










题目链接
http://www.lydsy.com/JudgeOnline/problem.php?id=2731
思路
裸的三角形求面积并问题,计算几何问题中这类求面积并的问题的通法就是对事件点做扫描线,不过这个题很有意思,因为它给的所有点的坐标都是整数,而且三角形都是等腰直角三角形,这就使得要讨论的情况简化了许多:1、几乎全部是整数运算,不存在精度问题,不像射箭那题丧病地卡精度,非常爽;2、三角形和三角形的交都是等腰直角三角形,做扫描线时,每次求的面积都是一个直角梯形的面积,并且是顶边一定小于底边的三角形,非常好求。
裸做扫描线的做法不难,但是过不了所有数据,但是这种暴力做法还是可以通过优化过掉此题。
首先膜拜下我们湖北第一神犇vfleaking的题解
http://vfleaking.blog.163.com/blog/static/17480763420123301447215/
以下做法就是他的做法,非常简单粗暴。
将所有三角形按照底边的
y
坐标升序排序,然后用一根扫描线,从最下面的三角形的底边开始向上扫,并时刻维护
那么实际上整个题要做的就是从最下面不断地向上移动扫描线,用一个栈维护覆盖在扫描线上面的三角形,每移动一次扫描线,先维护一次有效长度和 sum[] 数组,但是这次维护只是在原有的三角形基础上减少,并不增加三角形(也就是说这次维护是不添加新相交的三角形的,有效长度只会减少,不会增加)!在答案中添加面积后,再对扫描线上的有效长度和 sum[] 数组这两个信息进行第二次维护,这次会加入移动扫描线后新相交的三角形。如此反复便可得到答案。
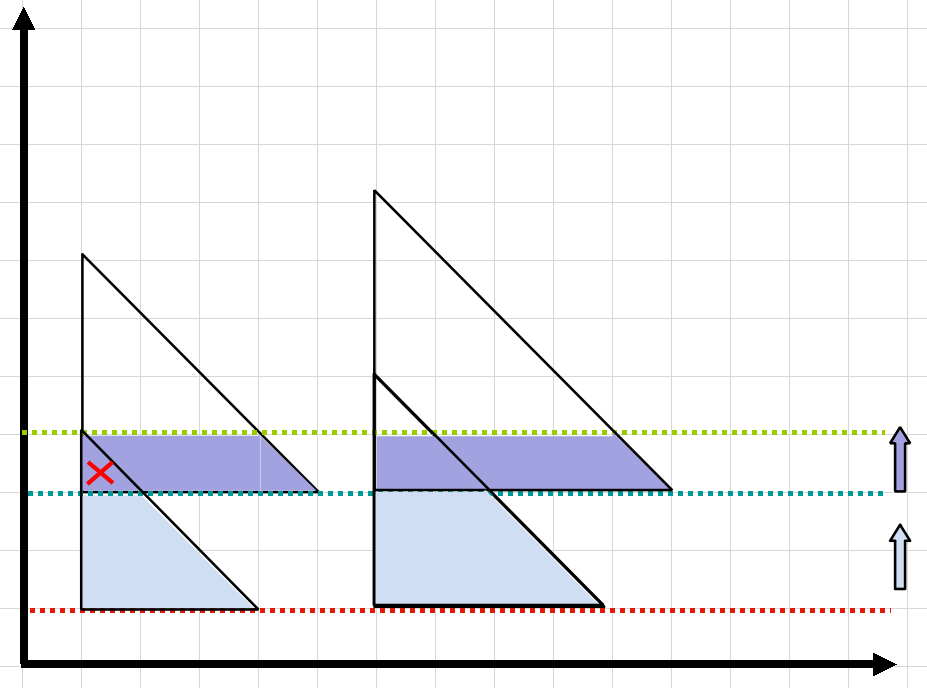
但是这样做还是会TLE掉最后两个点,因此我们需要再想办法优化,可以发现,某些小三角形是被大三角形所包裹起来的(如下图中红叉的那个紫色三角形,虚线是扫描线,箭头是扫描线的移动方向),显然这样的小三角形都可以忽略不计,因此可以大大减少数据规模。
那么我们可以标记每个三角形是否已经被删除了,在每次扫描线移动后,在加入新的三角形的时候,看这个三角形是否包裹了原来的三角形,以及这个三角形是否被原来的三角形所包裹。若这个三角形包裹了原来的三角形,就把原来的那个三角形删掉,如此下去,如果这个三角形并没有被原来扫描线上的三角形包裹,那么就把它加入扫描线上,并更新对应于扫描线上的区间的格子的信息。
要做到轻松地删除三角形,并通过这样的优化减少数据规模的话,就需要用一个双向链表来维护当前所有还没被删掉的三角形,当然也可以用splay来维护的啦,速度会快很多。
另外这个题的坐标范围比较小,因此扫描线暴力地一格一格移动就行了(就是i++这样),没必要搞离散化,写离散化反而会搞复杂,不过如果坐标范围变大的话,就只能写离散化了。
代码
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <algorithm>
#define MAXN 11000
#define MAXL 1100000
using namespace std;
double ans=0; //ans=三角形的面积并
int n; //n个三角形
int lowerBound=MAXL,upperBound=-MAXL; //三角形在y坐标上的覆盖区间为[lowerBound,upperBound]
int next[MAXN],last[MAXN]; //双向链表,删除三角形时用
int head=1; //链表表头指针
bool availble[MAXN]; //true表示该三角形可以用
int sum[MAXL]; //sum[i]=在当前扫描线上,x坐标为i的点被三角形覆盖的次数
int stack[MAXN],top=0; //stack保存每次移动扫描线后被改的三角形
void del(int p) //在双向链表中删除点p
{
if(p==head) head=next[p];
next[last[p]]=next[p];
last[next[p]]=last[p];
availble[p]=false;
}
struct Triangle //三角形
{
int x,y,d; //三个点坐标(x,y),(x,y+d),(x+d,y)
int l,r; //三角形投影在x轴的区间
}triangles[MAXN];
bool cmp(Triangle a,Triangle b)
{
if(a.y==b.y) return a.l<=b.l&&a.r>=b.r;
return a.y<b.y;
}
bool operator>(Triangle a,Triangle b)
{
return a.l<=b.l&&a.r>=b.r;
}
void init()
{
scanf("%d",&n);
for(int i=1;i<=n;i++)
{
scanf("%d%d%d",&triangles[i].x,&triangles[i].y,&triangles[i].d);
triangles[i].l=triangles[i].x;
triangles[i].r=triangles[i].x+triangles[i].d;
availble[i]=true;
last[i]=i-1;
next[i]=i+1;
lowerBound=min(lowerBound,triangles[i].y);
upperBound=max(upperBound,triangles[i].y+triangles[i].d);
}
sort(triangles+1,triangles+n+1,cmp);
}
void work() //求三角形面积并
{
int len=0; //len=在当前扫描线上被三角形覆盖的长度
for(int i=1;i<=n&&triangles[i].y==lowerBound;i++) //枚举三角形i
for(int j=triangles[i].x;j<triangles[i].r;j++) //枚举扫描线上的坐标j
{
if(!sum[j]) len++;
sum[j]++;
}
for(int i=lowerBound+1;i<=upperBound;i++)
{
int lastlen=len;
top=0;
for(int j=head;triangles[j].y<i&&j<=n;j=next[j]) //在链表中找那些被扫描线穿过的三角形j
{
Triangle &now=triangles[j];
now.r--; //扫描线向上移了一个单位,对应的,这个三角形的投影区间变成了[L,R-1]
if(now.r==now.x-1) //这个三角形扫完了
del(j); //将它从链表中删去
else
{
if(sum[now.r]==1) len--; //只有一个三角形覆盖了扫描线上now.r的点,这个点不能计入有效长度,那么当前扫描线上的有效长度-1
sum[now.r]--;
stack[++top]=j;
}
}
ans=ans+(double)(lastlen+len)/2; //用以lastlen为底边,len为顶边、高为1的梯形更新面积并
//然后更新,把那些被其他大三角形包裹住的小三角形删掉
for(int j=head;triangles[j].y<=i&&j<=n;j=next[j]) //更新扫描线上每个点被三角形覆盖的次数
{
int k;
if(triangles[j].y==i)
{
for(k=1;k<=top;k++)
{
if(availble[stack[k]]==false) continue;
if(triangles[stack[k]]>triangles[j])
{
del(j);
break;
}
if(triangles[j]>triangles[stack[k]])
{
del(stack[k]); //删了栈中的三角形的话,扫描线上每个点被覆盖次数以及扫描线的有效长度必须更新
for(int t=triangles[stack[k]].l;t<triangles[stack[k]].r;t++)
{
if(sum[t]==1) len--;
sum[t]--;
}
}
}
if(k>top) //新加入的三角形j没有被原来扫描线上覆盖的三角形所删除,那么它就有可能删除了原来覆盖的三角形,将它对应在扫描线上的区间上的格子都更新一遍
{
for(int t=triangles[j].l;t<triangles[j].r;t++)
{
if(sum[t]==0) len++;
sum[t]++;
}
}
}
}
}
}
int main()
{
init();
work();
printf("%.1lf\n",ans);
return 0;
}















 9322
9322











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









