










题目链接
http://www.lydsy.com/JudgeOnline/problem.php?id=2433
思路
一个很显然的
O(n3)
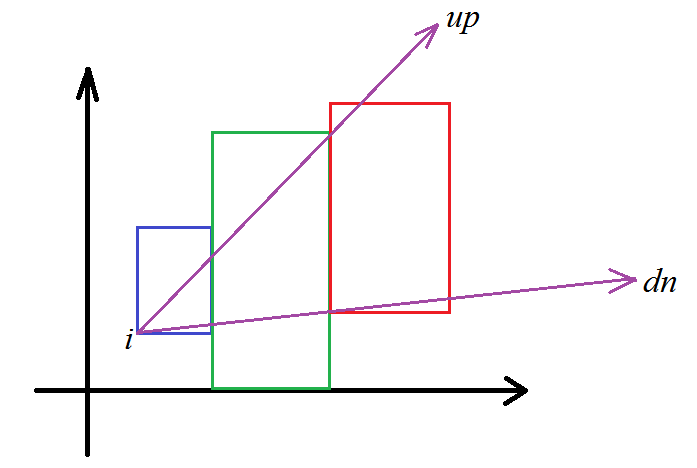
做法:每个矩形上有四个顶点,首先暴力枚举定点对
(i,j)
,再枚举其他的点,叉积判断是否有矩形与矩形的连接处卡住了直线
ij
,若没有被卡,那么在图中连
i
到
这个方法非常丽洁,可惜过不了这道题。上面的做法中判断直线
i,j
是否被卡,很多时候是在做重复劳动,更好的做法是用DP,用
f[i]
表示从起点
S
到点
f[i]=min直线ij是合法的{f[j]+dist(j,i)}
显然是从最左边的矩形DP到最右边的矩形。我们枚举矩形 t 里的点
当用矩形 t 里的点
但是要加上一个特判,如下面的情况
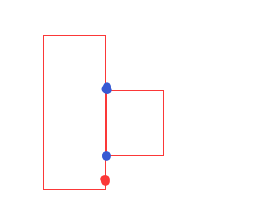
用红色的点去更新蓝色的点的DP值,然后直接退出。因为对于红色的点右边矩形中的所有点(蓝色点除外),与红色点的连线都是不合法的,因此后面就没有必要更新了,可以直接退出。
代码
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <algorithm>
#include <cmath>
#define MAXE 10000
#define MAXV 51000
using namespace std;
int n;
double f[MAXV];
struct Point
{
int x,y;
Point(){}
Point(int _x,int _y):x(_x),y(_y){}
}points[MAXV],S,T;
Point operator-(Point a,Point b)
{
return Point(a.x-b.x,a.y-b.y);
}
int cross(Point a,Point b)
{
return a.x*b.y-a.y*b.x;
}
double dist(Point a,Point b)
{
return sqrt((double)((a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y)));
}
bool inRange(Point a,Point up,Point dn,Point d) //判断d是否在a->b,a->c围成的夹角里
{
if(cross(up-a,d-a)>0||cross(dn-a,d-a)<0) return false;
return true;
}
struct Square
{
Point zx,zs,yx,ys;
Square(){}
Square(Point zx,Point zs,Point yx,Point ys):zx(zx),zs(zs),yx(yx),ys(ys){}
}sqr[MAXV];
bool inSquare(Square a,Point b) //判断点b是否在矩形a内
{
return b.x>=a.zx.x&&b.y>=a.zx.y&&b.x<=a.ys.x&&b.y<=a.ys.y;
}
double ans=1e20;
void update(Point p,int pos,double val) //用矩形pos的点p的f值val去更新这个矩形后面的矩形的每个点的f值
{
Point up=Point(p.x,p.y+1);
Point dn=Point(p.x,p.y-1);
for(int i=pos;i<=n;i++)
{
if(inRange(p,up,dn,sqr[i].zx))
f[i*4]=min(f[i*4],val+dist(p,sqr[i].zx));
if(inRange(p,up,dn,sqr[i].zs))
f[i*4+1]=min(f[i*4+1],val+dist(p,sqr[i].zs));
if(inRange(p,up,dn,sqr[i].yx))
f[i*4+2]=min(f[i*4+2],val+dist(p,sqr[i].yx));
if(inRange(p,up,dn,sqr[i].ys))
f[i*4+3]=min(f[i*4+3],val+dist(p,sqr[i].ys));
if(inSquare(sqr[i],T)&&inRange(p,up,dn,T))
ans=min(ans,val+dist(p,T));
if(i+1<=n) //更新三角区域范围
{
Point lowerBound=Point(sqr[i].yx.x,max(sqr[i].yx.y,sqr[i+1].zx.y));
Point upperBound=Point(sqr[i].yx.x,min(sqr[i].ys.y,sqr[i+1].zs.y)); //矩形i与i+1相连部分是一条竖着的直线lowerBound-upperBound
if(p.x==sqr[i].yx.x)
{
if(lowerBound.y>p.y||upperBound.y<p.y)
{
f[(i+1)*4]=min(f[(i+1)*4],val+dist(p,sqr[i+1].zx));
f[(i+1)*4+1]=min(f[(i+1)*4+1],val+dist(p,sqr[i+1].zs));
return;
}
}
else //点p是在当前矩形的左侧,那么就要用矩形i与i+1的交界线段去更新三角形的可行区域
{
if(cross(dn-p,lowerBound-p)>0) dn=lowerBound;
if(cross(up-p,upperBound-p)<0) up=upperBound;
if(cross(up-p,dn-p)>0) return; //已经没有可行区域了
}
}
}
}
int main()
{
scanf("%d",&n);
for(int i=1;i<=n;i++)
{
int zxx,zxy,ysx,ysy;
scanf("%d%d%d%d",&zxx,&zxy,&ysx,&ysy);
sqr[i].zx=Point(zxx,zxy);
sqr[i].zs=Point(zxx,ysy);
sqr[i].yx=Point(ysx,zxy);
sqr[i].ys=Point(ysx,ysy);
}
scanf("%d%d",&S.x,&S.y);
scanf("%d%d",&T.x,&T.y);
if(S.x>T.x) swap(S,T);
for(int i=0;i<=4*n+4;i++) f[i]=1e20;
for(int i=1;i<=n;i++) //!!!!!
{
if(inSquare(sqr[i],S)) update(S,i,0);
update(sqr[i].zx,i,f[i*4]);
update(sqr[i].zs,i,f[i*4+1]);
update(sqr[i].yx,i,f[i*4+2]);
update(sqr[i].ys,i,f[i*4+3]);
}
double speed;
scanf("%lf",&speed);
printf("%lf\n",ans/speed);
return 0;
}















 417
417

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









