







视频分割算法可以从时域和空域两个角度考虑。时域分割算法利用视频流时域连续性,通过 相邻帧的时域变化来检测运动目标。在摄像头静止的情况下,常用的方法有帧差法和减背景法。
帧差法比较直观实用,对光照的变化干扰不敏感,但是 对目标的检测不准确,对于缓慢运动的目标甚至可 能无法提取出目标边界,对于快速运动的目标提取 出的目标区域又过大。减背景法容易得到目标的准 确描述,对静止和非静止的目标都适用,但是背景更新的计算量比较大,还必须建立合适的模型,同时在 背景大幅运动的场合也不适用。
空域分割算法利用图像的空域属性( 颜色、 亮度、纹理以及边缘信息等) 来提取视频对象。例 如基于边缘的目标提取算法,虽然算法能检测出精 确的图像边缘,但是检测过程存在较大的盲目性,检 测出的边缘不仅包括所需要的运动目标的边缘,连 背景中的静止物体的边缘也一并被检测出来,这就 给目标分割带来困扰。
------------------------------------------------------------------------分界线----------------------------------------------------------------------------------------
1.运动目标检测
采集某一时间段里的视频序列图像,设f( x,y, t) 表示t时刻当前帧,其前后相邻的两帧分别用 f( x,y,t - 1) 和f( x,y,t + 1) 表示。t时刻相邻两帧之间作差分运算:
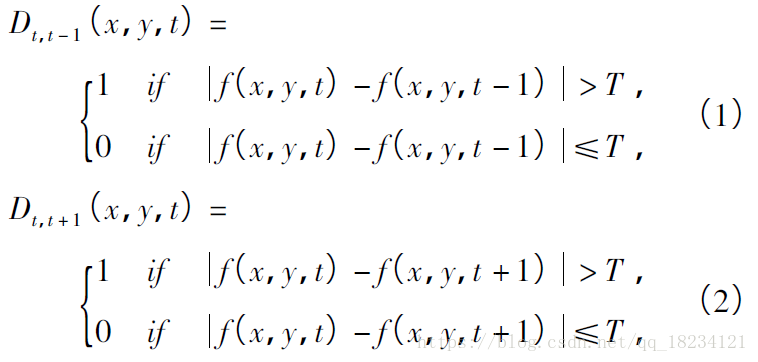
以下图为例:
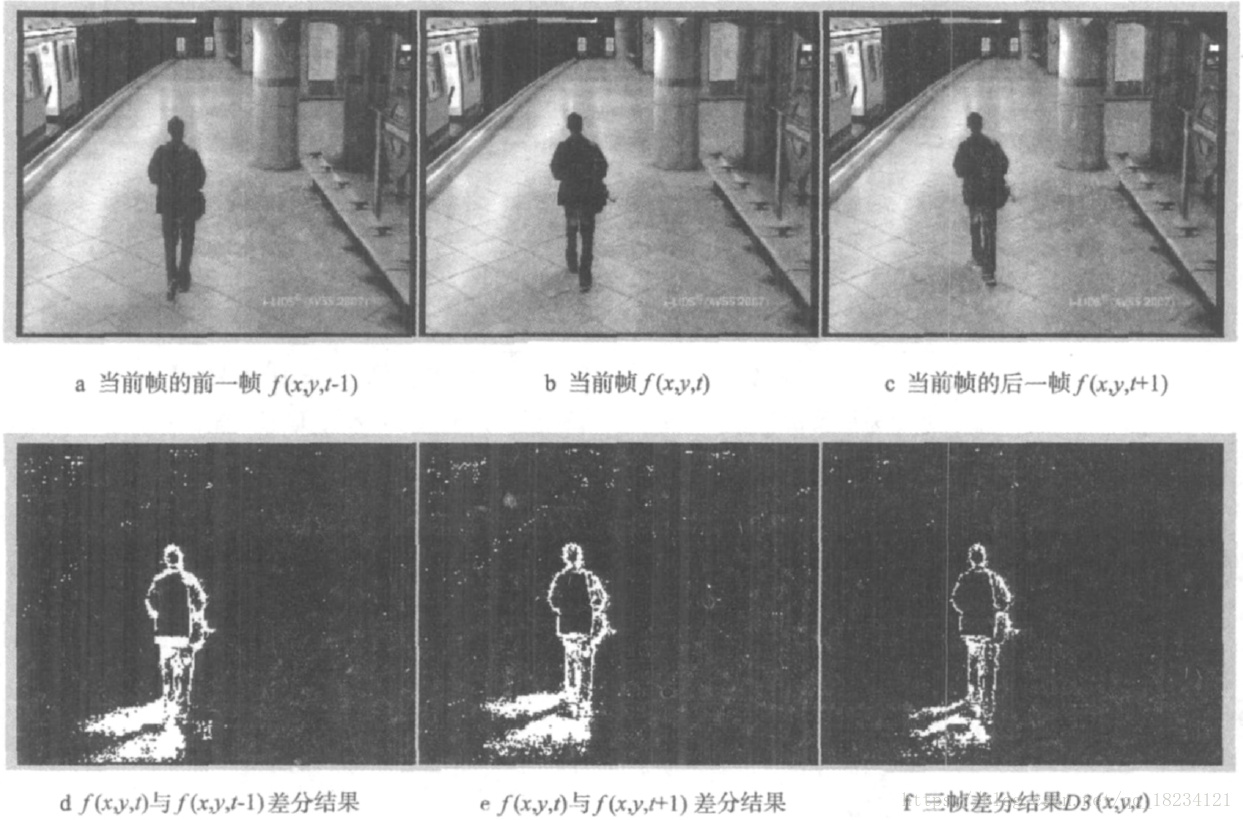
仅根据两帧序列图像间的差分来检测运动目标存在许多问题。如图1 所示,d、e 两帧图像差分的结果中,由于相邻两帧之间的差分并不完全是运动目标,上一帧被运动目标覆盖的背景,会在下一帧显露出来,并被误判为前景目标,这样导致得到的运动目标区域包括背景区域ÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1747
1747

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









