






随着软件的Web化越来越流行,我也开始尝试将Web技术应用到设备参数配置中。之前,我曾使用Vue设计Web页面,并将其发布到嵌入式的Linux系统上,结合web服务器运行,实现了类似路由器配置界面的功能。这种基于Web的方式方便直观,大大提高了设备配置的效率。未来一段时间,我将主要从事雷达相关工作,于是我开始思考,是否也可以通过Web技术来实现雷达回波的可视化?基于这一想法,我利用一些碎片时间着手开发该项目,最终完成了基于OpenLayers的雷达回波显示功能。
实现原理
项目采用B/S架构设计,其中前端采用Vue+openlayers,后端采用python编写。
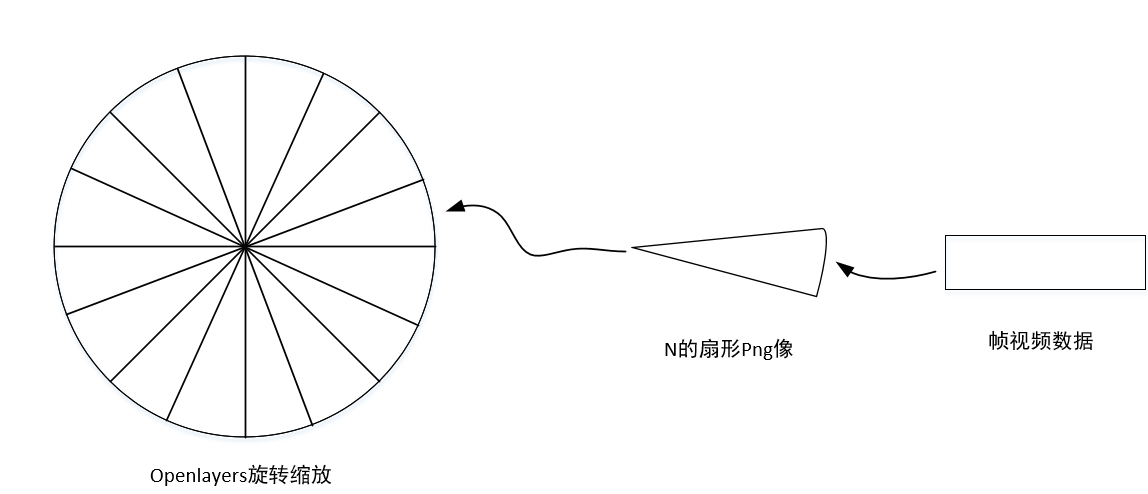
上图描述了雷达视频数据从获取到最终在OpenLayers上显示的整个流程:
- CAT240雷达视频数据:接收雷达的原始数据,默认采用2048个方位线,spoke长度 [1024, 2048, 4096, 8192]可选。
- 数据解析/帧存储:对雷达数据进行解析,将解析的数据抽取到1024个点,存储一圈的数据至[2048,1024]的二维数组中。
- 扇区图像映射:将一圈分成16份,每一份通过极坐标转换形成扇形图,雷达回波映射为PNG图片的alpha通道。
- WebSocket发送:扇形图像转为blob对象通过WebSocket实时传输至web前端。
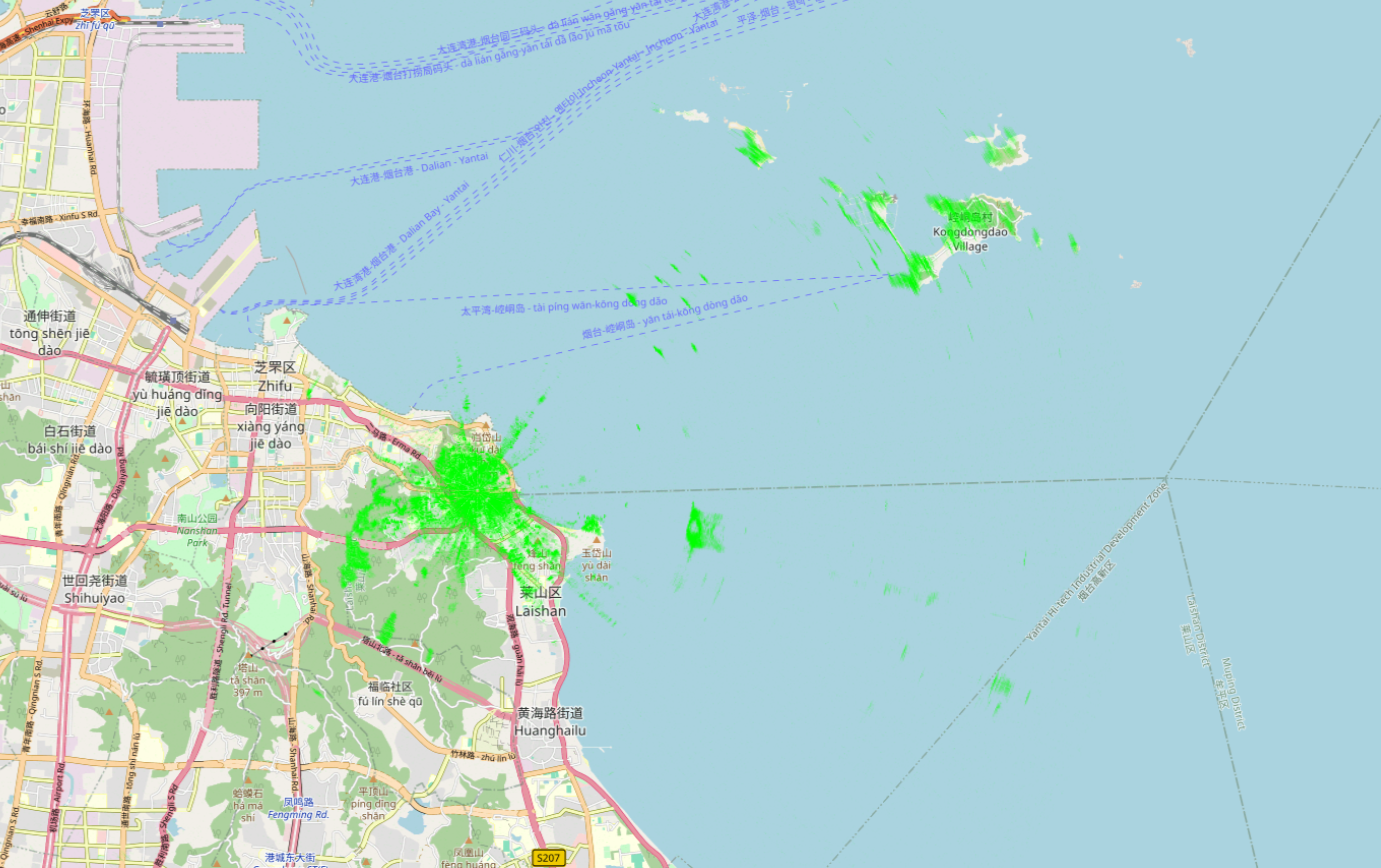
- OpenLayers贴图显示:前端Js代码接收后将blob转为png图像,根据编号、量程获取贴图的坐标,最终在OpenLayers地图上进行可视化显示。
扇区图像映射
最终,该功能是在ARM端实现的,由于资源有限,算法需要尽可能简单化。为此,我设计了一张映射表,用于将帧视频数据从极坐标转换到平面坐标。
具体实现上,我将完整的雷达图像划分为16个扇区,并为它们编号为0至15。假设雷达数据有2048根方位线,则每个扇区包含2048/16根方位线。通过三角函数进行极坐标转换,将每个视频数据点映射为极坐标形式的(r, a),其中r为距离,a为角度。接下来,我判断该(r, a)坐标是否落在当前的扇区范围内。如果该坐标在扇区范围内,则将其记录在映射表(map_table)中;否则,在map_table中对应的位置填零。在后续处理过程中,扇区内的帧视频数据将通过映射表查找对应的平面坐标,然后将视频值赋给扇区形矩阵中的相应位置。这个矩阵将作为一张绿色PNG图片的alpha通道,用来展示雷达回波效果。通过这种方式,雷达回波可以以图像形式直观地显示在Web页面上。
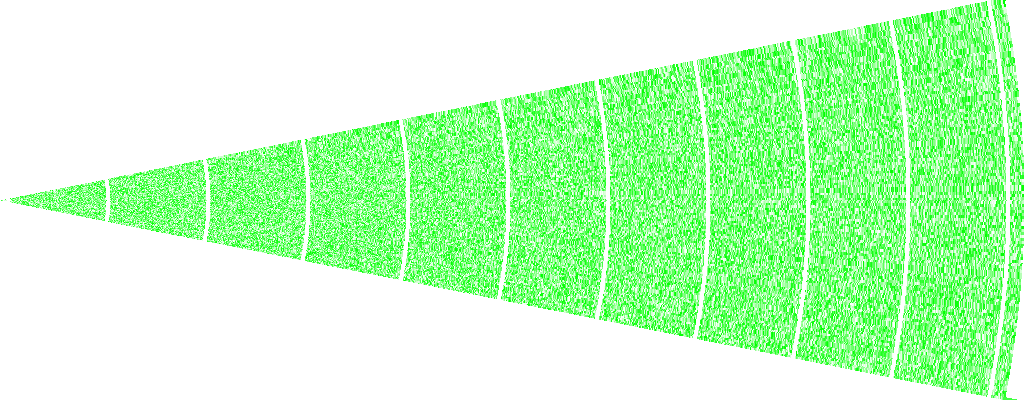
上图为测试扇区图像映射功能生成的png
Openlayers的贴图显示
在Web前端中,需要将16个扇形图像根据编号依次排列,并经过旋转和坐标变换后贴到地图上。在实现过程中,我遇到了两个主要问题:坐标系转换和图片的旋转。
- 坐标系问题:
OpenLayers使用的坐标系是EPSG:3857(墨卡托投影坐标系),该坐标系的优势在于坐标与像素之间的转换关系非常简单。通过这种简单的映射,可以对扇区图像进行旋转和缩放,然后将其精确地映射到地图上。 - 图片旋转问题:
OpenLayers默认情况下并不支持对图片进行旋转功能。在解决这一问题时,我在GitHub上找到了相关的解决方案,通过自定义的代码对扇区图像进行旋转,使得图片能够正确地与地图对齐。
遗留问题
在不同量程下,雷达回波图像的接缝处出现了对不齐的现象。我怀疑问题出在坐标转换上,特别是在贴图时需要将极坐标转换为经纬度坐标。转换过程中使用的Vincenty算法可能存在一定的误差,或者是由于从三维空间到二维平面的转换本身存在偏差,这些都需要进一步修正。
目前,为了解决这个问题,我采取的方法是在不同量程下对扇区的角度进行修正,从而调整图像的对齐情况。尽管这一方法能暂时缓解问题,但如果有专业人士能够提供更好的解答,欢迎留言或发邮件至:1174316744@qq.com。
















 543
543

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











