









YOLOV5目标检测----上手

2020年4月23日,YOLOV4开源
2020年6月10日,YOLOV5开源
这两个日子,可是把CV类公众号的运营者忙坏了,各大公众号都在忙着抢“首发”
当然,YOLOV4是货真价实的YOLO系列的第四个版本,虽然J.R大神宣布了“退役”,但是v4依然是其团队的研究成果,是具有正宗YOLO血统的
对于YOLOV5,其作者显然不是YOLO团队的,但是v5的作者也是yolo系列忠实粉丝。ultralytics团队实现的pytorch版本的yoloV3,广受好评,在github上获得了5.2K的star。
在YOLOV5开源这一天,其repo上就有人发了issue,说不应该使用yoloV5这个名字。
在下面讨论区,两派的声音势均力敌。
这个“you can you up“,简直笑到我了!

对于我来说,这个命名也就是一个代号,不管你叫啥,只要性能牛逼,我就给你点star
一、撕逼
我们现在回到YOLOV5这个算法上来
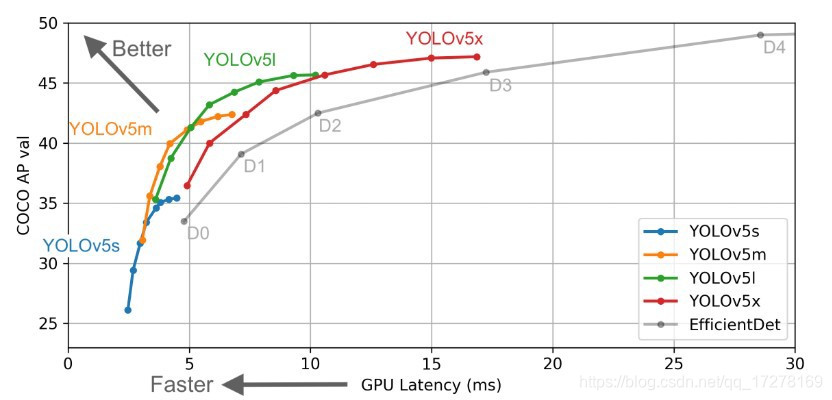
上图来自于yoloV5的repo,给出了不同大小v5模型和efficientDet的比较。
从图中可以看出,yoloV5不同大小的模型,其性能都优于efficientDet,但是有一点大部分人都觉得很奇怪,为啥没有跟yoloV4比较。既然名字都命名了V5,为啥没有与V4的对比实验。
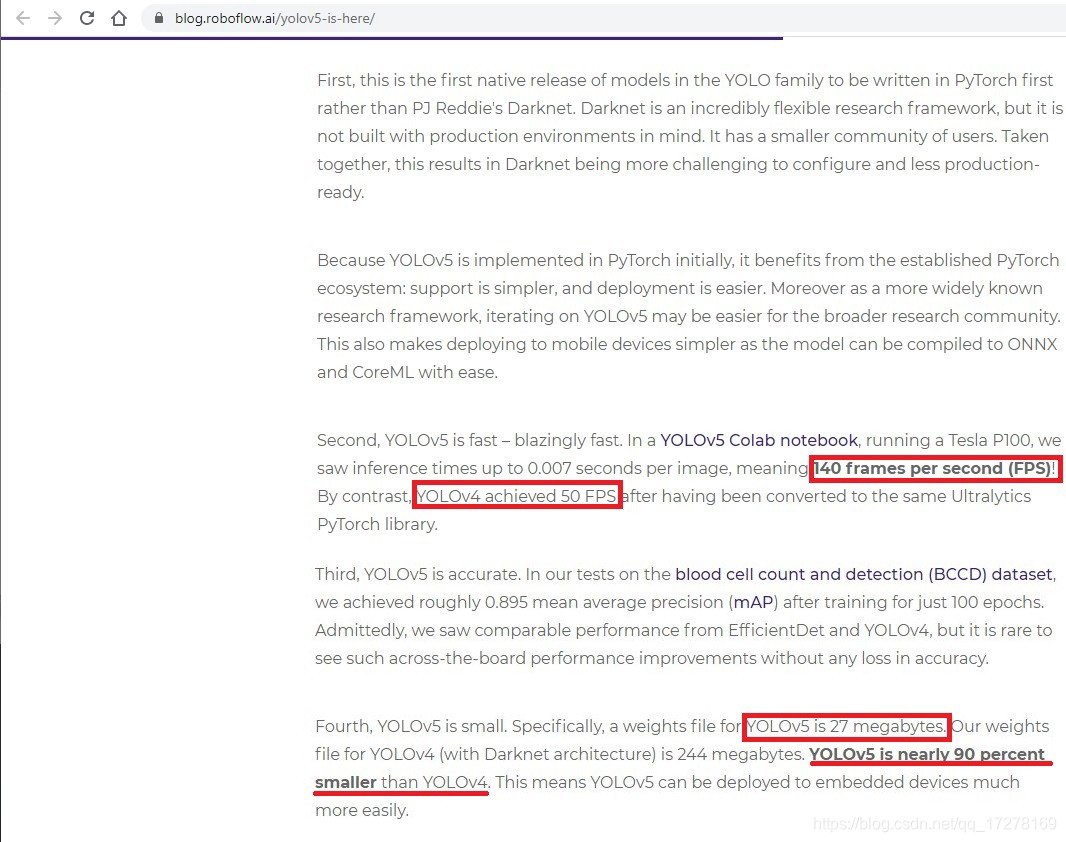
YoloV5 is here这篇博客中说了YOLOv5在Tesla P100显卡上运行超过140FPS,YOLOv4只能运行到50FPS;v5的模型大小是v4模型大小的十分之一,并且两者精度相当。
感兴趣的同学可以看下原文,截图如下。
到目前为止,YOLOV5还没有发表学术论文,ultralytics是一个公司,并不是一个学术组织。所以现在有很多人对github上发出来的对比数据是持怀疑态度的。详情可以看讨论区和社区
甚至,AlexeyAB也直接在issue怼上了
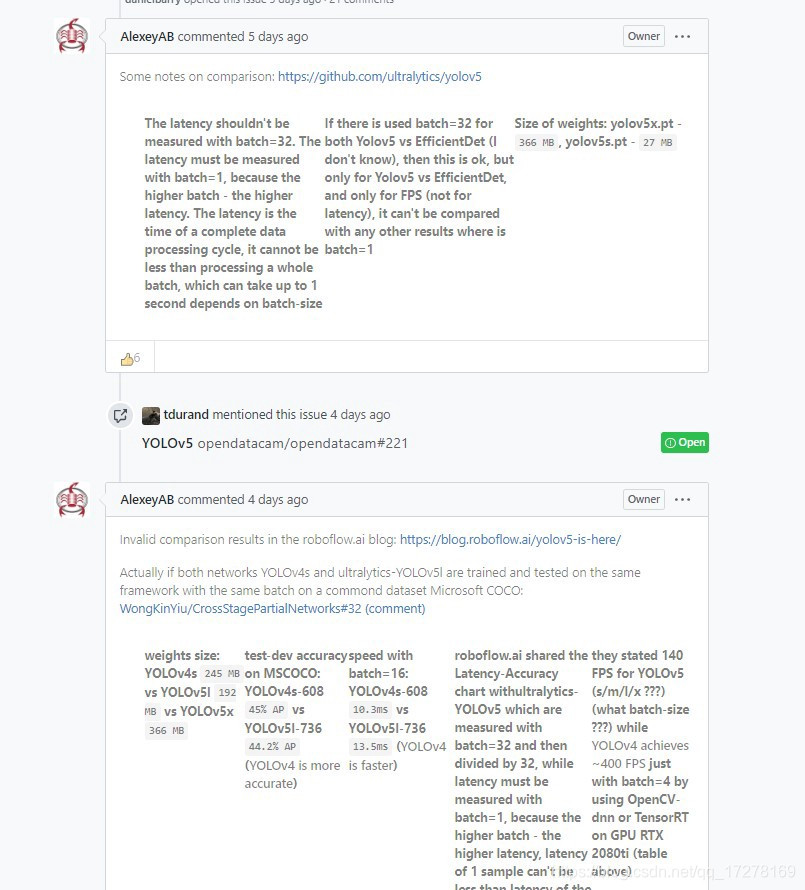
AlexeyAB的态度很明确,u团队做对比实验不科学。拿着小模型的v5和大模型的v4比速度,然后也没提供输入分辨率和batch_size。然后AlexeyAB自己做了对比实验,数据如上图。
然后 Ultralytics团队的Glenn- Jocher,对此作出了回应。表示他们原有计划是要写一篇paper来展示实验过程的,但是由于公司资源限制,这个计划被推迟了。毕竟公司是要恰饭的,可以理解。
关于YoloV4和YoloV5的对比测评,可以看RoboFlow写的这篇文章。这篇文章从yolo的历史开始写起,讨论了命名和自定义数据下的性能。
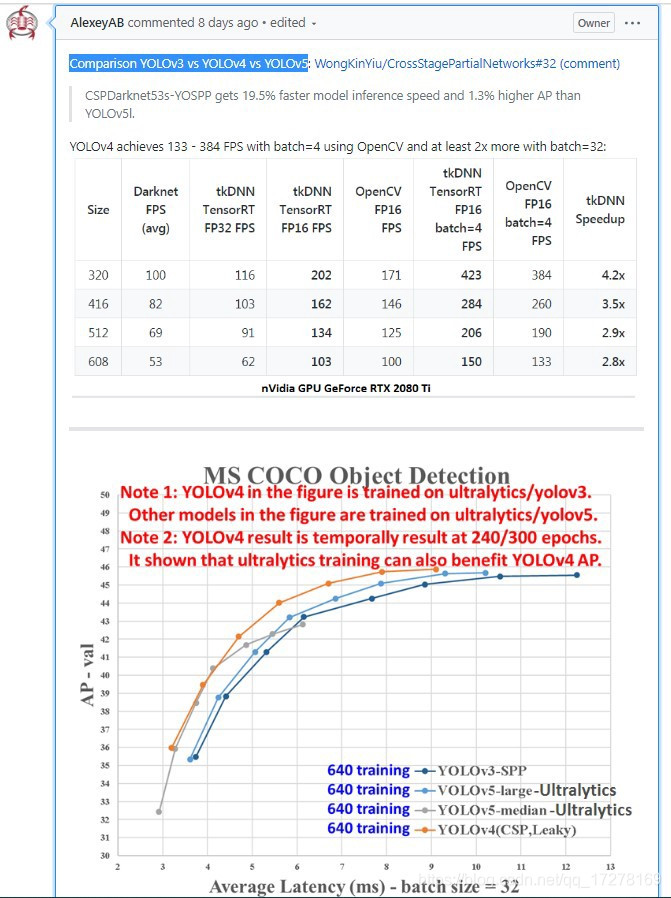
下图是AlexeyAB实验对比数据,分别对比了v3,v4和v5
上面的内容基本都是围绕着命名和性能在讨论(撕逼)
但是对于我们算法狗而言,无所谓啦,只要能开源,你叫啥都行!
把开源的变成自己的,把自己的变成祖传的。
二、训练自己的yoloV5
1、配置环境
git clone https://github.com/ultralytics/yolov5
pip install -U -r yolov5/requirements.txt
2、转换数据格式
将自己的xml或者json文件转换为yolo格式的txt文件
3、选择模型大小
可以选择yolo5s,yolo5m,yolo5l,yolo5x不同大小的模型,模型越大精度越高,速度也就相应越慢
4、修改对应配置文件
- data.yaml
- custom_yolov5m.yaml
训练过程可以参考yoloV5的wiki,也可以参考这个训练repo和另外一个训练教程
v5的训练速度还是很快的
我原来有个目标检测项目是使用pelee做的,由于硬件算力限制,不得已只能选轻量级的算法。所以yoloV5s和yolov5m对于轻量级算法选型应该是一个不错的选择。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









