






泊车路径跟踪
平行泊车 垂直泊车 纯跟踪算法 模型预测算法 MPC pursuit carsim 联合仿真 跟踪控制
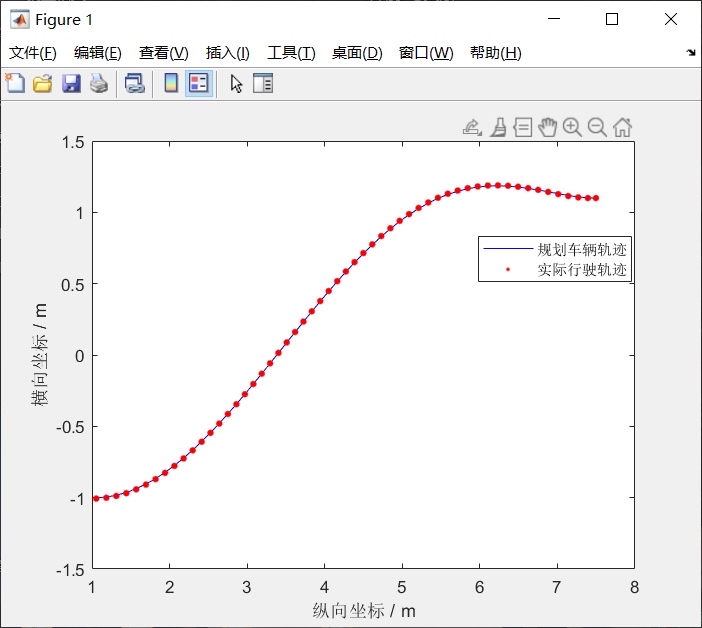
根据已知的平行泊车 垂直泊车离散点信息 利用纯跟踪算法/模型预测算法进行泊车路径的跟踪
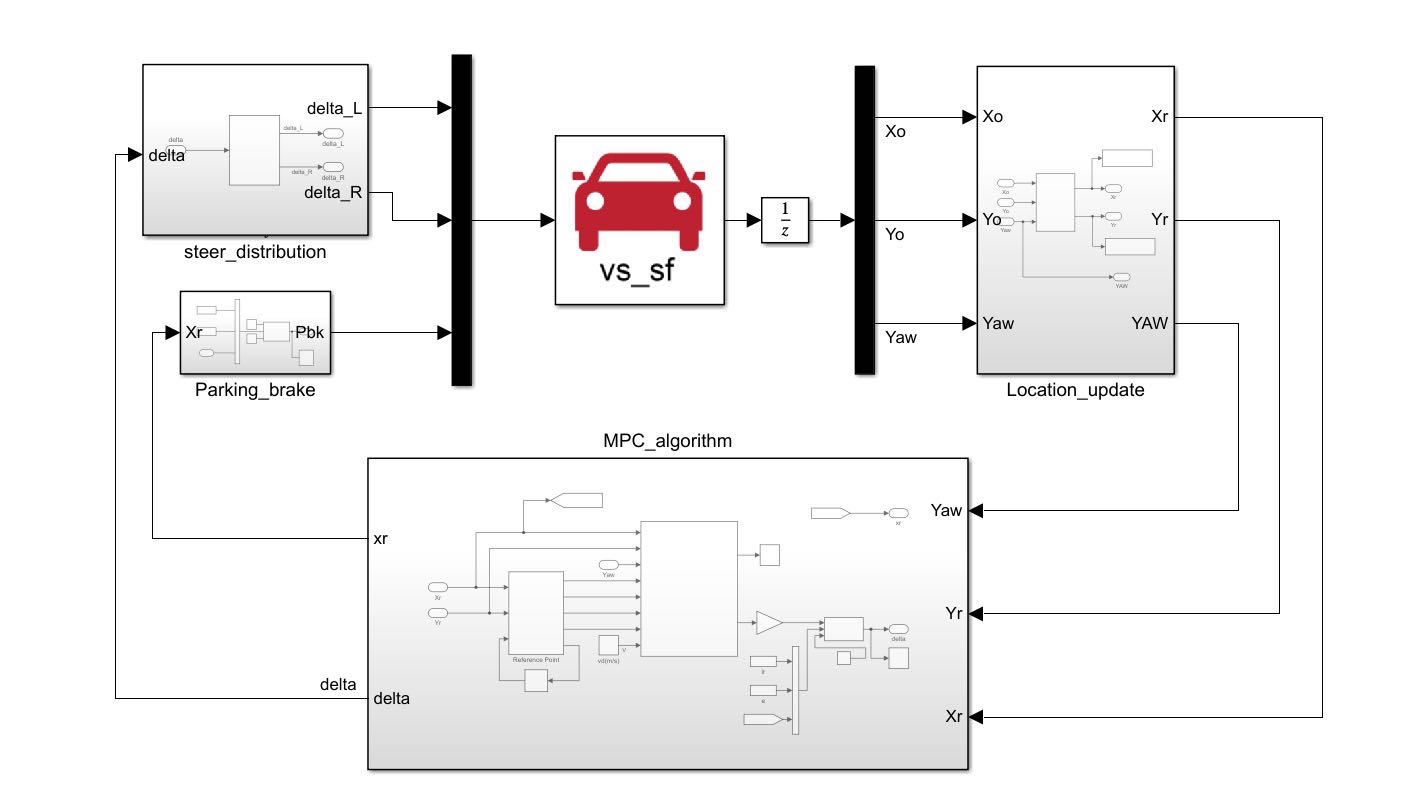
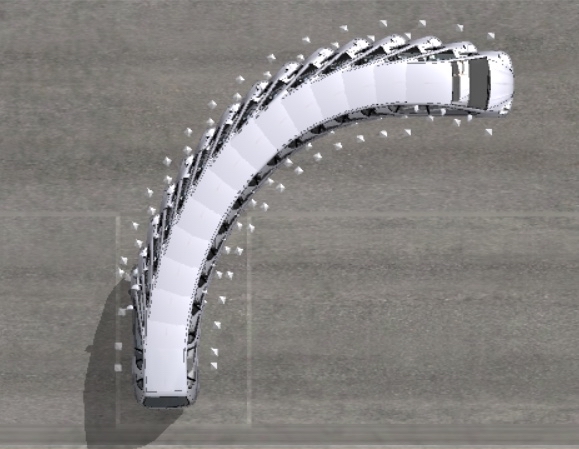
包含matlab单独的跟踪仿真 和 simulink-carsim联合仿真(可根据自身需求更换路径信息)
所有资料均包括:
1、相关问题的文档分析
2、matlab 代码及相关注释
3、simulink为2020B以上、carsim为2019
4、carsim包含泊车环境设置
相关资料
ID:729647980540308
小呆的鹅
泊车路径跟踪是一项重要的技术,它可以帮助驾驶员在平行泊车和垂直泊车时更加准确地跟踪路径。本文将介绍一种基于纯跟踪算法和模型预测算法的泊车路径跟踪方法,并提供了相关的代码和仿真环境设置。
在泊车路径跟踪的研究中,我们首先需要获取已知的平行泊车和垂直泊车的离散点信息。这些信息可以通过车载传感器、摄像头或者其他设备来获取。然后,我们会运用纯跟踪算法和模型预测算法来进行泊车路径的跟踪。
纯跟踪算法是一种常用的路径跟踪方法,它基于车辆的运动学模型进行控制。该算法通过调整车辆的转向角度和速度,使得车辆能够按照预定的路径行驶。在泊车路径跟踪中,纯跟踪算法可以根据已知的离散点信息,计算出车辆跟踪路径所需的转向角度和速度。
模型预测算法是一种基于数学模型的路径跟踪方法,它可以预测未来一段时间内车辆的运动轨迹。该算法可以根据车辆的运动学模型和环境的约束条件,预测出车辆在不同时间段内的位置和速度。在泊车路径跟踪中,模型预测算法可以根据
相关的代码,程序地址如下:http://coupd.cn/647980540308.html
















 938
938











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









