






Paper: Image Restoration with Mean-Reverting Stochastic Differential Equations
Project: Image Restoration with Mean-Reverting Stochastic Differential Equations
Contribution
-
提出一种新的均值回归随机微分方程用于各种图像复原任务(IR-SDE),在训练中该方程有closed-form解可以算出正确的score function,并可以在测试中使用网络来估计它。
-
我们提出使用最大似然估计来计算最优的reverse-time路径,并以此作为loss function。与普通的score-matching loss比,新提出的loss训练更加稳定,且生成的图像也更加精确。
-
该方法不需要知道图像恢复任务的任何先验知识或参数设置,也不局限于线性退化或简单非线性退化,只需改变数据集即可用于任意任务,非常灵活。且该基于diffusion的方法在去雨任务中获得了SOTA效果。
-
对该方法进行简单扩展后(修改网络结果,调参数等)在NTIRE 2023 Shadow Removal Challenge中获得了第二名的好成绩(LPIPS和MOS获得第一)。
1. 动机:Motivation
随着扩散模型的火热,各种各样的任务都开始引入diffusion的概念,而同作为生成式任务的图像复原也是如此,引入了大量结合diffusion的工作,如DDRM ,DPS ,DDNM 等。然而,目前绝大多数基于diffusion的图像复原工作都需要显式地知道图像降质的具体过程,特别如下形式:
其中 分别代表high-quality(HQ)和low-quality(LQ)图像,而
代码某个(非)线性退化过程以及额外噪声。
这样的好处是可以对退化过程进行显式建模,并对A和n进行分解从而简化过程。但缺点也相当明显:
1)A 必须是已知的退化算子,并且通常需要可(SVD)分解。这些要求对于大多数传统图像复原任务都是不可能知道的,如去雨去雾去阴影去运动模糊等等。
2)每个任务的退化核A可能都不一样,需要针对不同任务设计不同求解方程,导致很难将其快速应用扩展到不同任务中。
3)很难处理非线性或不可分解的退化过程(有部分paper在试图解决这些问题但通常都使问题更复杂了)。
那么能不能设计一种比较直接的diffusion模型,可以像普通卷积网络一样,直接改一下数据集就可处理各种各样简单或复杂的图像复原任务呢?当然可以!如我们今年的ICML论文:Image Restoration with Mean-Reverting Stochastic Differential Equations,其核心思想是通过mean-reverting SDE建模任意的图像退化过程。
2. 随机微分方程介绍: An Introduction to Stochastic Differential Equations (SDE)
这个东西咋一听很高深的样子,但原理其实并不复杂。想象如何逐步的给一个信号添加高斯噪声,并使得整个加噪是连续的过程。一个简单的答案是布朗运动(Brownian motion/Wiener process): 一个连续的高斯过程,其在每一个连续瞬间都会给系统注入稳定,随机的噪声。而基本的SDE即可以写为如下形式:
其中 表示布朗运动(或者叫Wiener process),而
和
分别为drift和dispersion方程。简单来说,
是高斯噪声,
控制整个SDE的“流向”,而
控制SDE的扩散程度或加噪速度。在score-based generative model中我们通常把上述方程叫做forward-SDE,对应于图像的退化过程,我们可以通过改变
来控制SDE最后是变为纯噪声还是带噪图像等。而与之对应的则是reverse-time SDE,其也是score-based generative model的核心。具体来说,理论上任何SDE都会有一个对应的逆过程(从噪声变为干净图像),如下方程:
其中 叫做score function,而
表示reverse-time Wiener process(即原本是加噪声现在变成减去噪声)。注意这里
和
都是已知的,未知项就只有
,我们可以通过多种方式来估计这个score,并模拟如上reverse-time SDE来恢复干净图像。具体推导Yang Song大佬在score-sde 这篇论文以及这个博客 里都有详细说明,关于reverse-time SDE我个人也参考了这篇博客 .
3. 核心方法
3.1 均值回归SDE(Mean-Reverting SDE)
考虑如下特殊的一种SDE:
与普通的SDE相比这里多了一个 表示指定的值或者状态(通常叫做均值),所以叫做Mean-Reverting SDE。这样构造SDE的好处是在一定步数后,整个SDE一定会流向带有稳定高斯噪声的均值 。这里的
可以跟
有关系也可以无任何关系,可以简单地看作从
到
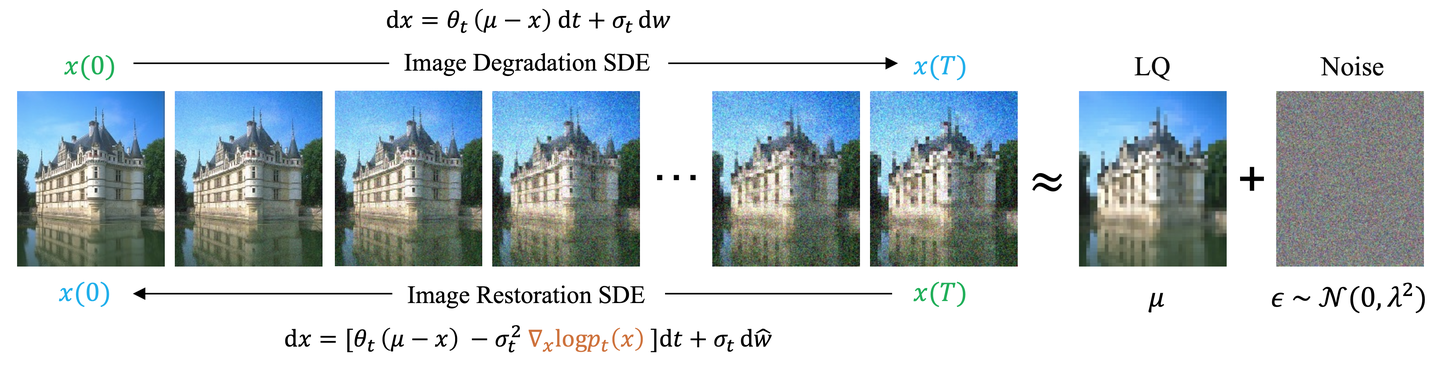
的插值并逐步添加噪声的过程。在图像恢复这个任务中,我们可以设置 为退化后的LQ图像。只要有成对的Input和GT图像,我们不需要知道任何退化的先验知识或相关参数等,就可以通过这种特殊的SDE建模图像退化过程,并通过在LQ图像上添加固定噪声模拟reverse-time SDE来复原图像。其reverse-time SDE公式为:
而整个流程图如下所示:
注意与普通score估计的方式不同,这里我们提出的SDE是对score function 有确定解的。具体来说,令 ,此时可以证明forward-SDE的解为:
其中 是已知的(因为所有的
都是预设好的,类似于DDPM里的
以及
)。而其任意时刻的转移概率为正态分布
,且有
具体的推导请看paper的appendix部分。在训练中,给定LQ和GT图像对,根据以上解我们即可以算出正确的score为:
然后就可以通过网络来估计这个score了。与score-matching之类的方法比,这里估计的score更加准确且是针对图像复原任务本身的(包含了降质退化过程)。
3.2 最大似然学习:Maximum Likelihood Learning
这里的核心思想是在图像复原任务中直接学习噪声是相当困难的,因为图像退化本身就可能包含自然噪声以及各种复杂的变化过程。所以能不能通过直接学习图像逐步的降噪提质过程来稳定学习呢?或者说能不能找到一个最优路径,可以使得模型沿着最优的图像复原方向进行估计,从而得到更精确的HQ图像?
由于上面提到IR-SDE中状态转移概率(transition kernel)是可求解的,自然而然我们想到了贝叶斯法则:可以使用最大似然估计的方式来求解最优路径,即是求:
其中 表示最优的还原路径。而根据贝叶斯法则,我们可以计算出:
具体的推导请看paper的appendix部分。随后我们就可以使用网络估计噪声并学习最优的复原步骤了。
注意这里的方式其实也可以从另一个角度来推出DDPM的均值。感兴趣的同学可以自己推一下,我会把这个推导之后更新到camera ready以及新的arxiv版本的appendix中。
4. 实验结果
又到了喜闻乐见的实验贴表贴图部分了。但感觉这些还是直接看论文比较方便,这里就简单贴一些对比图好了。

编辑切换为居中
添加图片注释,不超过 140 字(可选)

编辑切换为居中
Real-world图像去雾

编辑切换为居中
Real-world图像去阴影
==============================================
======== 分割线 ============
最后我们的改进版本(Refusion)赢得了CVPR图像去阴影比赛(NTIRE 2023)的第二名(感知上第一名),感觉对于diffusion模型来说在这种real-world数据的比赛里能拿到这个成绩已经很不错了哈哈。同时在这篇论文里我们还提出了一种基于U-Net的latent-diffusion模型,也是非常的有意思^_^。下面给出paper和code的链接:
Paper:Refusion: Enabling Large-Size Realistic Image Restoration with Latent-Space Diffusion Models














 3817
3817











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









