









Binder—ServiceManager 启动过程
一、main:入口函数
[–>service_manager.c, main()]
int main(int argc, char **argv) {
// 打开设备文件 driver = "/dev/binder",并映射设备文件到本进程地址空间
bs = binder_open(driver, 128*1024);
// 注册成为 Binder 进程间通信机制的上下文管理者
binder_become_context_manager(bs);
// 循环等待和处理 Client 进程的通信请求
binder_loop(bs, svcmgr_handler);
}
// binder.c
struct binder_state
{
int fd; // 打开设备文件 “/dev/binder” 后得到的文件描述符(用于和 Binder 驱动程序交互)
void *mapped; // 映射设备文件后得到的地址空间的起始地址
size_t mapsize; // 映射设备文件后得到的地址空间的地址空间大小(默认为 128KB)
};
1.1 binder_open:打开和映射 Binder 设备文件
[–>binder.c, binder_open()]
// driver = "/dev/binder"
// mapsize = 128*1024
struct binder_state *binder_open(const char* driver, size_t mapsize) {
struct binder_state *bs;
// open():通过系统调用陷入内核,打开 Binder 设备驱动(会调用驱动的 binder_open 函数)
// O_RDWR:读写模式
// O_CLOEXEC:当调用 exec 成功后,文件描述符会自动关闭,在 open 中是原子操作
bs->fd = open(driver, O_RDWR | O_CLOEXEC);
if (bs->fd < 0) {
goto fail_open; // 无法打开 Binder 设备
}
// 映射设备文件后得到的地址空间的地址空间大小,传入的是 128*1024(128KB)
bs->mapsize = mapsize;
// 映射设备文件后得到的地址空间的起始地址,mmap():通过系统调用,进行内存映射(必须是 page 的整数倍)
bs->mapped = mmap(NULL, mapsize, PROT_READ, MAP_PRIVATE, bs->fd, 0);
if (bs->mapped == MAP_FAILED) {
goto fail_map; // Binder 设备内存无法映射
}
return bs;
fail_map:
close(bs->fd);
fail_open:
free(bs);
return NULL;
}
open 经过系统调用,进入 Binder 驱动,调用 binder_open(),该方法会在 Binder 驱动层创建一个 binder_proc 对象(用于描述当前进程的 Binder 进程间通信状态),再将 binder_proc 对象赋值给 fd->private_data,同时放入全局链表 binder_procs
mmap 经过系统调用,进入 Binder 驱动,调用 binder_mmap(),该方法会在 Binder 驱动层创建一个 binder_buffer 对象,并放入当前 binder_proc 的 proc->buffers 内核缓冲区链表
1.2 binder_become_context_manager:注册为 Binder 进程间通信机制的上下文管理者
[–>binder.c, binder_become_context_manager()]
static struct binder_node *binder_context_mgr_node;
static uid_t binder_context_mgr_uid = -1;
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg) {
int ret;
// 取出 binder_open 中给 ServiceManager 创建的 binder_proc
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
// 获取当前线程,首次创建并保存,之后直接返回
thread = binder_get_thread(proc);
// cmd = BINDER_SET_CONTEXT_MGR
switch (cmd) {
case BINDER_SET_CONTEXT_MGR:
// binder_context_mgr_node 默认为空,不为空说明当前已注册为 Binder 进程间通信机制的上下文管理者
if (binder_context_mgr_node != NULL) {
ret = -EBUSY;
goto err;
}
// binder_context_mgr_uid 默认为 -1,不为 -1 说明其它进程已注册 Binder 进程间通信机制的上下文管理者
if (binder_context_mgr_uid != -1) {
// binder_context_mgr_uid 不是当前进程的有效用户 id
if (binder_context_mgr_uid != current->cred->euid) {
ret = -EPERM;
goto err; // 出错
}
} else // binder_context_mgr_uid 默认为 -1
// binder_context_mgr_uid 赋值为当前进程的有效用户 id
binder_context_mgr_uid = current->cred->euid;
// 为 ServiceManager 创建一个 Binder 实体对象
binder_context_mgr_node = binder_new_node(proc, NULL, NULL);
if (binder_context_mgr_node == NULL) {
ret = -ENOMEM;
goto err;
}
binder_context_mgr_node->local_weak_refs++;
binder_context_mgr_node->local_strong_refs++;
binder_context_mgr_node->has_strong_ref = 1;
binder_context_mgr_node->has_weak_ref = 1;
break;
}
}
[–>kernel/drivers/android/binder.c, binder_new_node()]
// ptr = NULL
// cookie = NULL
static struct binder_node *binder_new_node(struct binder_proc *proc, binder_uintptr_t ptr, binder_uintptr_t cookie)
{
struct rb_node **p = &proc->nodes.rb_node;
struct rb_node *parent = NULL;
struct binder_node *node;
// 首次进入,红黑树中没有节点,跳过 while 循环
while (*p) {
parent = *p;
node = rb_entry(parent, struct binder_node, rb_node);
if (ptr < node->ptr)
p = &(*p)->rb_left;
else if (ptr > node->ptr)
p = &(*p)->rb_right;
else
return NULL;
}
// 创建一个 Binder 实体对象,并且对它进行初始化,最后将它加入到宿主进程的成员变量 nodes 红黑树中
node = kzalloc(sizeof(*node), GFP_KERNEL); // 分配内核空间
if (node == NULL)
return NULL;
binder_stats_created(BINDER_STAT_NODE);
// 将新创建的 node 对象添加到 proc 红黑树
rb_link_node(&node->rb_node, parent, p);
rb_insert_color(&node->rb_node, &proc->nodes);
node->debug_id = ++binder_last_id;
// 将传入的 proc:binder_proc* 加入到 node:binder_node* 的 proc
node->proc = proc;
node->ptr = ptr;
node->cookie = cookie;
// 设置 binder_work 的 type
node->work.type = BINDER_WORK_NODE;
INIT_LIST_HEAD(&node->work.entry);
INIT_LIST_HEAD(&node->async_todo);
return node;
}
&(*p)->rb_left
&(*p)->rb_left = &((*p)->rb_left)
-> 的优先级比 & 高
首次进入 binder_new_node:
- 会在 Binder 驱动层创建 binder_node 实体对象
- 将当前 binder_proc 加入到 binder_node 的 proc
- 创建 binder_node 的 async_todo 和 binder_work.entry 两个队列
1.3 binder_loop:循环等待 Client 进程请求
[–>binder.c, binder_loop()]
void binder_loop(struct binder_state *bs, binder_handler func) {
int res;
struct binder_write_read bwr;
uint32_t readbuf[32];
readbuf[0] = BC_ENTER_LOOPER;
// 发送命令协议 BC_ENTER_LOOPER 给 Binder 驱动,将 Service Manager 进程主线程注册为 Binder 线程
binder_write(bs, readbuf, sizeof(uint32_t));
bwr.write_size = 0; // 进程用户态地址空间传递到内核数据的大小
bwr.write_consumed = 0; // 进程用户态地址空间传递到内核数据中已经被内核态处理的大小
bwr.write_buffer = 0; // 进程用户态地址空间传递到内核数据的起始地址
for (;;) { // 进入循环,不断地 binder 读写过程
// 每次循环前,重置 read 相关的参数
bwr.read_size = sizeof(readbuf); // 总共可供给驱动写入的字节数,read_buffer 可供内核使用的大小
bwr.read_consumed = 0;
bwr.read_buffer = (uintptr_t)readbuf; // 内核驱动发送给进程数据 buffer 的起始地址
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
if (res < 0) {
break;
}
// 解析 binder 信息
res = binder_parse(bs, 0, (uintptr_t)readbuf, bwr.read_consumed, func); // func 传入的是 svcmgr_handler
if (res == 0) {
break;
}
if (res < 0) {
break;
}
}
}
[–>binder.c, binder_write()]
// data = BC_ENTER_LOOPER
int binder_write(struct binder_state *bs, void *data, size_t len)
{
struct binder_write_read bwr;
int res;
bwr.write_size = len; // len 传入的是 sizeof(uint32_t),大小为 4
bwr.write_consumed = 0;
// write_buffer 指向缓冲区的起始地址,其内容为 BC_ENTER_LOOPER 请求协议号
bwr.write_buffer = (uintptr_t) data;
bwr.read_size = 0;
bwr.read_consumed = 0;
bwr.read_buffer = 0;
// 调用驱动 binder_ioctl
// write_size 大于 0,read_size 等于 0,只写不读,写完立马返回用户空间
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
return res;
}
通过 ioctl() 将 binder_write_read 数据发给 Binder 驱动,调用 binder_ioctl() 方法
[–>kernel/drivers/android/binder.c, binder_ioctl()]
// cmd = BINDER_WRITE_READ
// arg = &binder_write_read
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
// 取出 binder_open 中给 ServiceManager 创建的 binder_proc
struct binder_roc *proc = filp->private_ata;
struct binder_thread *thread;
void __user *ubuf = (void __user *)arg;
// 获取当前线程对应的 binder_thread,在 binder_become_context_manager 中已创建,这里直接返回
thread = binder_get_thread(proc);
// cmd = BINDER_WRITE_READ
switch (cmd) {
case BINDER_WRITE_READ: {
struct binder_write_read bwr;
// 拷贝从用户空间传来的 binder_write_read,保存到 bwr 变量
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}
// 拷贝的 bwr 中,只有 write_size 大于 0,write_buffer 只包含 BC_ENTER_LOOPER
if (bwr.write_size > 0) {
ret = binder_thread_write(proc, thread, (void __user *)bwr.write_buffer, bwr.write_size, &bwr.write_consumed);
if (ret < 0) {
bwr.read_consumed = 0;
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto err;
}
}
if (bwr.read_size > 0) {
ret = binder_thread_read(proc, thread, (void __user *)bwr.read_buffer, bwr.read_size, &bwr.read_consumed, filp->f_flags & O_NONBLOCK);
if (!list_empty(&proc->todo))
wake_up_interruptible(&proc->wait);
if (ret < 0) {
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto err;
}
}
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}
break;
}
default:
ret = -EINVAL;
goto err;
}
// 没有出错,则最终返回 0
ret = 0;
err:
if (thread)
thread->looper &= ~BINDER_LOOPER_STATE_NEED_RETURN;
return ret;
}
[–>kernel/drivers/android/binder.c, binder_thread_write()]
static int binder_thread_write(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed)
{
uint32_t cmd;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
while (ptr < end && thread->return_error == BR_OK) {
// ptr 实际为 write_buffer,因此 cmd = BC_ENTER_LOOPER
if (get_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
// cmd = BC_ENTER_LOOPER
switch (cmd) {
case BC_ENTER_LOOPER:
// 设置线程的 looper 状态为 BINDER_LOOPER_STATE_ENTERED
thread->looper |= BINDER_LOOPER_STATE_ENTERED;
break;
}
*consumed = ptr - buffer;
}
return 0;
}
binder_thread_write 处理完命令协议 BC_ENTER_LOOPER 后,返回 binder_ioctl 中,然后返回到用户空间的 binder_write 中,最后返回到 binder_loop,开始执行 for 循环中的内容
[–>binder.c, binder_loop()]
void binder_loop(struct binder_state *bs, binder_handler func) {
...
for (;;) { // 进入循环,不断地 binder 读写过程
// 每次循环前,重置 read 相关的参数
bwr.read_size = sizeof(readbuf); // 总共可供给驱动写入的字节数,read_buffer 可供内核使用的大小
bwr.read_consumed = 0;
bwr.read_buffer = (uintptr_t)readbuf; // 内核驱动发送给进程数据 buffer 的起始地址
// 调用驱动 binder_ioctl
// read_size 大于 0,write_size 等于 0,只读不写
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
if (res < 0) {
break;
}
// 解析 binder 信息
res = binder_parse(bs, 0, (uintptr_t)readbuf, bwr.read_consumed, func); // func 传入的是 svcmgr_handler
if (res == 0) {
break;
}
if (res < 0) {
break;
}
}
}
[–>kernel/drivers/android/binder.c, binder_ioctl()]
// cmd = BINDER_WRITE_READ
// arg = &binder_write_read
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
// 取出 binder_open 中给 ServiceManager 创建的 binder_proc
struct binder_roc *proc = filp->private_ata;
struct binder_thread *thread;
void __user *ubuf = (void __user *)arg;
// 获取当前线程对应的 binder_thread,在 binder_become_context_manager 中已创建,这里直接返回
thread = binder_get_thread(proc);
// cmd = BINDER_WRITE_READ
switch (cmd) {
case BINDER_WRITE_READ: {
struct binder_write_read bwr;
// 拷贝从用户空间传来的 binder_write_read,保存到 bwr 变量
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}
if (bwr.write_size > 0) {
ret = binder_thread_write(proc, thread, (void __user *)bwr.write_buffer, bwr.write_size, &bwr.write_consumed);
if (ret < 0) {
bwr.read_consumed = 0;
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto err;
}
}
// 拷贝的 bwr 中,只有 read_size 大于 0,read_buffer 用于接收内核驱动发送给进程 ServiceManager 的数据
if (bwr.read_size > 0) {
ret = binder_thread_read(proc, thread, (void __user *)bwr.read_buffer, bwr.read_size, &bwr.read_consumed, filp->f_flags & O_NONBLOCK);
if (!list_empty(&proc->todo))
wake_up_interruptible(&proc->wait);
if (ret < 0) {
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto err;
}
}
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}
break;
}
default:
ret = -EINVAL;
goto err;
}
// 没有出错,则最终返回 0
ret = 0;
err:
if (thread)
thread->looper &= ~BINDER_LOOPER_STATE_NEED_RETURN;
return ret;
}
[–>kernel/drivers/android/binder.c, binder_thread_read()]
static int binder_thread_read(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed, int non_block)
{
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
int ret = 0;
int wait_for_proc_work;
if (*consumed == 0) {
// 将 BR_NOOP 写回到用户传进来的缓冲区
// ptr = buffer + *consumed = bwr.read_buffer + bwr.consumed = bwr.read_buffer + 0 = bwr.read_buffer
if (put_user(BR_NOOP, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
}
retry:
// 线程事务堆栈为空(没有等待其他线程完成事务) && 线程 todo 队列为空,此时可以去等待处理进程 todo 队列中的待处理项
wait_for_proc_work = thread->transaction_stack == NULL && list_empty(&thread->todo);
// 设置线程处于空闲状态
thread->looper &= ~BINDER_LOOPER_STATE_WAITING;
if (wait_for_proc_work)
proc->ready_threads++;
// 线程等待处理进程 todo 队列中可能存在的未处理工作项
if (wait_for_proc_work) {
if (!(thread->looper & (BINDER_LOOPER_STATE_REGISTERED | BINDER_LOOPER_STATE_ENTERED))) {
wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
}
binder_set_nice(proc->default_priority);
// non_block 表示不阻塞,没有可处理工作项时,不休眠立即返回
if (non_block) {
if (!binder_has_proc_work(proc, thread))
ret = -EAGAIN;
} else
// 线程睡眠等待进程有待处理工作项
ret = wait_event_interruptible_exclusive(proc->wait, binder_has_proc_work(proc, thread));
} else { // 线程处理自己 todo 队列中可能存在的未处理工作项
if (non_block) {
if (!binder_has_thread_work(thread))
ret = -EAGAIN;
} else
// 线程睡眠等待自己有待处理工作项
ret = wait_event_interruptible(thread->wait, binder_has_thread_work(thread));
}
if (wait_for_proc_work)
proc->ready_threads--;
// 取消线程处于空闲状态
thread->looper &= ~BINDER_LOOPER_STATE_WAITING;
if (ret)
return ret;
// while 循环用于处理进程或线程 todo 队列中存在的未处理工作项
while (1) {
... // 暂不分析处理工作项(假定暂无需要处理的工作项)
}
done:
*consumed = ptr - buffer;
if (proc->requested_threads + proc->ready_threads == 0 && // 正在请求的次数 + 空闲线程数 = 0,即两个都为 0
proc->requested_threads_started < proc->max_threads && // 通过请求增加的线程数 < 最大线程数(该值在 ProcessState.cpp 的 open_driver 中设置为 15)
(thread->looper & (BINDER_LOOPER_STATE_REGISTERED | BINDER_LOOPER_STATE_ENTERED))) { // 当前线程是一个 Binder 线程(已注册成为 Binder 线程)
proc->requested_threads++; // requested_threads + 1,则 if 条件不满足,一次只能增加一个线程,当线程增加成功后,驱动程序会将 requested_threads 会减一
// 将返回协议 BR_SPAWN_LOOPER 写入到用户空间缓冲区 buffer,请求进程 proc 创建一个新的线程加入到 Binder 线程池中
if (put_user(BR_SPAWN_LOOPER, (uint32_t __user *)buffer))
return -EFAULT;
}
return 0;
}
至此, ServiceManager 进程启动过程分析完毕。若 ServiceManager 进程的主线程没有待处理的工作项,则此时就会睡眠在 Binder 驱动程序的 binder_thread_read 中,等待 Client 进程(向 Server 进程 ServiceManager 发送请求)的 Service 组件(向 Client 进程提供服务)或 Client 组件(Service 代理对象,向 Server 进程请求服务)
这里的 Service 组件和 Client 组件是 Binder 进程间通信机制中的概念
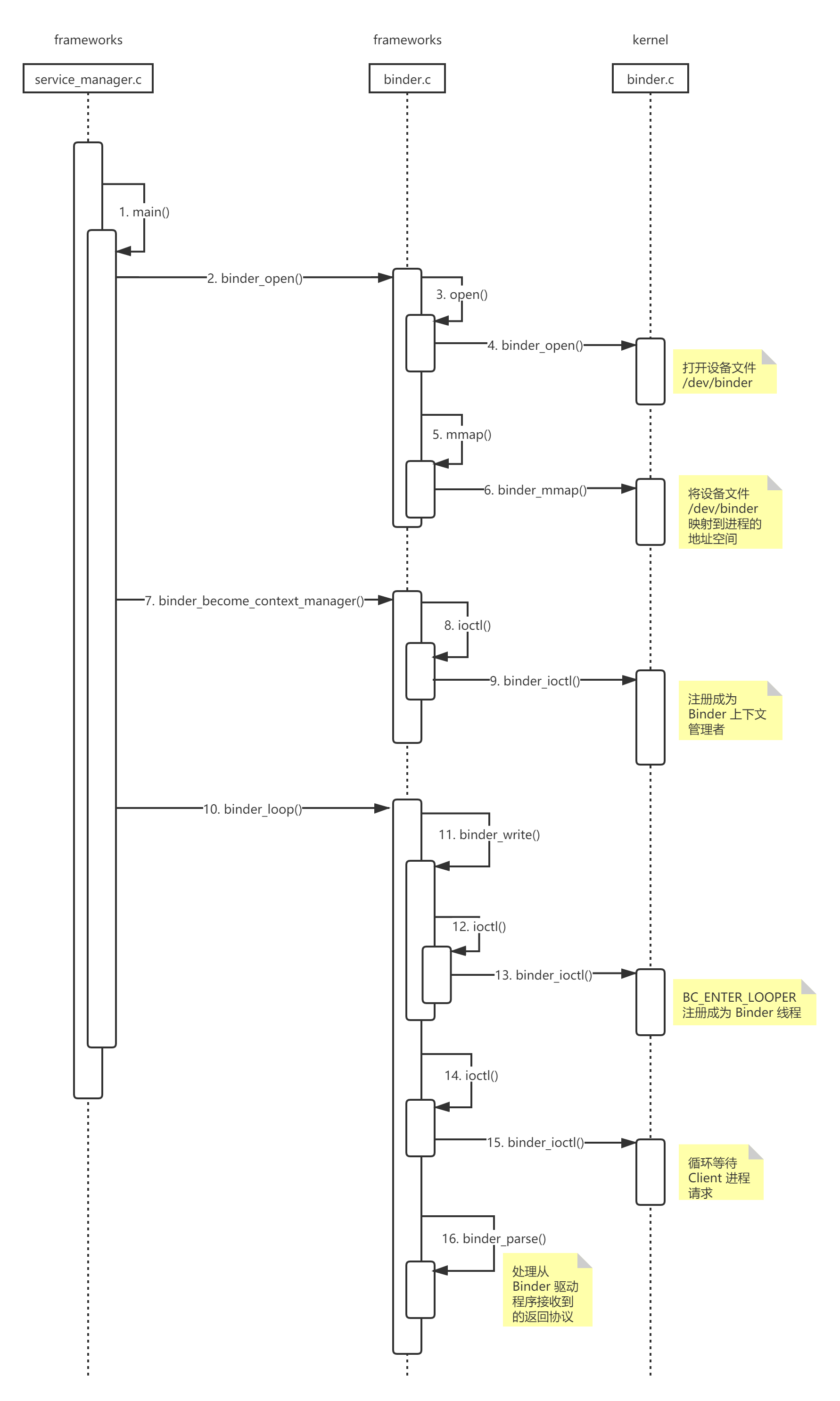
二、ServiceManager 启动过程时序图















 588
588











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









