







 本文介绍了多层感知机(MLP)的基础知识,包括其非线性激活函数、隐藏层特性以及反向传播算法在训练中的应用。MLP通过多层神经元构造,能解决线性不可分问题,隐藏层神经元能够学习到输入数据的特征。此外,文章还提及了批量学习和在线学习两种训练策略。
本文介绍了多层感知机(MLP)的基础知识,包括其非线性激活函数、隐藏层特性以及反向传播算法在训练中的应用。MLP通过多层神经元构造,能解决线性不可分问题,隐藏层神经元能够学习到输入数据的特征。此外,文章还提及了批量学习和在线学习两种训练策略。
在前面我们所讨论的Rosenblatt感知机,其本质是一个单层神经网络。但这一网络局限于线性可分模式的分类问题。而由Widrow和Hoff(1960)提出的最小均方算法(LMS)也是基于权值可调的单个线性神经元。同样限制了这一算法的计算能力。为了克服上述局限,多层感知机(MLP)应运而生。
多层感知机:
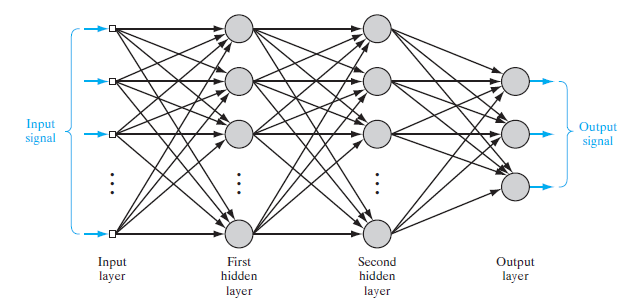
多层感知机的基本特征:
- 网络中每个神经元模型包含一个可微的非线性激活函数。
- 网络中包含一个或多个隐藏在输入与输出神经节点之间的层。
- 网络展示出高度的连接性,其强度由网络的突触权值决定的。
训练感知机的一个流行方法
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 395
395

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









