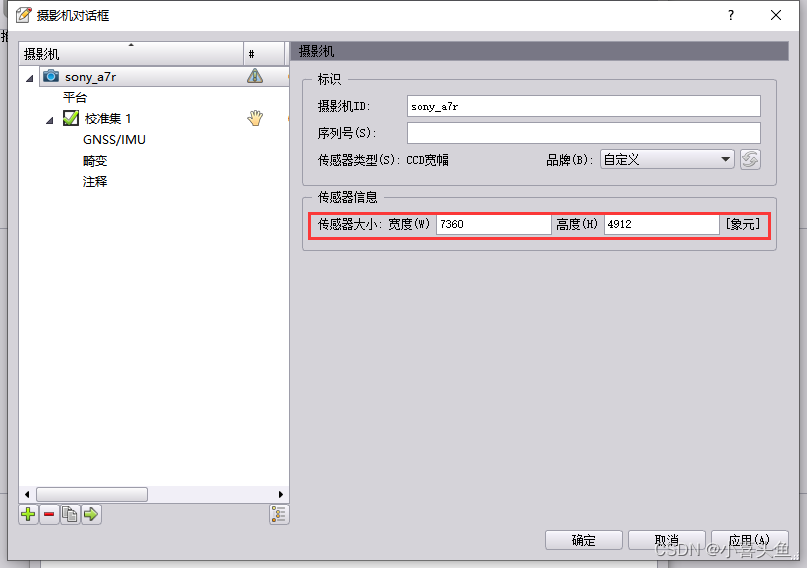
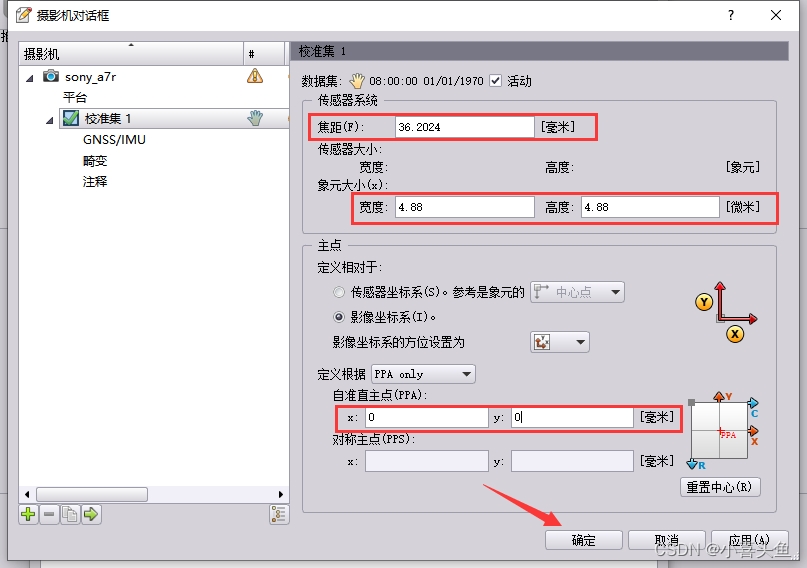
输入焦距,像元大小,主点偏移参数0,0(去完畸变后为0,其他畸变参数也无需填写)。对于其他带有畸变参数的影像数据可根据实际情况进行填写,此处以去完畸变后影像为例。
Inpho中输入主点偏移的时候可以选择像素单位或者mm单位;像素单位时国内检教一般为左下角为起算点,inpho设置有中心和左上角起算,所以像素单位检教文件推荐换算成mm单位后导入inpho。
设置像方坐标系x轴正方向时,一般情况下,原始数据没有经过其他三方软件空三预处理时,x轴指向飞行方向(垂直于宽边 或者
或者
),才能与pos信息中的kappa角匹配上;注:如果无人机数据经过如pix4d或者photoscan经过预处理后使用其pos时,因为其软件默认无论影像如何放置,x轴均指右,此时inpho设置相机文件时选择x轴向右指向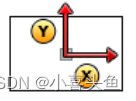 ,才能与pos中kappa角对应。
,才能与pos中kappa角对应。
·对于大像幅专业量测相机
如果没有主点偏移和畸变参数,其设置与去除畸变的无人机工程设置一样
如果有主点偏移,需要根据影像是否旋转设置两个相机文件,其中一个相机x轴翻转180,主点取反
四、导入影像
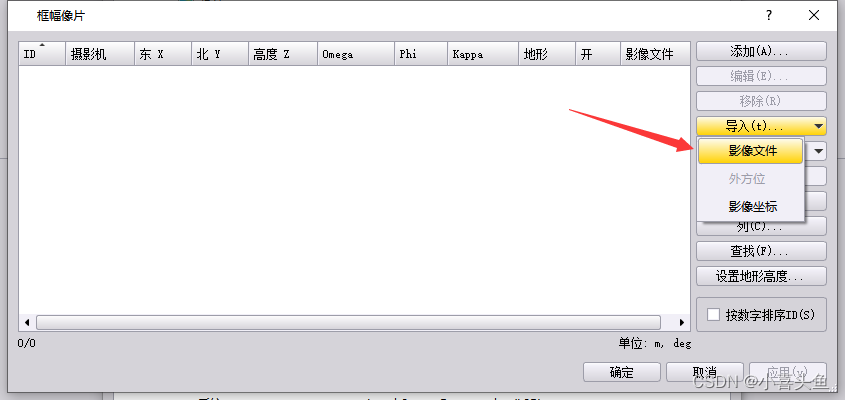
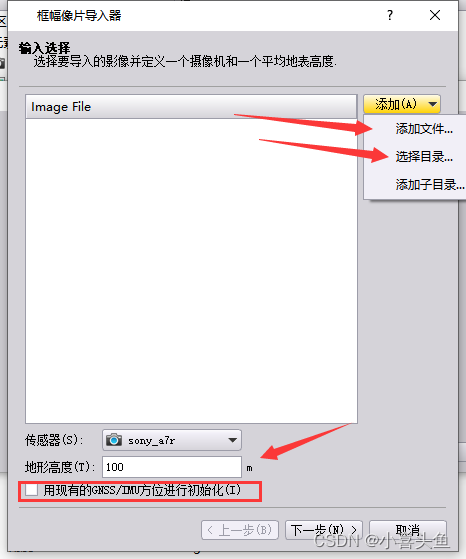
1.可以选择按文件导入也可以选择按目录进行导入
2.需要设置地形高度:可以通过像控点求解测区的平均地形高作为地形高度。
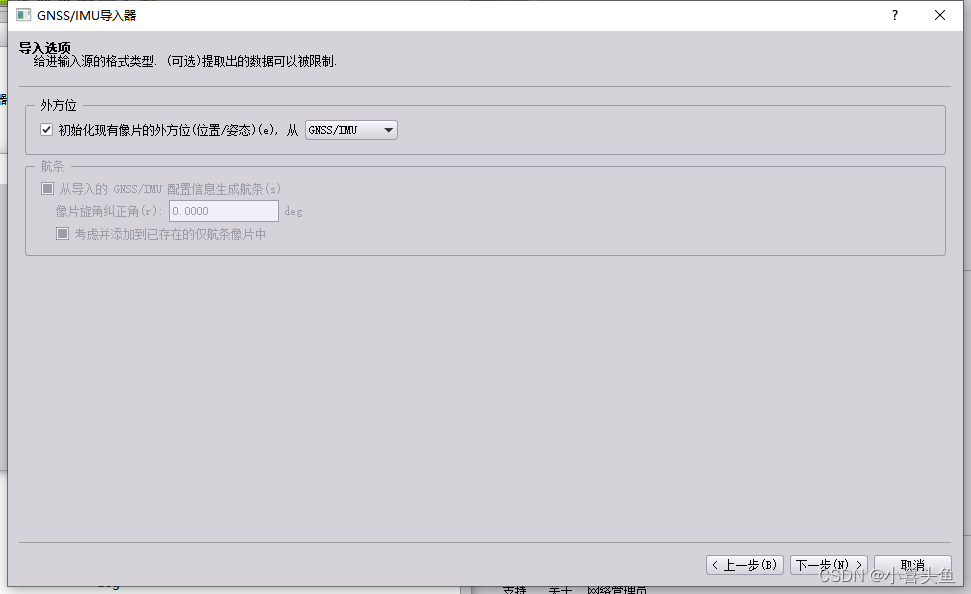
3.不勾选“用现有的GNSS/IMU方位进行初始化”,因为pos数据还没有导入到软件当中。
其他按照默认设置,
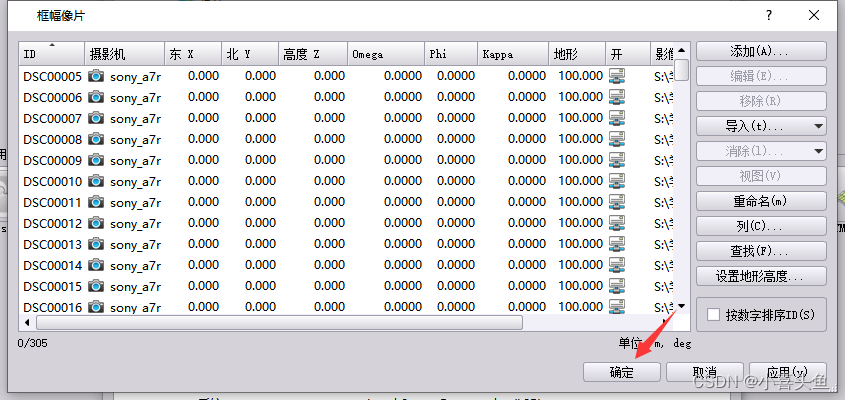
单击 确定 完成影像导入。
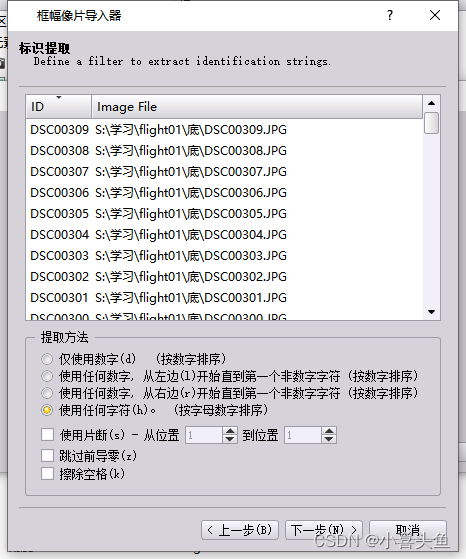
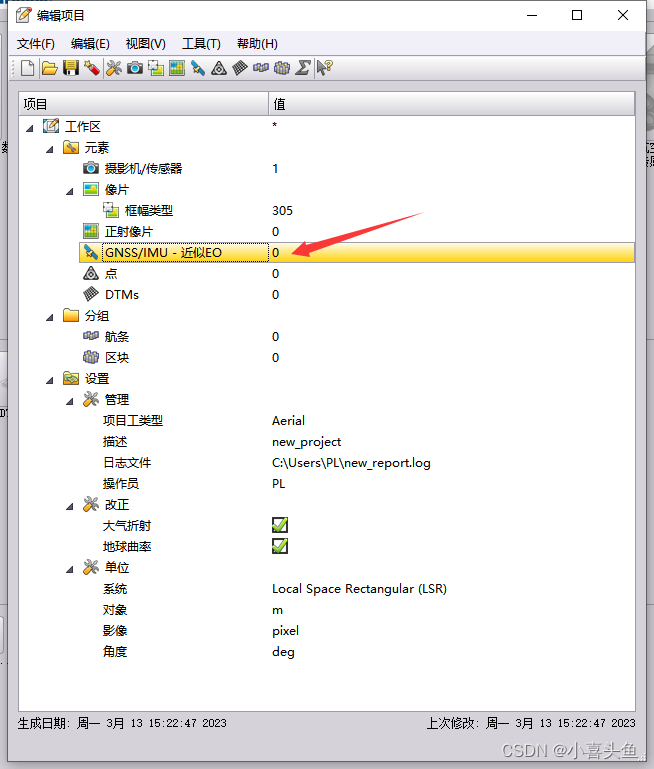
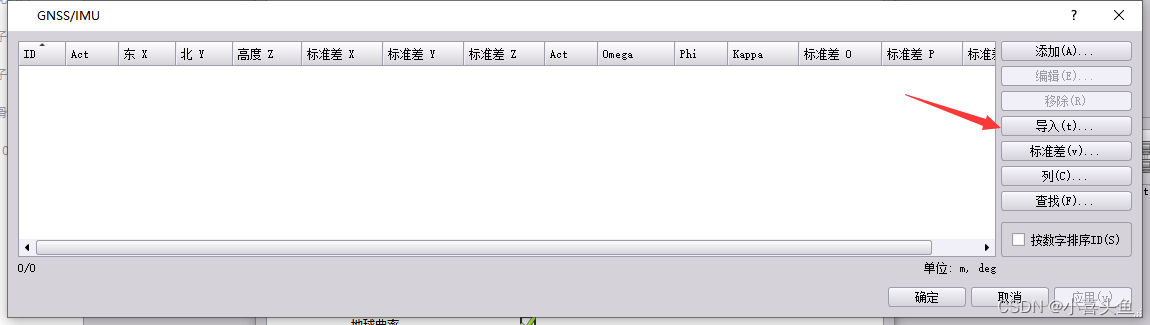
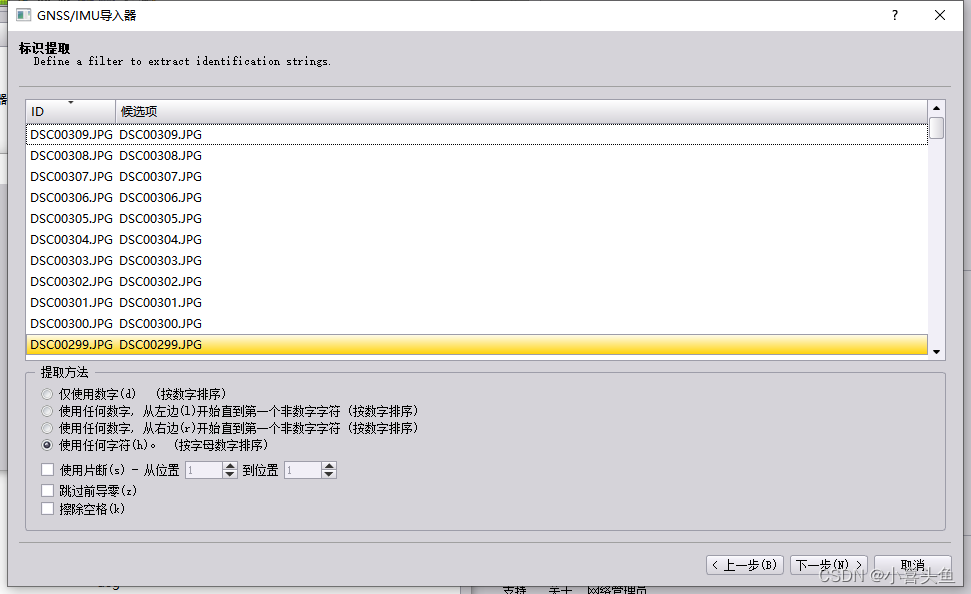
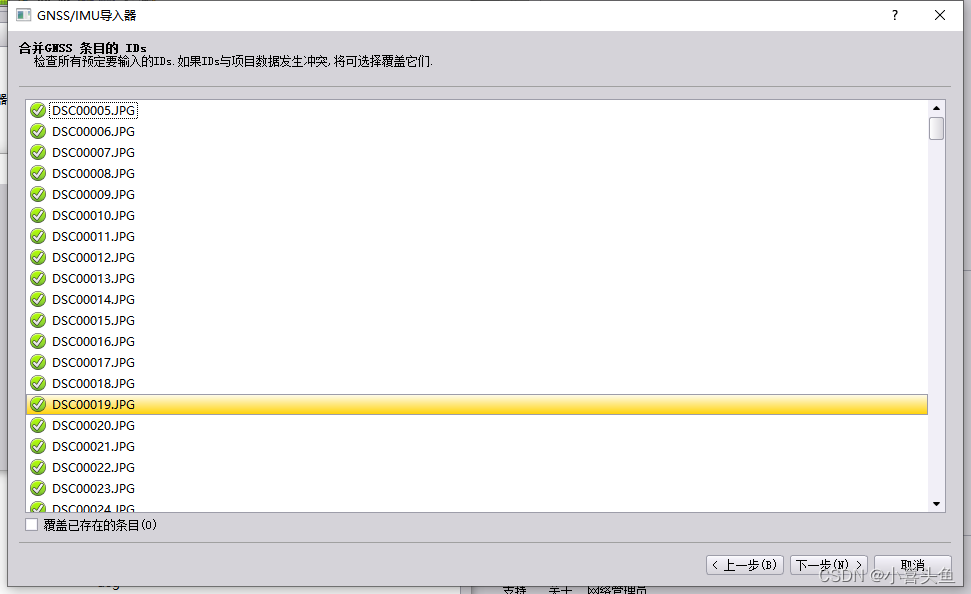
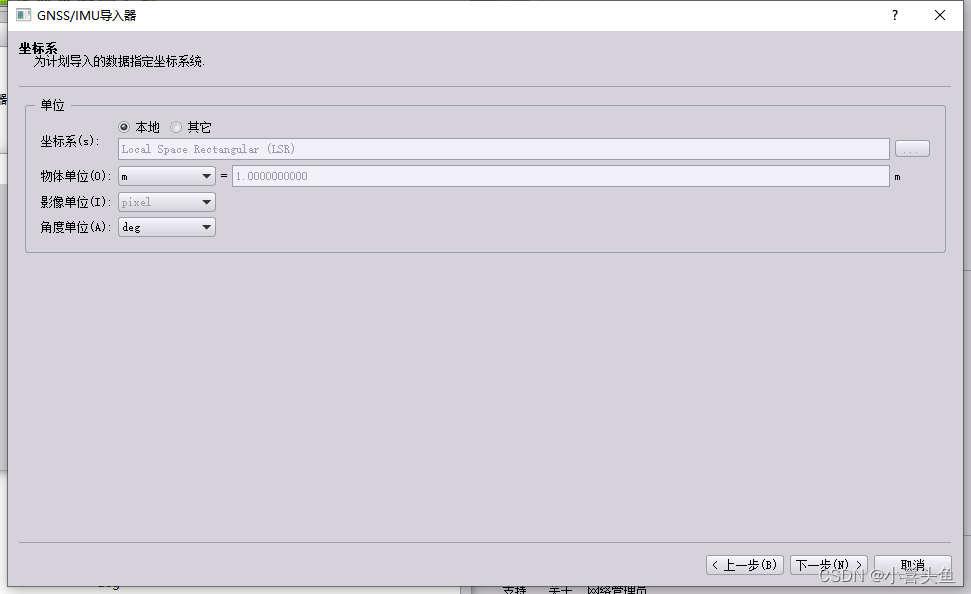
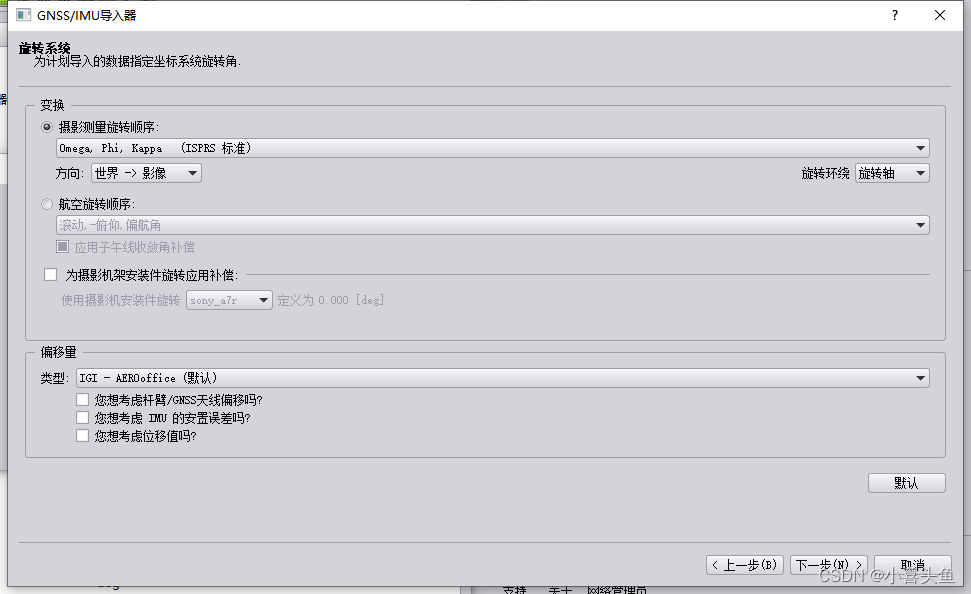
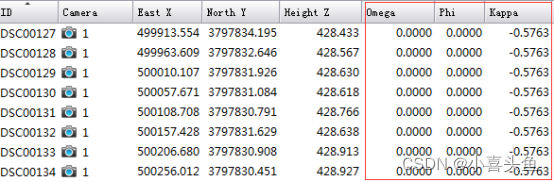
五、导入POS
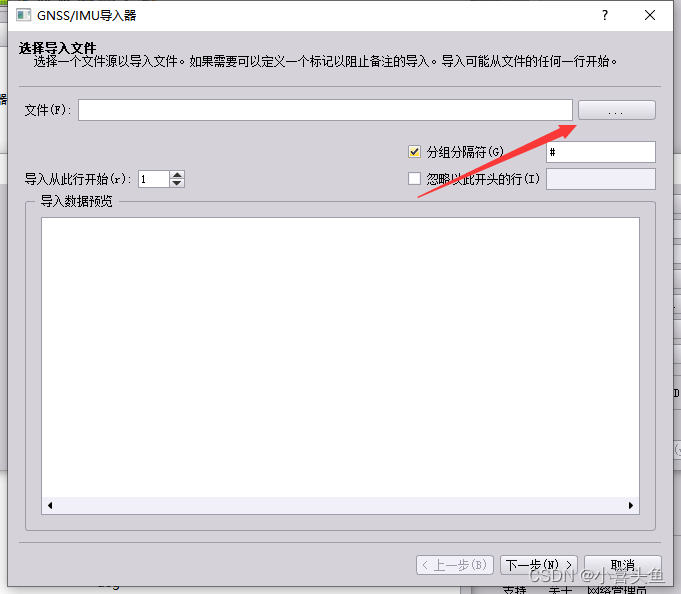
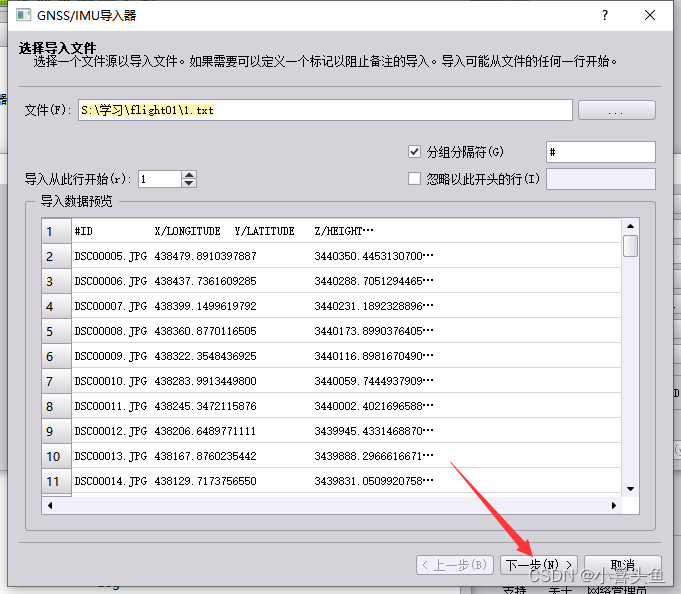
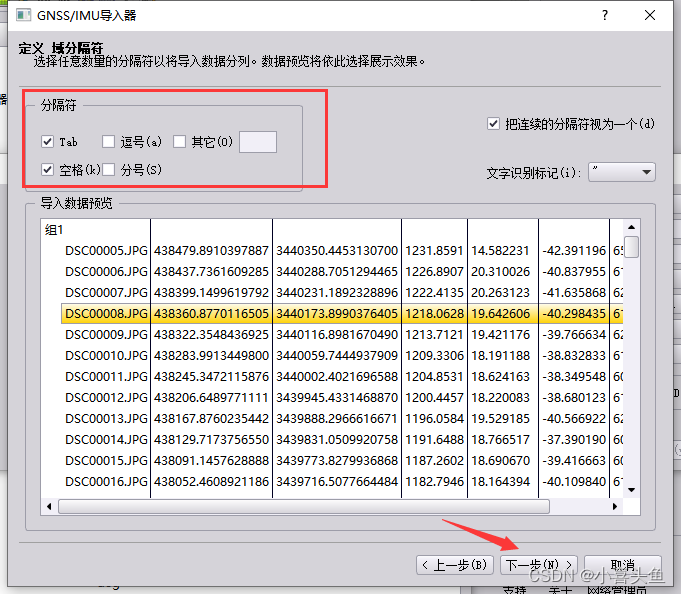
选择正确的分割符,单击下一步
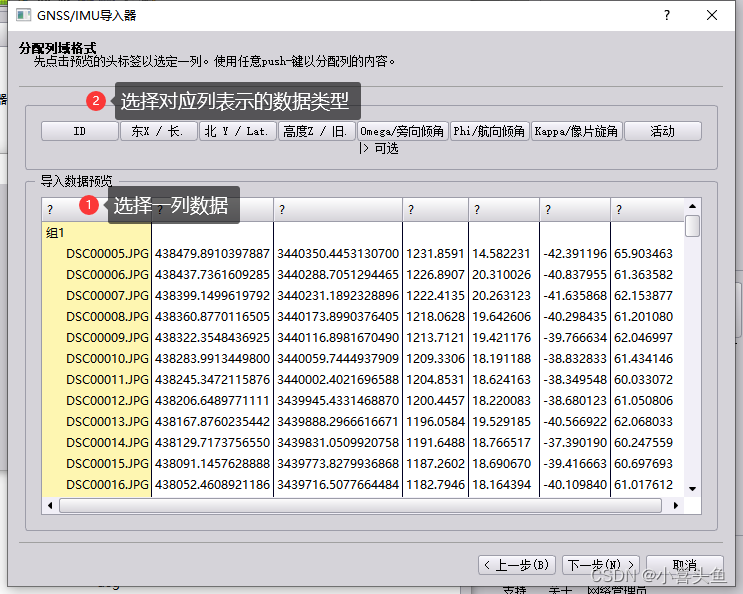
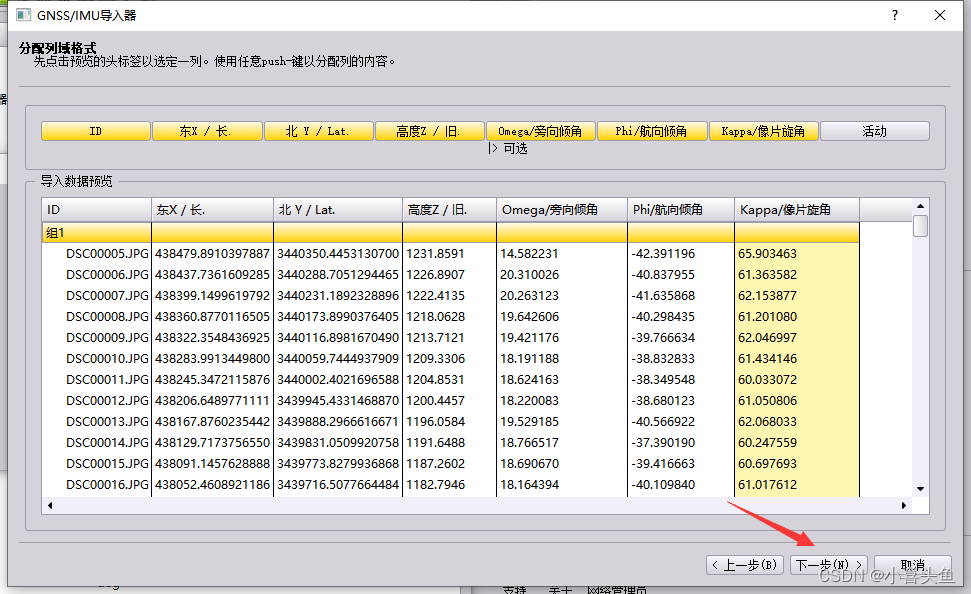
依次完成每列数据的定义。单击下一步
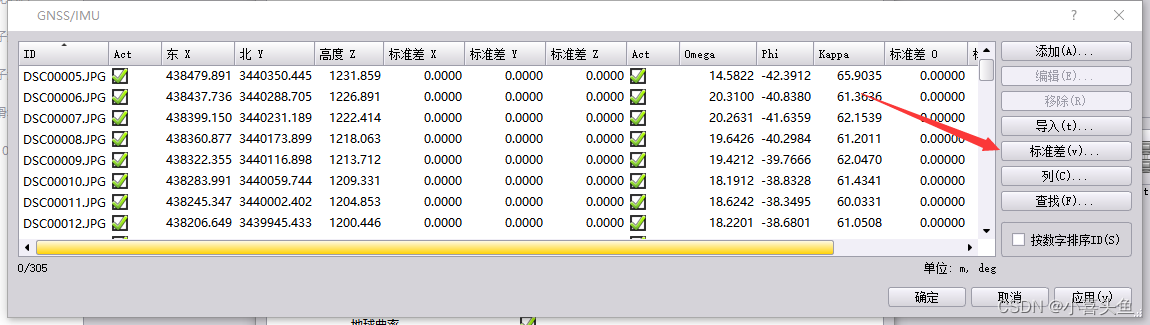
单击标准差,完成GNSS\IMU标准差的设置
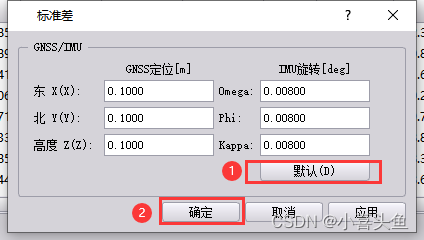
可以根据数据的GNSS和IMU精度进行填写,不确定的按照默认参数进行设置。
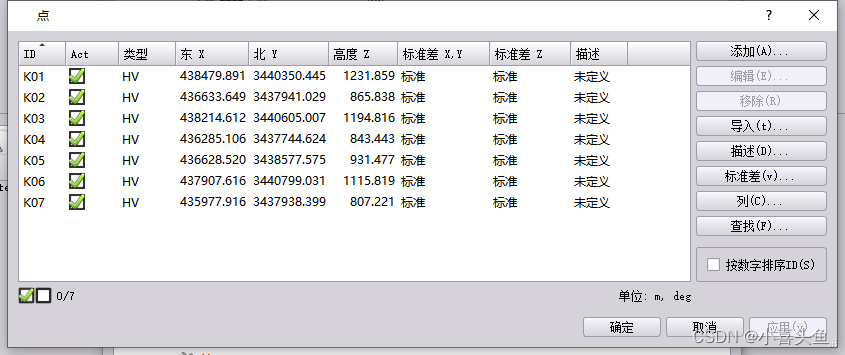
六、导入控制点
控制点导入和标准差的定义可以参照POS导入步骤进行。
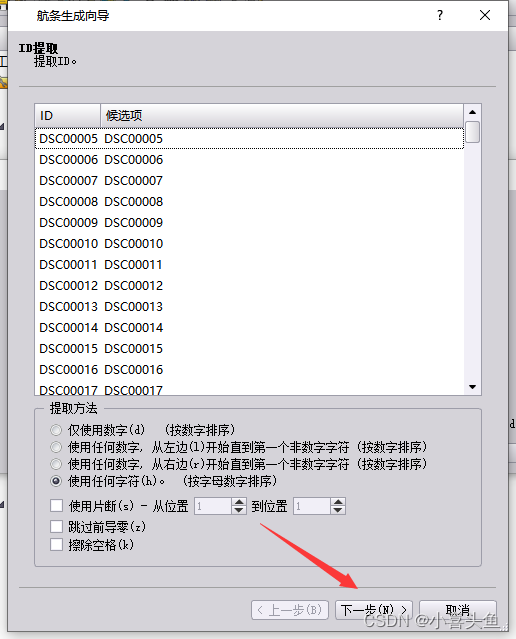
七、生成航带
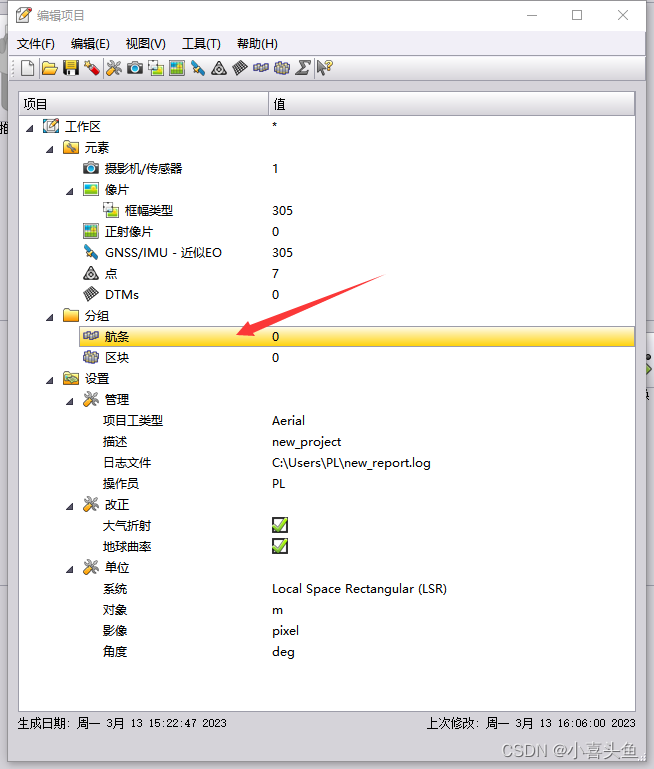
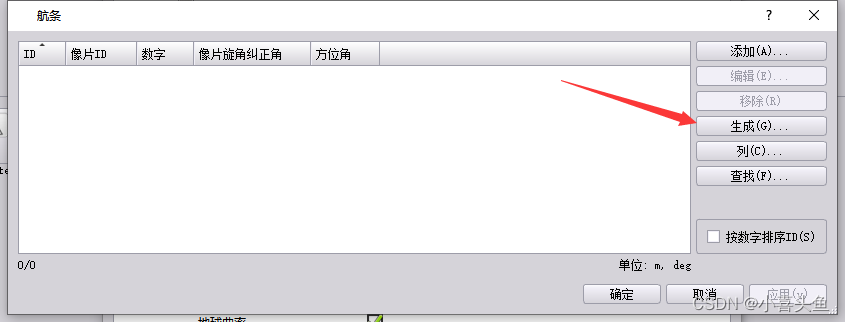
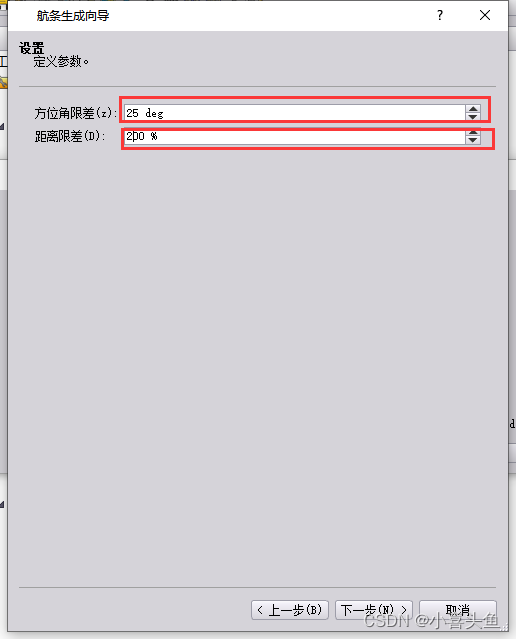
对于无人机获取的影像,方位角限差和距离限差可以适当填写大一些。
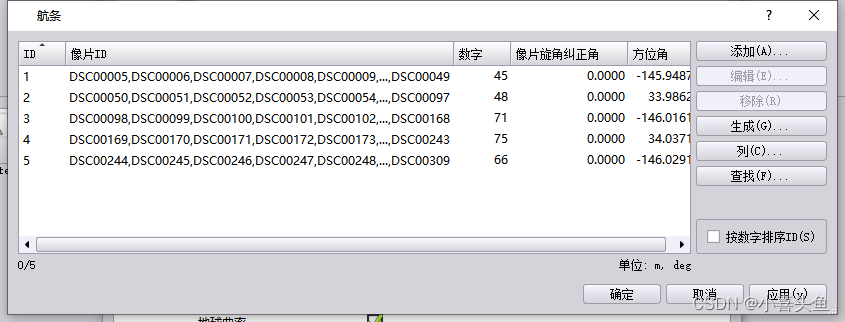
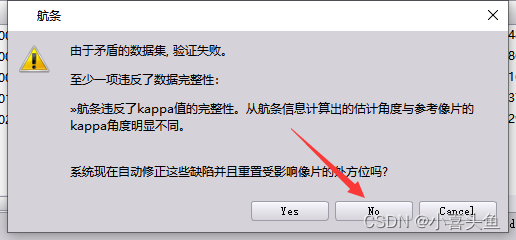
①点击Yes,同一航带同一赋值kappa角平均值,omega、phi值为0;
②点击No,保留原始pos角元素信息不变.一般不建议选择重置像片外方位。
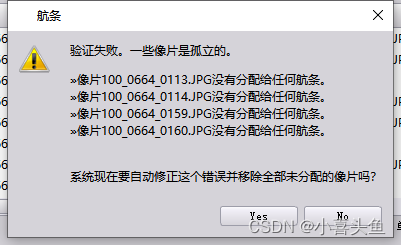
部分照片没有分配给任何航带的警告,
①点击Yes,移除全部未分配的像片
②点击No,保留全部未分配的像片
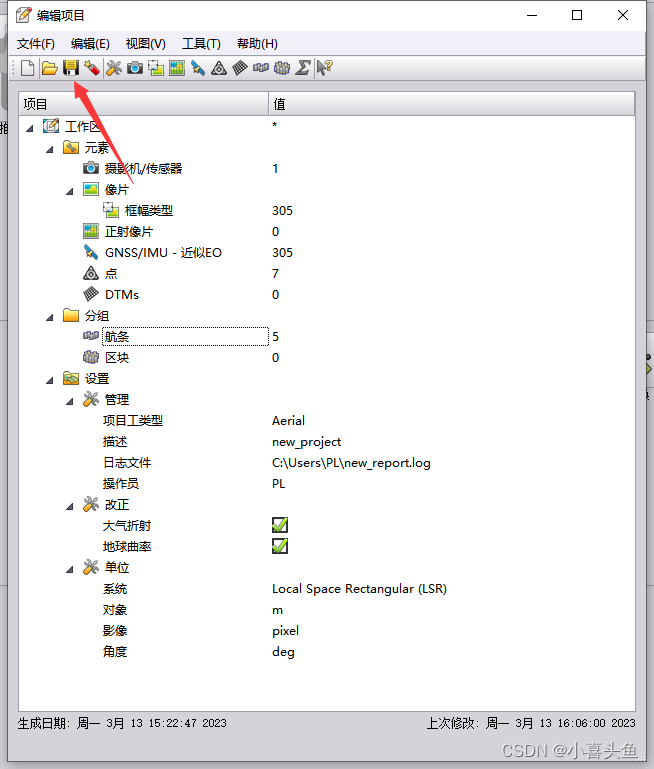
八、保存项目
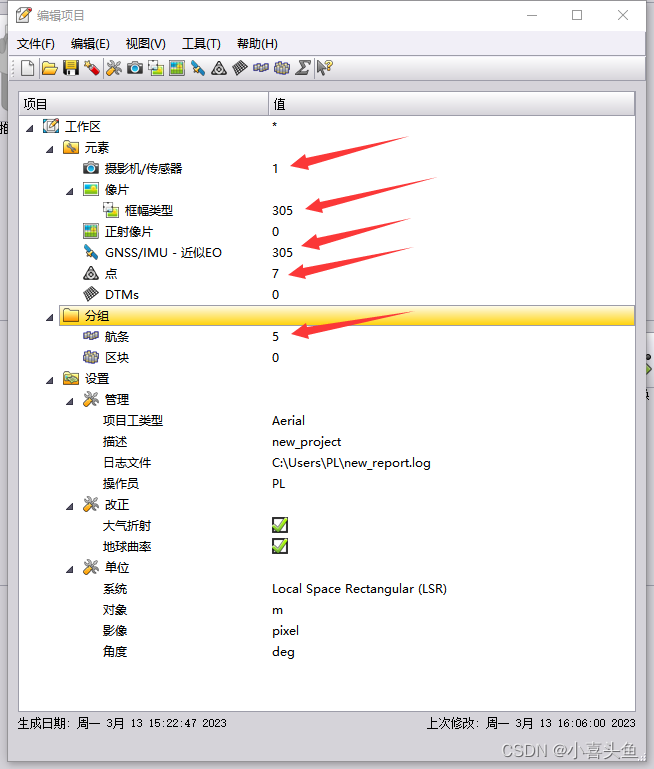
通过以上步骤,完成相机的创建,像片、pos、控制点的导入以及航带的创建。
①点击Yes,可以查看错误和警告
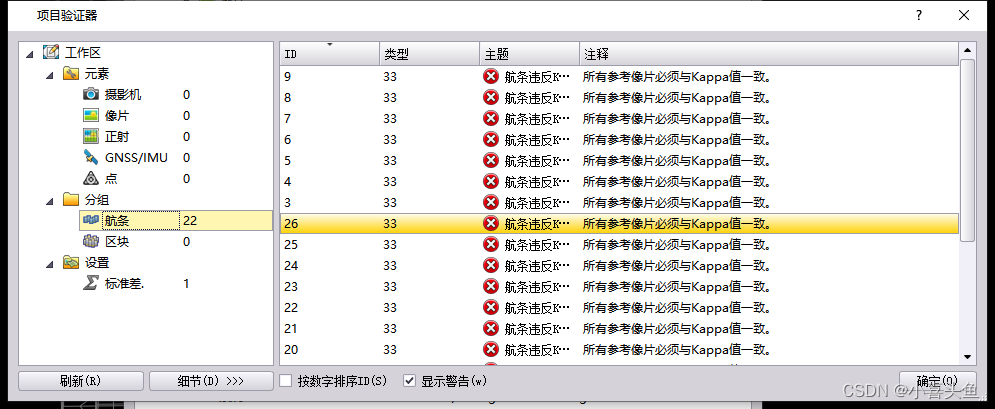
因为kappa角冲突提示错误,只要在Multi photo measurement(PMT)中显示影像时,航带内影像左右像对关系、航带间影像上下像对关系正确即可。
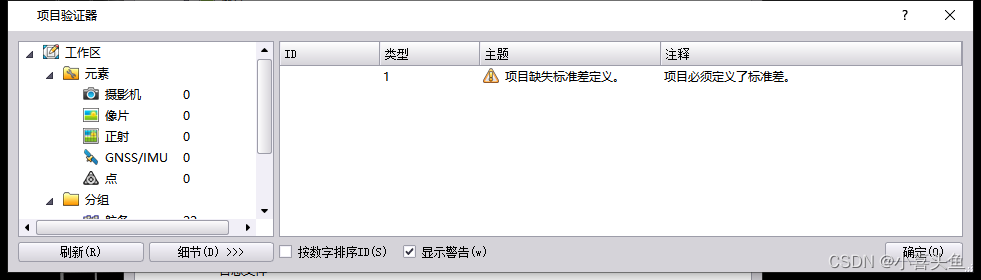
标准差未定意的提醒,可以进行相应的标准差定义,解除该提醒。
②点击No,忽略错误和提醒
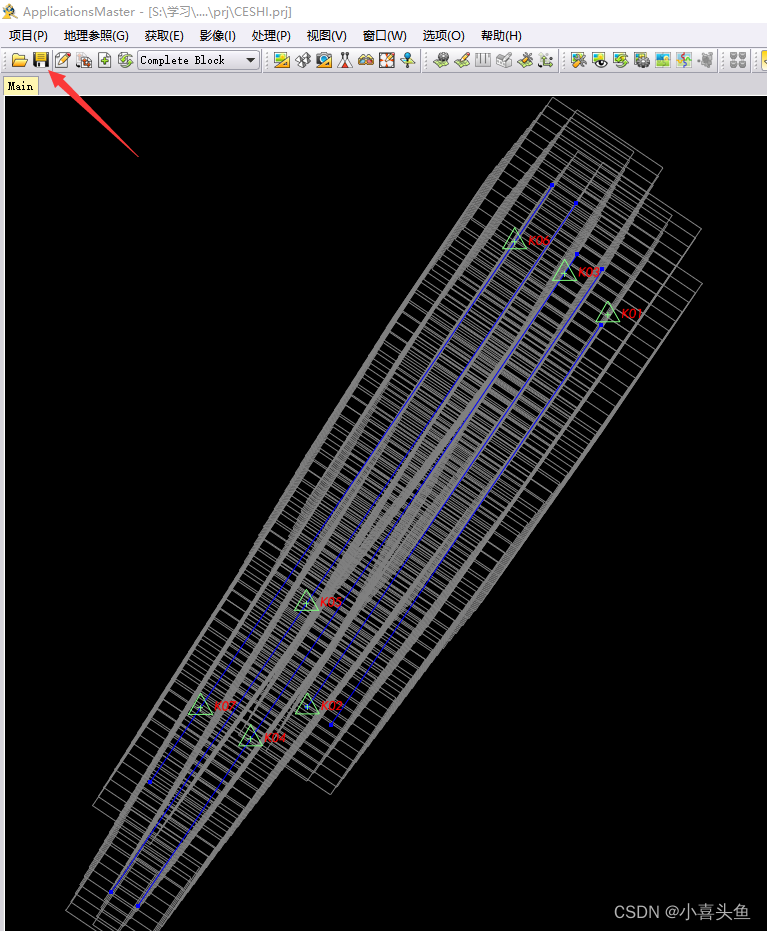
单击保存按钮或者文件–保存,进行项目文件的保存。
















 143
143











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









