







// 采用邻接矩阵表示图
// 简单起见,邻接矩阵(图中各结点间的距离权值)在main函数中直接输入了#include <stdio.h>
#include <stdlib.h>
#define MAXVEX 9
#define INFINITY 65535
typedef int Patharc[MAXVEX]; //存放最短路径上的结点编号
typedef int ShortPathTable[MAXVEX]; //各节点到源点的路径(经过中间结点)长度
struct MGraph{
int numVertexes;
int *vex;
int arc[MAXVEX][MAXVEX];
};
void ShortestPath_Dijkstra(MGraph *G,int v0,int vv,Patharc *P,ShortPathTable *D)
{
int v,w,k,min;
int result[MAXVEX];
int n=0;
for(v=0;v<G->numVertexes;++v)
{
result[v]=0;
(*D)[v]=G->arc[v0][v]; //初始化,其余各节点到源点的距离
(*P)[v]=-1;
}
(*D)[v0]=0;
result[v0]=1; //源点加入
(*P)[n++]=v0;
for(v=0;v<G->numVertexes;++v)
{
min=INFINITY;
for(w=0;w<G->numVertexes;++w) //寻找未加入的所有结点中到源点距离最短的结点k
{
if(!result[w] && (*D)[w]<min)
{
k=w;
min=(*D)[w];
}
}
result[k]=1; //结点k加入
(*P)[n++]=k;
//判断是否到达终点
if(k==vv)
break;
for(w=0;w<G->numVertexes;++w) //更新其余各节点到源点的距离的距离数组
{
//if(!result[w] && (min+G->arc[k][w]<(*D)[w])) //新节点w到源点的距离=k到源点的距离+k到w的距离
if(!result[w])
{
(*D)[w]=min+G->arc[k][w];
//(*P)[w]=k;
}
}
}
//输出结果
printf("\n");
for(v=0;v<G->numVertexes;++v)
{
printf("%d-->",(*P)[v]);
}
}
void main()
{
MGraph *my_g=(struct MGraph*)malloc(sizeof(struct MGraph));
int i,j;
int t=0;
int v0=0;
int vv=8;
my_g->numVertexes=9;
my_g->vex=(int*)malloc(sizeof(char)*my_g->numVertexes);
if(!my_g->vex) return;
for(i=0;i<my_g->numVertexes;++i) //一维数组(图中各结点)初始化{0,1,2,3,4,5,6,7,8}
my_g->vex[i]=i++;
for(i=0;i<my_g->numVertexes;++i)
for(j=0;j<my_g->numVertexes;++j)
my_g->arc[i][j]=INFINITY;
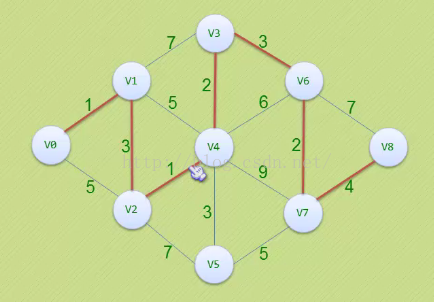
// 无向图的权值二维数组为对称矩阵
my_g->arc[0][1]=1; my_g->arc[0][2]=5;
my_g->arc[1][2]=3; my_g->arc[1][3]=7; my_g->arc[1][4]=5;
my_g->arc[2][4]=1; my_g->arc[2][5]=7;
my_g->arc[3][4]=2; my_g->arc[3][6]=3;
my_g->arc[4][5]=3; my_g->arc[4][6]=6; my_g->arc[4][7]=9;
my_g->arc[5][7]=5;
my_g->arc[6][7]=2; my_g->arc[6][8]=7;
my_g->arc[7][8]=4;
for(i=0;i<my_g->numVertexes;++i)
for(j=0;j<=i;++j)
{
if(i==j)
{
my_g->arc[i][j]=0;
continue;
}
my_g->arc[i][j]=my_g->arc[j][i];
}
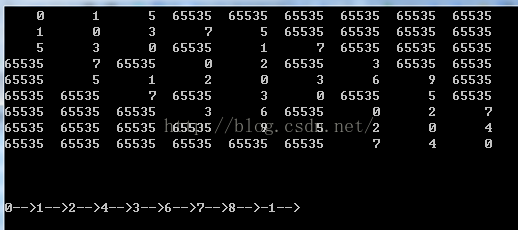
for(i=0;i<my_g->numVertexes;++i) //二维数组表示图中各结点间连接边的weight
{
for(j=0;j<my_g->numVertexes;++j)
printf("%5d ",my_g->arc[i][j]);
printf("\n");
}
printf("\n\n");
Patharc P;
ShortPathTable D;
ShortestPath_Dijkstra(my_g,v0,vv,&P,&D);
free(my_g->vex);
//free(my_g->arc);
}
运行结果表明从节点0到结点8的最短路径所经过的结点编号(在本例中输出了初始化时的-1,可优化不输出-1)















 6054
6054











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









