







ROS安装 + vscode简单配置
假设你已经安装好了Ubuntu 20.04,并且只有国内网络环境。
换源
-
Ctrl + Alt + T打开终端 -
备份并打开
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak sudo gedit /etc/apt/sources.list -
复制一下内容,替换默认的源
#添加阿里源 deb http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse deb http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiverse deb http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiverse deb http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe multiverse deb http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse deb-src http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse #添加清华源 deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-backports main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-backports main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-security main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-security main restricted universe multiverse multiverse -
更新源
sudo apt-get update -
如出现错误信息,则输入依次
sudo apt-get -f install sudo apt-get upgrade
安装ROS
-
添加 sources.list(设置你的电脑可以从 packages.ros.org 接收软件.)
sudo sh -c '. /etc/lsb-release && echo "d{2d3b390d-f615-41d0-a830-7bbdcedbd397}eb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' -
添加 keys
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 -
更新源
sudo apt-get update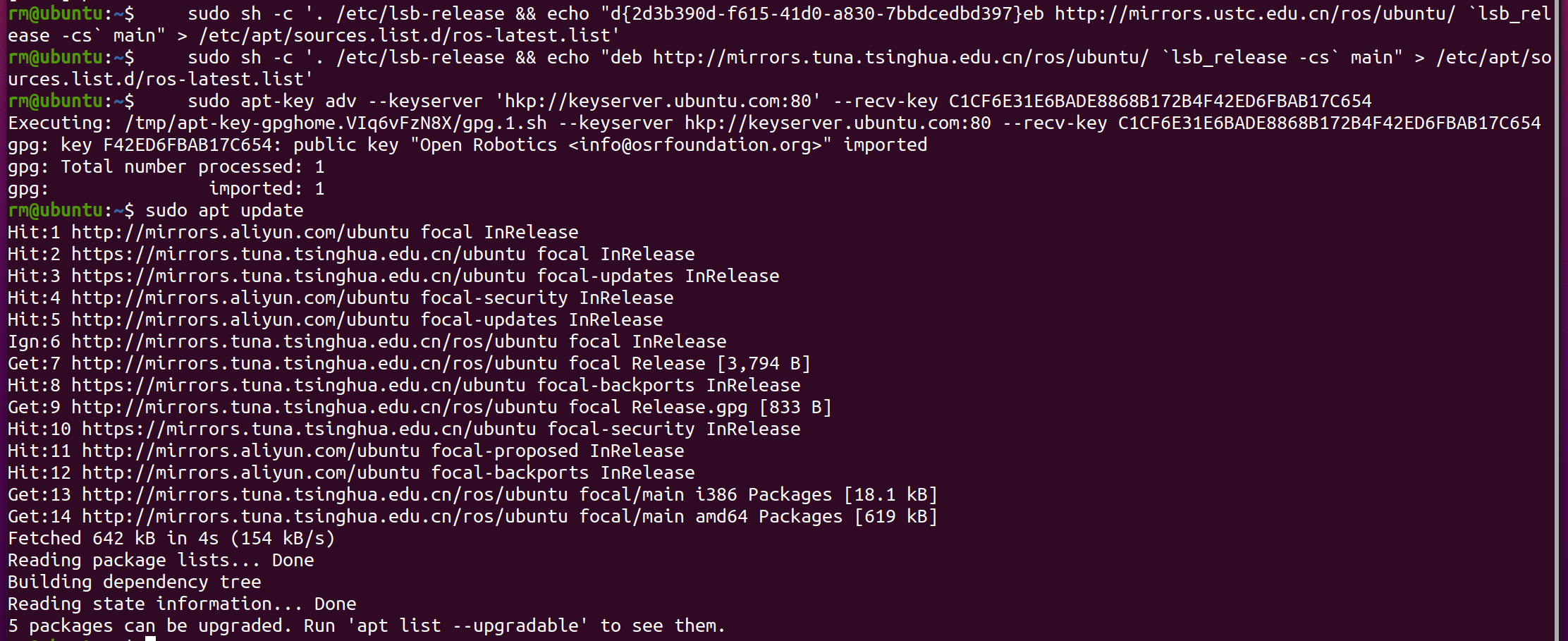
-
安装ROS Noetic
sudo apt install ros-noetic-desktop-full-
如果安装过程出现:E: Failed to fetch
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-noetic-topic-tools/ros-noetic-topic-tools_1.15.13-1focal.20210922.182212_amd64.deb Undetermined Error [IP: 101.6.15.130 80]则输入
sudo apt-get update --fix-missing sudo apt install ros-noetic-desktop-full
-
-
耐心等待安装完成
-
设置系统环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc
测试
运行海龟仿真
在三个Terminal中分别执行
roscorerosrun turtlesim turtlesim_noderosrun turtlesim turtle_teleop_key
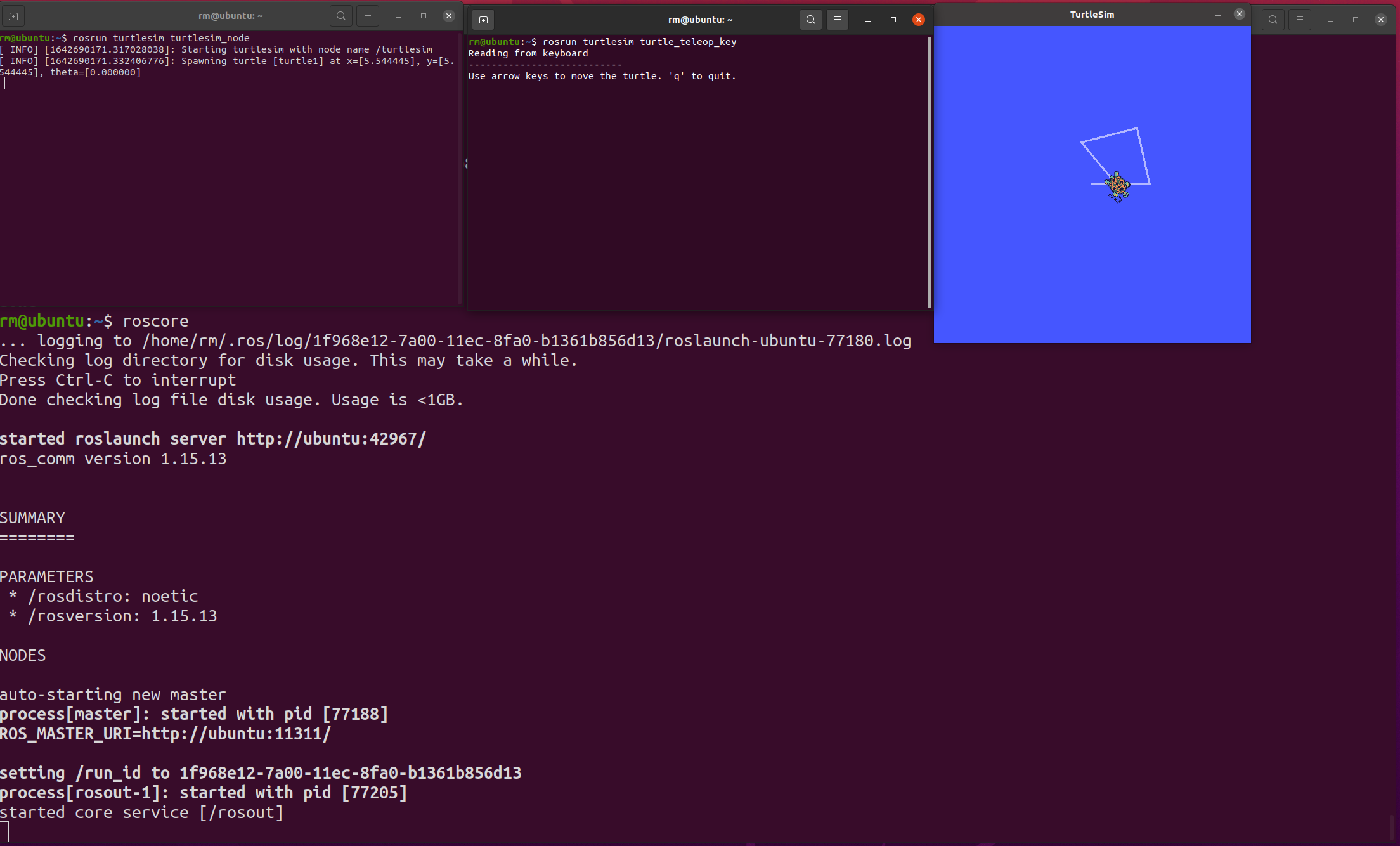
成功安装!
配置vscode
-
在vscode官网下载.deb安装包,选择保存文件。
-
在安装包所在目录打开终端
-
执行
sudo dpkg -i 安装包名字.deb -
终端输入
code,打开vscode -
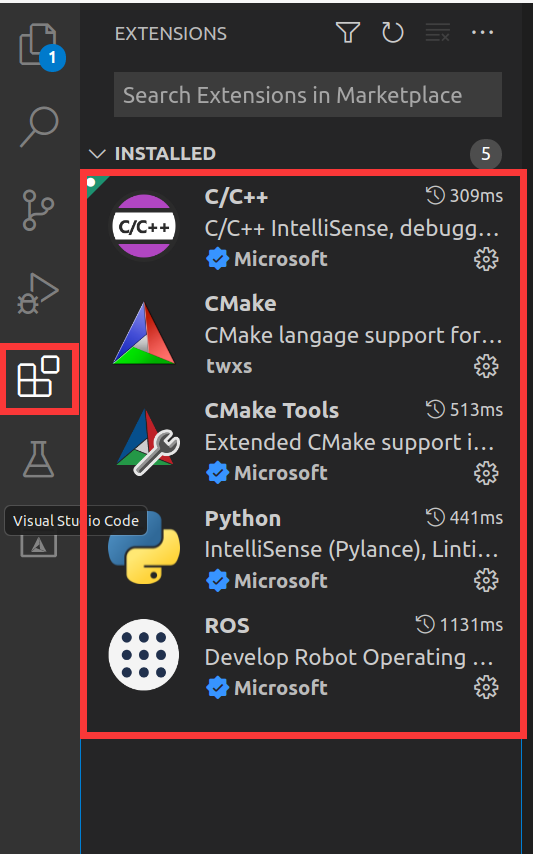
安装如图插件
-
重启vscode
-
配置c++ ROS库
-
mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src catkin_init_workspace cd .. catkin_make catkin_make -DCMAKE_EXPORT_COMPILE_COMMANDS=Yes code . -
在/src下新建
test.cpp#include <bits/stdc++ using namespace std; #include "ros/ros.h" #include "std_msgs/String.h" int main(int argc, char** argv) { ros::init(argc, argv, "talker"); ros::NodeHandle n; ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000); ros::Rate loop_rate(10); int count = 0; while(ros::ok()) { std_msgs::String msg; std::stringstream ss; ss << "hello world " << count; msg.data = ss.str(); ROS_INFO("%s", msg.data.c_str()); chatter_pub.publish(msg); ros::spinOnce(); loop_rate.sleep(); count++; } return 0; } -
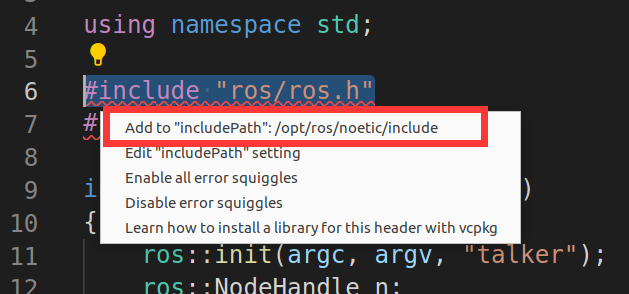
此时,在
#include "ros/ros.h"处有红色波浪线报错。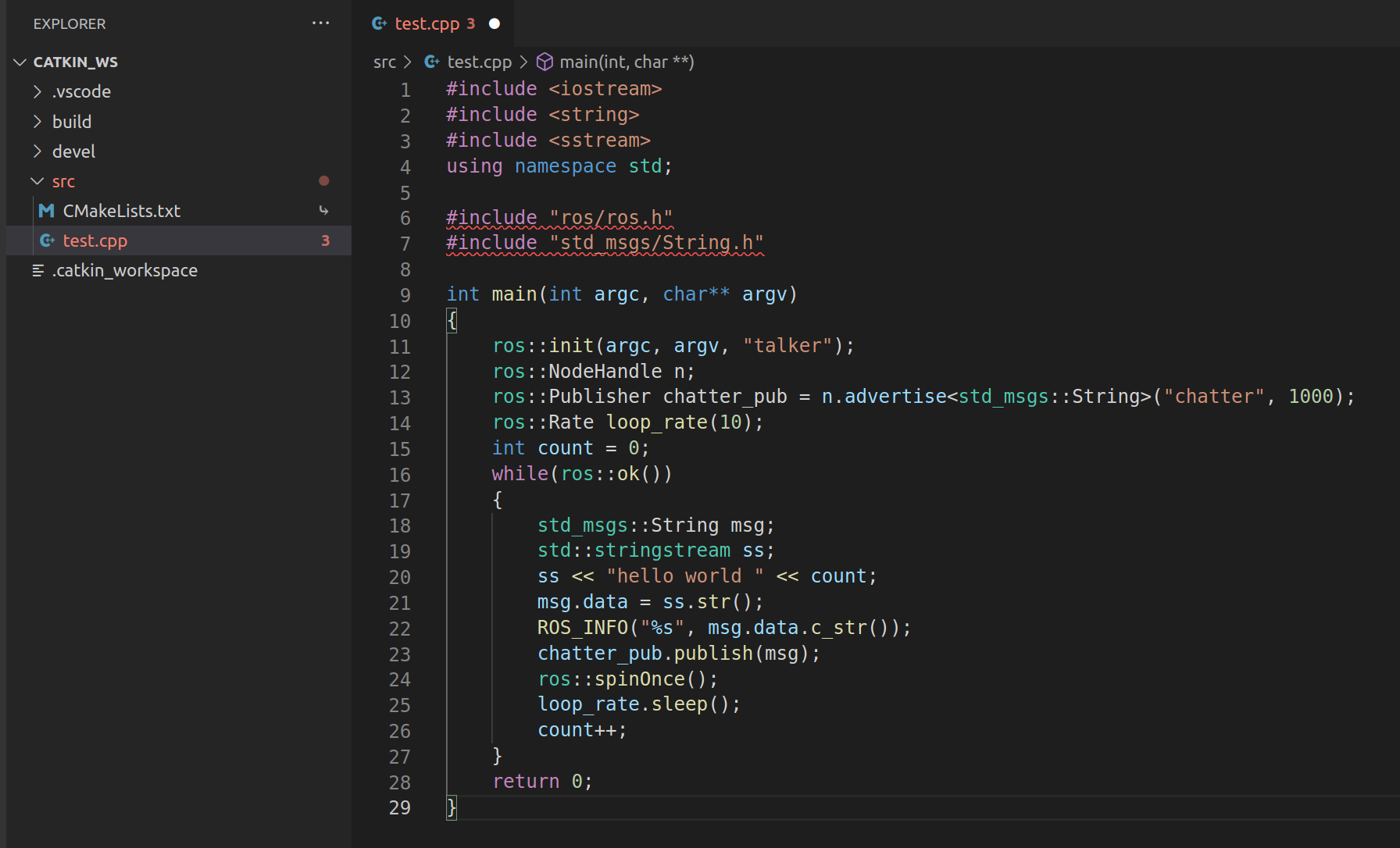
-
在黄色灯泡处点击“Add to”即可。
-
若无提示,则点击
Edit “includePath” setting。并使其自动创建配置文件。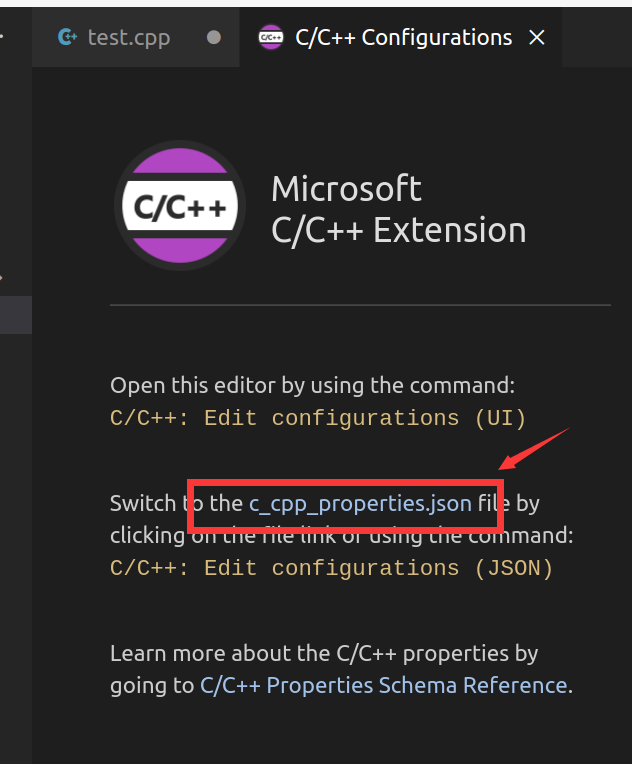
-
在配置项目中添加
"compileCommands": "${workspaceFolder}/build/compile_commands.json"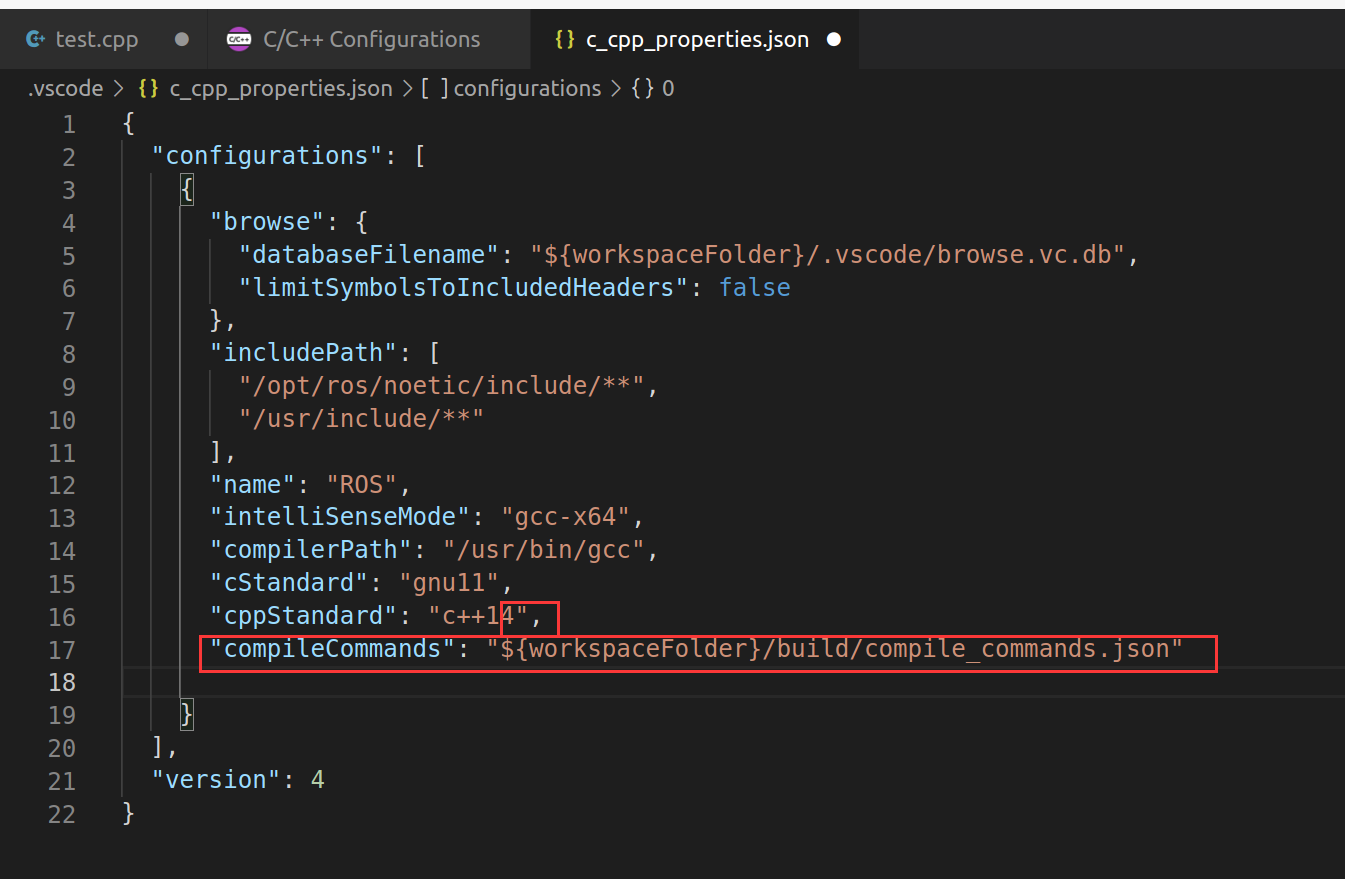
-
全部保存后重启,红色波浪线消失,可以使用自动补全写代码了。
参考资料:


















 552
552

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











