







《MATLAB实战训练营:从入门到工业级应用》高阶挑战篇-✈️ 用无人机仿真玩转PID控制:MATLAB四旋翼仿真建模全攻略 🚁
欢迎来到这篇超级详细的MATLAB四旋翼无人机仿真教程!无论你是控制理论爱好者、无人机发烧友,还是MATLAB编程新手,这篇文章都将带你从零开始,一步步构建一个完整的四旋翼无人机PID控制系统仿真模型。准备好开始这场空中冒险了吗?让我们开始这段有趣的旅程吧!Let’s go! 🎯
1. 四旋翼无人机基础入门 🚀
1.1 四旋翼无人机的工作原理
四旋翼无人机,顾名思义就是有四个旋翼的飞行器 ✨。它的飞行原理其实非常有趣:
- 四个电机(M1-M4)呈十字形排列
- 对角电机旋转方向相同(M1和M3同向,M2和M4同向)
- 通过改变四个电机的转速来实现各种飞行动作
1.2 基本运动控制
四旋翼有6个自由度,但只有4个控制输入(四个电机的转速),属于欠驱动系统。基本运动控制包括:
| 运动类型 | 控制方法 | 示意图 |
|---|---|---|
| 垂直运动(升降) | 同时增加/减少所有电机转速 | ⬆️⬇️ |
| 俯仰运动(前后) | 增加前部/后部电机转速 | ✈️→ |
| 横滚运动(左右) | 增加左侧/右侧电机转速 | 🚁←→ |
| 偏航运动(旋转) | 增加对角线电机转速 | 🔄 |
💡 有趣的事实:四旋翼无人机本质上是一个不稳定的系统,这正是我们需要PID控制的原因!
2. 数学模型建立 📐
要仿真四旋翼,首先需要建立它的数学模型。我们采用牛顿-欧拉方程来描述四旋翼的动力学。
2.1 坐标系定义
我们定义两个坐标系:
- 地面坐标系(惯性系):固定在地面,用于描述无人机的位置
- 机体坐标系:固定在无人机上,随无人机一起运动
2.2 动力学方程
四旋翼的6自由度动力学方程可以表示为:
平移运动:
m
d
2
x
d
t
2
=
(
sin
ψ
sin
ϕ
+
cos
ψ
sin
θ
cos
ϕ
)
U
1
m \frac{d^2x}{dt^2} = (\sin\psi \sin\phi + \cos\psi \sin\theta \cos\phi) U_1\
mdt2d2x=(sinψsinϕ+cosψsinθcosϕ)U1
m d 2 y d t 2 = ( − cos ψ sin ϕ + sin ψ sin θ cos ϕ ) U 1 m \frac{d^2y}{dt^2} = (-\cos\psi \sin\phi + \sin\psi \sin\theta \cos\phi) U_1 mdt2d2y=(−cosψsinϕ+sinψsinθcosϕ)U1
m d 2 z d t 2 = − m g + ( cos θ cos ϕ ) U 1 m \frac{d^2z}{dt^2} = -mg + (\cos\theta \cos\phi) U_1 mdt2d2z=−mg+(cosθcosϕ)U1
旋转运动:
I
x
x
d
2
ϕ
d
t
2
=
θ
˙
ψ
˙
(
I
y
y
−
I
z
z
)
+
l
U
2
I_{xx} \frac{d^2\phi}{dt^2} = \dot{\theta}\dot{\psi}(I_{yy} - I_{zz}) + l U_2
Ixxdt2d2ϕ=θ˙ψ˙(Iyy−Izz)+lU2
I y y d 2 θ d t 2 = ϕ ˙ ψ ˙ ( I z z − I x x ) + l U 3 I_{yy} \frac{d^2\theta}{dt^2} = \dot{\phi}\dot{\psi}(I_{zz} - I_{xx}) + l U_3 Iyydt2d2θ=ϕ˙ψ˙(Izz−Ixx)+lU3
I z z d 2 ψ d t 2 = ϕ ˙ θ ˙ ( I x x − I y y ) + U 4 I_{zz} \frac{d^2\psi}{dt^2} = \dot{\phi}\dot{\theta}(I_{xx} - I_{yy}) + U_4 Izzdt2d2ψ=ϕ˙θ˙(Ixx−Iyy)+U4
其中:
m:无人机质量l:电机到质心的距离Ixx, Iyy, Izz:转动惯量U₁-U₄:控制输入
2.3 控制输入与电机转速关系
控制输入与电机转速的关系为:
[
U
1
U
2
U
3
U
4
]
=
[
1
1
1
1
0
−
l
0
l
l
0
−
l
0
c
−
c
c
−
c
]
[
F
1
F
2
F
3
F
4
]
\begin{bmatrix} U_1 \\ U_2 \\ U_3 \\ U_4 \end{bmatrix} = \begin{bmatrix} 1 & 1 & 1 & 1 \\ 0 & -l & 0 & l \\ l & 0 & -l & 0 \\ c & -c & c & -c \end{bmatrix} \begin{bmatrix} F_1 \\ F_2 \\ F_3 \\ F_4 \end{bmatrix}
U1U2U3U4
=
10lc1−l0−c10−lc1l0−c
F1F2F3F4
其中F₁-F₄是四个电机产生的升力,c是反扭矩系数。
3. MATLAB仿真环境搭建 💻
现在让我们开始用MATLAB搭建仿真环境吧!
3.1 初始化参数
首先创建一个新的MATLAB脚本quadcopter_sim.m,并添加以下初始化代码:
clear all; close all; clc;
%% 无人机物理参数
params.m = 1.2; % 质量(kg)
params.g = 9.81; % 重力加速度(m/s^2)
params.l = 0.25; % 电机到质心的距离(m)
% 转动惯量(kg·m^2)
params.Ixx = 0.0234;
params.Iyy = 0.0234;
params.Izz = 0.0468;
params.c = 0.01; % 反扭矩系数
params.k = 1.2e-5; % 升力系数
params.b = 1e-6; % 阻力系数
%% 仿真参数
tspan = [0 20]; % 仿真时间范围
params.dt = 0.01; % 时间步长(s)
t = tspan(1):params.dt:tspan(2);
%% 初始状态
% [x y z x_dot y_dot z_dot phi theta psi phi_dot theta_dot psi_dot]
initial_state = zeros(12,1); % 全部初始化为0
3.2 实现动力学方程
创建一个函数文件quadcopter_ode.m来实现动力学方程:
function state_dot = quadcopter_ode(t, state, params, U)
% 解包状态变量
x = state(1); y = state(2); z = state(3);
x_dot = state(4); y_dot = state(5); z_dot = state(6);
phi = state(7); theta = state(8); psi = state(9);
phi_dot = state(10); theta_dot = state(11); psi_dot = state(12);
% 解包控制输入
U1 = U(1); U2 = U(2); U3 = U(3); U4 = U(4);
% 平移加速度
x_ddot = (sin(psi)*sin(phi) + cos(psi)*sin(theta)*cos(phi)) * U1 / params.m;
y_ddot = (-cos(psi)*sin(phi) + sin(psi)*sin(theta)*cos(phi)) * U1 / params.m;
z_ddot = -params.g + (cos(theta)*cos(phi)) * U1 / params.m;
% 旋转加速度
phi_ddot = theta_dot*psi_dot*(params.Iyy-params.Izz)/params.Ixx + params.l*U2/params.Ixx;
theta_ddot = phi_dot*psi_dot*(params.Izz-params.Ixx)/params.Iyy + params.l*U3/params.Iyy;
psi_ddot = phi_dot*theta_dot*(params.Ixx-params.Iyy)/params.Izz + U4/params.Izz;
% 组装状态导数
state_dot = zeros(12,1);
state_dot(1) = x_dot;
state_dot(2) = y_dot;
state_dot(3) = z_dot;
state_dot(4) = x_ddot;
state_dot(5) = y_ddot;
state_dot(6) = z_ddot;
state_dot(7) = phi_dot;
state_dot(8) = theta_dot;
state_dot(9) = psi_dot;
state_dot(10) = phi_ddot;
state_dot(11) = theta_ddot;
state_dot(12) = psi_ddot;
end
4. PID控制器设计 🎛️
现在我们来设计PID控制器,让无人机能够稳定飞行!
4.1 PID控制原理
PID控制器由三部分组成:
- 比例§:与当前误差成正比
- 积分(I):与误差的积分成正比,消除稳态误差
- 微分(D):与误差的变化率成正比,提供阻尼
PID控制器的输出公式为:
u
(
t
)
=
K
p
e
(
t
)
+
K
i
∫
e
(
t
)
d
t
+
K
d
d
e
(
t
)
d
t
u(t) = K_p e(t) + K_i \int e(t) \, dt + K_d \frac{de(t)}{dt}
u(t)=Kpe(t)+Ki∫e(t)dt+Kddtde(t)
4.2 实现PID控制器
创建一个函数文件pid_controller.m:
function [U, errors, integral_errors] = pid_controller(state, desired_state, ...
params, prev_errors, integral_errors)
% PID参数
Kp_z = 10; Ki_z = 2; Kd_z = 5; % 高度控制
Kp_phi = 8; Ki_phi = 0.5; Kd_phi = 3; % 横滚控制
Kp_theta = 8; Ki_theta = 0.5; Kd_theta = 3; % 俯仰控制
Kp_psi = 8; Ki_psi = 0.5; Kd_psi = 3; % 偏航控制
% 解包当前状态
z = state(3); z_dot = state(6);
phi = state(7); phi_dot = state(10);
theta = state(8); theta_dot = state(11);
psi = state(9); psi_dot = state(12);
% 解包期望状态
z_des = desired_state(3); z_dot_des = desired_state(6);
phi_des = desired_state(7); phi_dot_des = desired_state(10);
theta_des = desired_state(8); theta_dot_des = desired_state(11);
psi_des = desired_state(9); psi_dot_des = desired_state(12);
% 计算误差
errors = zeros(4,1);
errors(1) = z_des - z; % 高度误差
errors(2) = phi_des - phi; % 横滚误差
errors(3) = theta_des - theta; % 俯仰误差
errors(4) = psi_des - psi; % 偏航误差
% 计算误差导数
error_dots = (errors - prev_errors) / params.dt;
% 更新积分误差
integral_errors = integral_errors + errors * params.dt;
% 计算PID输出
U1 = Kp_z * errors(1) + Ki_z * integral_errors(1) + Kd_z * error_dots(1);
U2 = Kp_phi * errors(2) + Ki_phi * integral_errors(2) + Kd_phi * error_dots(2);
U3 = Kp_theta * errors(3) + Ki_theta * integral_errors(3) + Kd_theta * error_dots(3);
U4 = Kp_psi * errors(4) + Ki_psi * integral_errors(4) + Kd_psi * error_dots(4);
% 限制控制输入
U1 = max(min(U1, params.m*params.g*2), 0); % U1不能为负
U2 = max(min(U2, 5), -5);
U3 = max(min(U3, 5), -5);
U4 = max(min(U4, 5), -5);
U = [U1; U2; U3; U4];
end
5. 仿真主循环 🔄
现在我们把所有部分整合到一起,完成仿真主循环:
%% 初始化
state = initial_state;
states = zeros(length(t), length(state));
states(1,:) = state';
desired_state = [0; 0; 2; 0; 0; 0; 0; 0; 0; 0; 0; 0]; % 期望高度2米
% PID控制器初始化
prev_errors = zeros(4,1);
integral_errors = zeros(4,1);
%% 主仿真循环
for i = 1:length(t)-1
% 获取当前控制输入
[U, errors, integral_errors] = pid_controller(state, desired_state, ...
params, prev_errors, integral_errors);
prev_errors = errors;
% 使用ode45求解ODE
[~, temp_state] = ode45(@(t,state) quadcopter_ode(t, state, params, U), ...
[t(i) t(i+1)], state);
state = temp_state(end,:)';
% 存储状态
states(i+1,:) = state';
% 显示进度
if mod(i,100) == 0
fprintf('仿真进度: %.1f%%\n', i/length(t)*100);
end
end
fprintf('仿真完成!\n');
6. 结果可视化 📊
仿真完成后,我们需要可视化结果来评估控制器的性能:
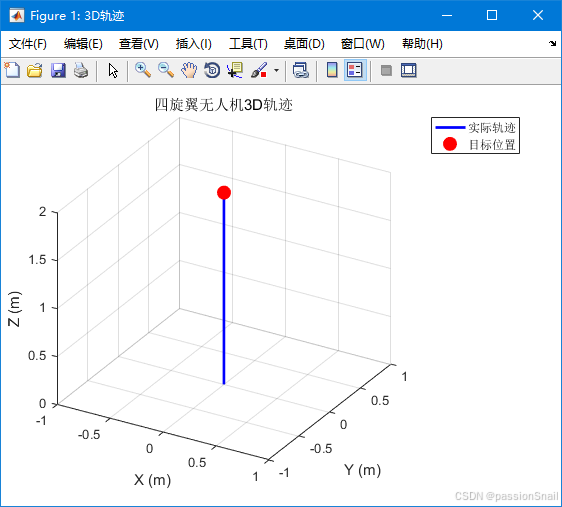
6.1 绘制3D轨迹
%% 3D轨迹图
figure('Name', '3D轨迹', 'Color', 'white');
plot3(states(:,1), states(:,2), states(:,3), 'b', 'LineWidth', 2);
hold on;
plot3(0, 0, desired_state(3), 'ro', 'MarkerSize', 10, 'MarkerFaceColor', 'r');
grid on;
xlabel('X (m)'); ylabel('Y (m)'); zlabel('Z (m)');
title('四旋翼无人机3D轨迹');
legend('实际轨迹', '目标位置');
view(30,30);
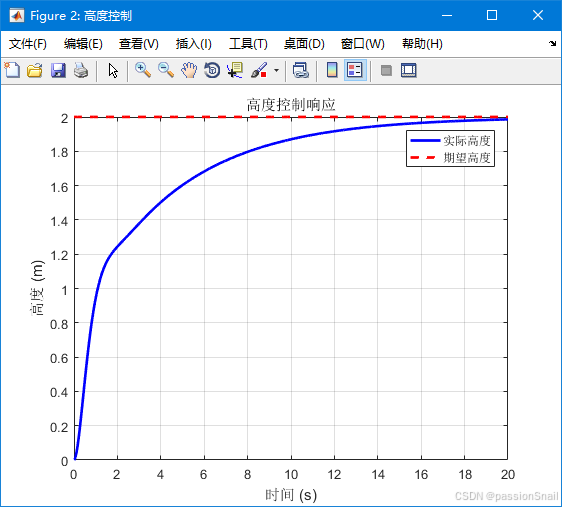
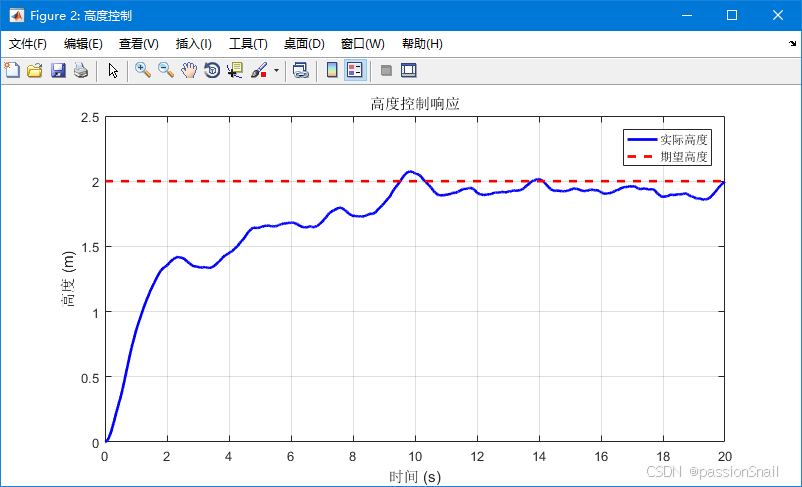
6.2 绘制高度变化曲线
%% 高度变化图
figure('Name', '高度控制', 'Color', 'white');
plot(t, states(:,3), 'b', 'LineWidth', 2);
hold on;
plot(t, desired_state(3)*ones(size(t)), 'r--', 'LineWidth', 2);
grid on;
xlabel('时间 (s)'); ylabel('高度 (m)');
title('高度控制响应');
legend('实际高度', '期望高度');
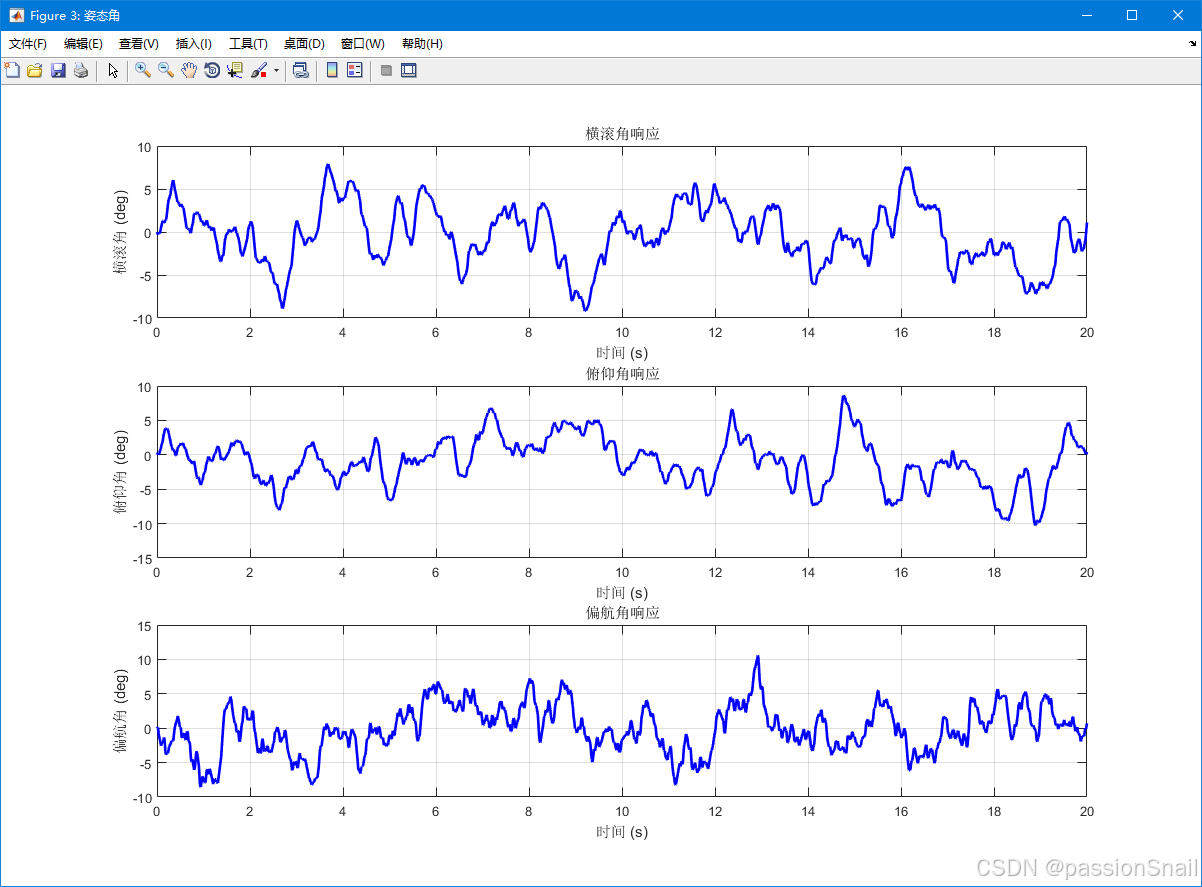
6.3 绘制姿态角变化
%% 姿态角变化图
figure('Name', '姿态角', 'Color', 'white', 'Position', [100 100 1200 800]);
subplot(3,1,1);
plot(t, rad2deg(states(:,7)), 'b', 'LineWidth', 2);
grid on;
xlabel('时间 (s)'); ylabel('横滚角 (deg)');
title('横滚角响应');
subplot(3,1,2);
plot(t, rad2deg(states(:,8)), 'b', 'LineWidth', 2);
grid on;
xlabel('时间 (s)'); ylabel('俯仰角 (deg)');
title('俯仰角响应');
subplot(3,1,3);
plot(t, rad2deg(states(:,9)), 'b', 'LineWidth', 2);
grid on;
xlabel('时间 (s)'); ylabel('偏航角 (deg)');
title('偏航角响应');
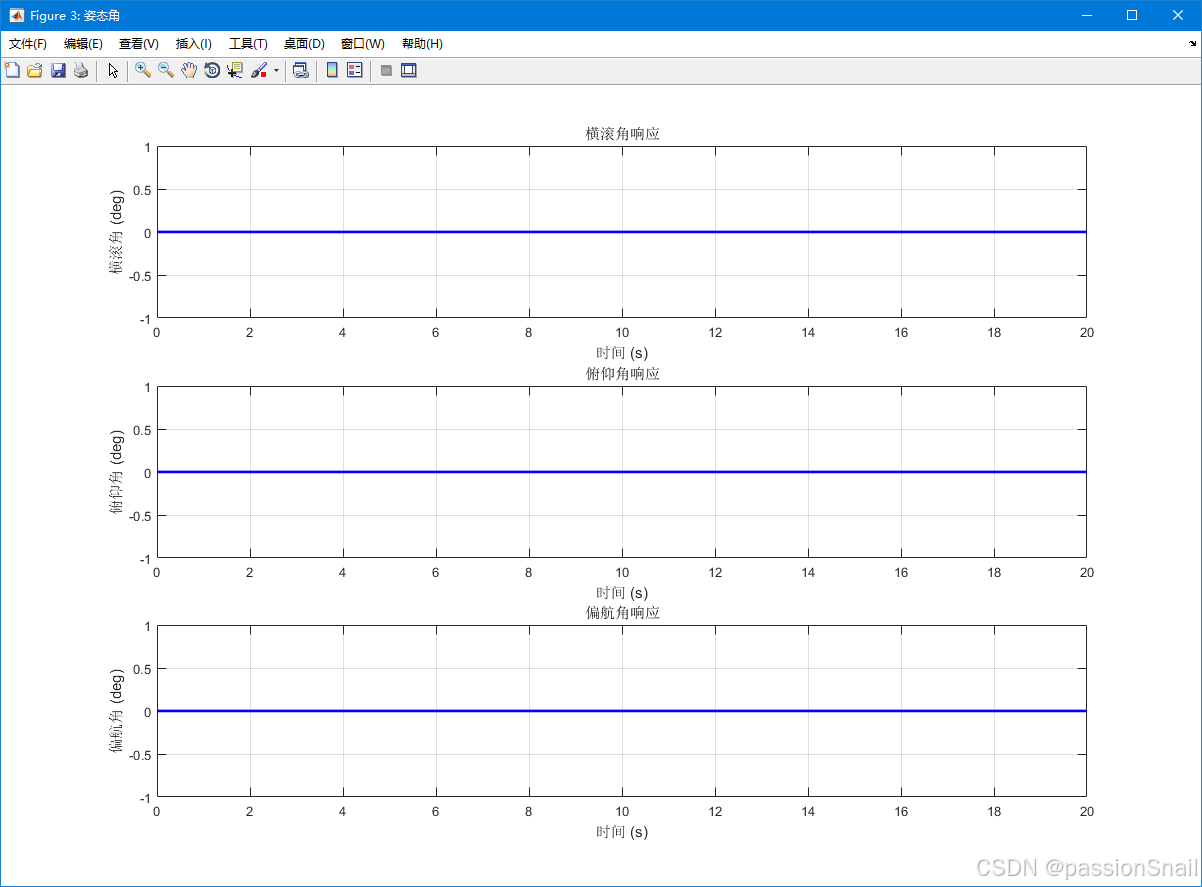
由上面三张图可以发现,这些轨迹比较理想,然而实际情况中比这会复杂很多,比如风的作用、传感器产生噪声数据等等,别急,我们继续往下看。
7. 参数调优技巧 🛠️
PID控制器的性能很大程度上取决于参数的选取。这里分享一些调参技巧:
7.1 调参步骤
- 先调P:将I和D设为0,逐渐增大P直到系统开始振荡
- 再调D:增加D来抑制振荡,使系统稳定
- 最后调I:如果需要消除稳态误差,适当增加I
7.2 Ziegler-Nichols方法
这是一种经典的PID参数整定方法:
- 先设Ki=Kd=0
- 增加Kp直到系统开始等幅振荡,记录此时的Kp=Ku和振荡周期Tu
- 根据下表设置PID参数:
| 控制器类型 | Kp | Ti | Td |
|---|---|---|---|
| P | 0.5Ku | - | - |
| PI | 0.45Ku | 0.83Tu | - |
| PID | 0.6Ku | 0.5Tu | 0.125Tu |
7.3 我们的参数建议
对于四旋翼无人机,以下参数可以作为起点:
% 高度控制
Kp_z = 10; Ki_z = 2; Kd_z = 5;
% 姿态控制
Kp_angle = 8; Ki_angle = 0.5; Kd_angle = 3;
8. 进阶内容:添加风扰和噪声 🌬️
为了让仿真更接近现实,我们可以添加一些环境干扰:
8.1 修改ODE函数添加风扰
function state_dot = quadcopter_ode(t, state, params, U)
% ... (之前的代码保持不变)
% 添加随机风扰 (在x和y方向)
wind_gain = 0.2; % 风扰强度
if t > 5 % 5秒后开始添加风扰
x_ddot = x_ddot + wind_gain*randn();
y_ddot = y_ddot + wind_gain*randn();
end
% ... (其余代码保持不变)
end
8.2 添加传感器噪声
在控制器中模拟传感器噪声:
function [U, errors, integral_errors] = pid_controller(state, desired_state, ...
params, prev_errors, integral_errors)
% 添加传感器噪声
noise_gain = 0.02;
state(3) = state(3) + noise_gain*randn(); % 高度噪声
state(7:9) = state(7:9) + noise_gain*randn(3,1); % 姿态角噪声
% ... (其余代码保持不变)
end
9. 完整代码整合 🏗️
为了便于使用,这里提供完整的整合代码。创建一个名为quadcopter_sim.m的文件:
% 四旋翼无人机PID控制仿真 - 完整代码
% 作者: MATLAB技术大本营
% 日期: 2023年
% 版本: MATLAB 2016b
function quadcopter_sim()
%% 初始化参数
clear all; close all; clc;
% 无人机物理参数
params.m = 1.2; % 质量(kg)
params.g = 9.81; % 重力加速度(m/s^2)
params.l = 0.25; % 电机到质心的距离(m)
% 转动惯量(kg·m^2)
params.Ixx = 0.0234;
params.Iyy = 0.0234;
params.Izz = 0.0468;
params.c = 0.01; % 反扭矩系数
params.k = 1.2e-5; % 升力系数
params.b = 1e-6; % 阻力系数
% 仿真参数
tspan = [0 20]; % 仿真时间范围
params.dt = 0.01; % 时间步长(s)
t = tspan(1):params.dt:tspan(2);
% 初始状态 [x y z x_dot y_dot z_dot phi theta psi phi_dot theta_dot psi_dot]
initial_state = zeros(12,1);
% 期望状态 [x y z x_dot y_dot z_dot phi theta psi phi_dot theta_dot psi_dot]
desired_state = [0; 0; 2; 0; 0; 0; 0; 0; 0; 0; 0; 0]; % 期望高度2米
%% 初始化仿真
state = initial_state;
states = zeros(length(t), length(state));
states(1,:) = state';
% PID控制器初始化
prev_errors = zeros(4,1);
integral_errors = zeros(4,1);
%% 主仿真循环
for i = 1:length(t)-1
% 获取当前控制输入
[U, errors, integral_errors] = pid_controller(state, desired_state, ...
params, prev_errors, integral_errors);
prev_errors = errors;
% 使用ode45求解ODE
[~, temp_state] = ode45(@(t,state) quadcopter_ode(t, state, params, U), ...
[t(i) t(i+1)], state);
state = temp_state(end,:)';
% 存储状态
states(i+1,:) = state';
% 显示进度
if mod(i,100) == 0
fprintf('仿真进度: %.1f%%\n', i/length(t)*100);
end
end
fprintf('仿真完成!\n');
%% 可视化结果
plot_results(t, states, desired_state);
end
function state_dot = quadcopter_ode(t, state, params, U)
% 解包状态变量
x = state(1); y = state(2); z = state(3);
x_dot = state(4); y_dot = state(5); z_dot = state(6);
phi = state(7); theta = state(8); psi = state(9);
phi_dot = state(10); theta_dot = state(11); psi_dot = state(12);
% 解包控制输入
U1 = U(1); U2 = U(2); U3 = U(3); U4 = U(4);
% 平移加速度
x_ddot = (sin(psi)*sin(phi) + cos(psi)*sin(theta)*cos(phi)) * U1 / params.m;
y_ddot = (-cos(psi)*sin(phi) + sin(psi)*sin(theta)*cos(phi)) * U1 / params.m;
z_ddot = -params.g + (cos(theta)*cos(phi)) * U1 / params.m;
% 添加随机风扰 (在x和y方向)
wind_gain = 0.2; % 风扰强度
if t > 5 % 5秒后开始添加风扰
x_ddot = x_ddot + wind_gain*randn();
y_ddot = y_ddot + wind_gain*randn();
end
% 旋转加速度
phi_ddot = theta_dot*psi_dot*(params.Iyy-params.Izz)/params.Ixx + params.l*U2/params.Ixx;
theta_ddot = phi_dot*psi_dot*(params.Izz-params.Ixx)/params.Iyy + params.l*U3/params.Iyy;
psi_ddot = phi_dot*theta_dot*(params.Ixx-params.Iyy)/params.Izz + U4/params.Izz;
% 组装状态导数
state_dot = zeros(12,1);
state_dot(1) = x_dot;
state_dot(2) = y_dot;
state_dot(3) = z_dot;
state_dot(4) = x_ddot;
state_dot(5) = y_ddot;
state_dot(6) = z_ddot;
state_dot(7) = phi_dot;
state_dot(8) = theta_dot;
state_dot(9) = psi_dot;
state_dot(10) = phi_ddot;
state_dot(11) = theta_ddot;
state_dot(12) = psi_ddot;
end
function [U, errors, integral_errors] = pid_controller(state, desired_state, ...
params, prev_errors, integral_errors)
% PID参数
Kp_z = 10; Ki_z = 2; Kd_z = 5; % 高度控制
Kp_phi = 8; Ki_phi = 0.5; Kd_phi = 3; % 横滚控制
Kp_theta = 8; Ki_theta = 0.5; Kd_theta = 3; % 俯仰控制
Kp_psi = 8; Ki_psi = 0.5; Kd_psi = 3; % 偏航控制
% 添加传感器噪声
noise_gain = 0.02;
state(3) = state(3) + noise_gain*randn(); % 高度噪声
state(7:9) = state(7:9) + noise_gain*randn(3,1); % 姿态角噪声
% 解包当前状态
z = state(3); z_dot = state(6);
phi = state(7); phi_dot = state(10);
theta = state(8); theta_dot = state(11);
psi = state(9); psi_dot = state(12);
% 解包期望状态
z_des = desired_state(3); z_dot_des = desired_state(6);
phi_des = desired_state(7); phi_dot_des = desired_state(10);
theta_des = desired_state(8); theta_dot_des = desired_state(11);
psi_des = desired_state(9); psi_dot_des = desired_state(12);
% 计算误差
errors = zeros(4,1);
errors(1) = z_des - z; % 高度误差
errors(2) = phi_des - phi; % 横滚误差
errors(3) = theta_des - theta; % 俯仰误差
errors(4) = psi_des - psi; % 偏航误差
% 计算误差导数
error_dots = (errors - prev_errors) / params.dt;
% 更新积分误差
integral_errors = integral_errors + errors * params.dt;
% 计算PID输出
U1 = Kp_z * errors(1) + Ki_z * integral_errors(1) + Kd_z * error_dots(1);
U2 = Kp_phi * errors(2) + Ki_phi * integral_errors(2) + Kd_phi * error_dots(2);
U3 = Kp_theta * errors(3) + Ki_theta * integral_errors(3) + Kd_theta * error_dots(3);
U4 = Kp_psi * errors(4) + Ki_psi * integral_errors(4) + Kd_psi * error_dots(4);
% 限制控制输入
U1 = max(min(U1, params.m*params.g*2), 0); % U1不能为负
U2 = max(min(U2, 5), -5);
U3 = max(min(U3, 5), -5);
U4 = max(min(U4, 5), -5);
U = [U1; U2; U3; U4];
end
function plot_results(t, states, desired_state)
%% 3D轨迹图
figure('Name', '3D轨迹', 'Color', 'white', 'Position', [100 100 800 600]);
plot3(states(:,1), states(:,2), states(:,3), 'b', 'LineWidth', 2);
hold on;
plot3(0, 0, desired_state(3), 'ro', 'MarkerSize', 10, 'MarkerFaceColor', 'r');
grid on;
xlabel('X (m)'); ylabel('Y (m)'); zlabel('Z (m)');
title('四旋翼无人机3D轨迹');
legend('实际轨迹', '目标位置');
view(30,30);
%% 高度变化图
figure('Name', '高度控制', 'Color', 'white', 'Position', [200 200 800 400]);
plot(t, states(:,3), 'b', 'LineWidth', 2);
hold on;
plot(t, desired_state(3)*ones(size(t)), 'r--', 'LineWidth', 2);
grid on;
xlabel('时间 (s)'); ylabel('高度 (m)');
title('高度控制响应');
legend('实际高度', '期望高度');
%% 姿态角变化图
figure('Name', '姿态角', 'Color', 'white', 'Position', [300 300 1200 800]);
subplot(3,1,1);
plot(t, rad2deg(states(:,7)), 'b', 'LineWidth', 2);
grid on;
xlabel('时间 (s)'); ylabel('横滚角 (deg)');
title('横滚角响应');
subplot(3,1,2);
plot(t, rad2deg(states(:,8)), 'b', 'LineWidth', 2);
grid on;
xlabel('时间 (s)'); ylabel('俯仰角 (deg)');
title('俯仰角响应');
subplot(3,1,3);
plot(t, rad2deg(states(:,9)), 'b', 'LineWidth', 2);
grid on;
xlabel('时间 (s)'); ylabel('偏航角 (deg)');
title('偏航角响应');
end
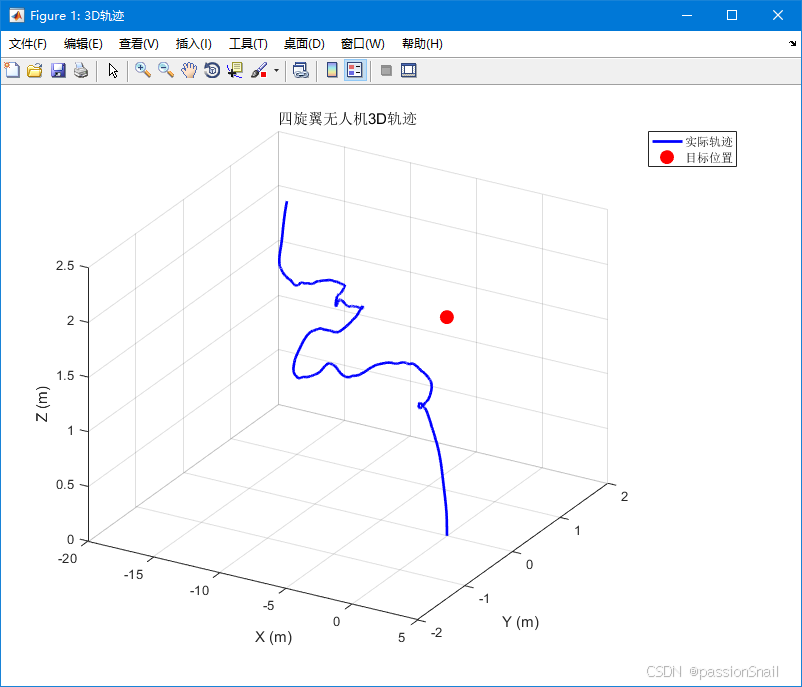
以下是添加风扰和传感器噪声之后的效果,我们会发现轨迹图确实更贴合实际效果一些呢~
3D轨迹图
高度变化图
姿态角变化图
10. 总结与展望 🎯
恭喜你完成了这个四旋翼无人机PID控制的MATLAB仿真!🎉 通过这个项目,我们学到了:
- 四旋翼无人机的动力学建模
- PID控制器的原理与实现
- MATLAB仿真环境的搭建
- 控制参数的调优方法
- 如何处理现实中的干扰和噪声
未来改进方向
这只是一个起点,你还可以考虑以下扩展:
- 实现轨迹跟踪:让无人机跟随特定路径飞行
- 添加图像识别:结合计算机视觉实现目标跟踪
- 改用更先进的控制算法:如LQR、MPC或神经网络控制
- 硬件在环仿真:连接实际飞控硬件进行测试
希望这篇教程对你有所帮助!如果有任何问题或建议,欢迎留言讨论。Happy coding! 🚀



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











