






YOLOv9请移步
基于yolov9的路面裂缝检测数据集训练模型对比
YOLOv11请移步
基于yolov11的路面裂缝检测数据集训练模型对比
1.引言
目标检测是计算机视觉领域的核心任务之一,而YOLO(You Only Look Once)框架因其高效性与准确性成为该领域的代表性算法。自Redmon等人于2016年提出YOLOv1以来[1],该系列通过多尺度预测、特征金字塔网络等技术持续优化,在保持实时性的同时显著提升检测精度。作为单阶段检测器,YOLO通过端到端架构将目标定位与分类统一,在自动驾驶、工业质检等领域获得广泛应用。其设计思想对轻量化模型开发具有重要参考价值。
2.YOLOv10概述
YOLOv10是由清华大学研究团队提出的实时目标检测框架,通过消除非极大值抑制(NMS)依赖和优化模型架构实现了端到端检测能力。其核心技术包括一致双重分配策略(训练时一对多匹配提供丰富监督,推理时一对一匹配避免冗余预测)[2],以及效率-精度协同优化设计(轻量级分类头、空间-通道解耦下采样、大核卷积等)[3]。该框架提供YOLOv10n/s/m/l/x五种变体,在COCO数据集上,YOLOv10-S比RT-DETR-R18快1.8倍且参数减少2.8倍,YOLOv10-B相比YOLOv9-C延迟降低46%[4],适用于自动驾驶、工业检测等实时场景。
3.实验设计
本文将对比YOLOv10中YOLOv10-n、YOLOv10-s、YOLOv10-l与YOLOv10-x四个参数模型在同一数据集与同样轮数下的性能表现。选择的数据集为河北工业大学开源,发表在Data in Brief期刊中的UAV-PDD2023数据集,其用于道路破损检测[5-6]。数据集包含2440张三通道JPG格式图像,以及对应的VOC格式标注文件,图像规格为2592×1944,图像中标记了六种类型。
表1 模型训练参数
| YOLOv10-n | YOLOv10-s | YOLOv10-l | YOLOv10-x | |
|---|---|---|---|---|
| 训练轮数(epochs) | 300 | 300 | 300 | 300 |
| 超参数(hyp) | YOLOv11 default | YOLOv11 default | YOLOv11 default | YOLOv11 default |
| 权重模型 | yolo10n.pt | yolo10s.pt | yolo10l.pt | yolo10x.pt |
| 模型大小 | 5.5MB | 15.7MB | 49.7MB | 61.1MB |
4.实验结果
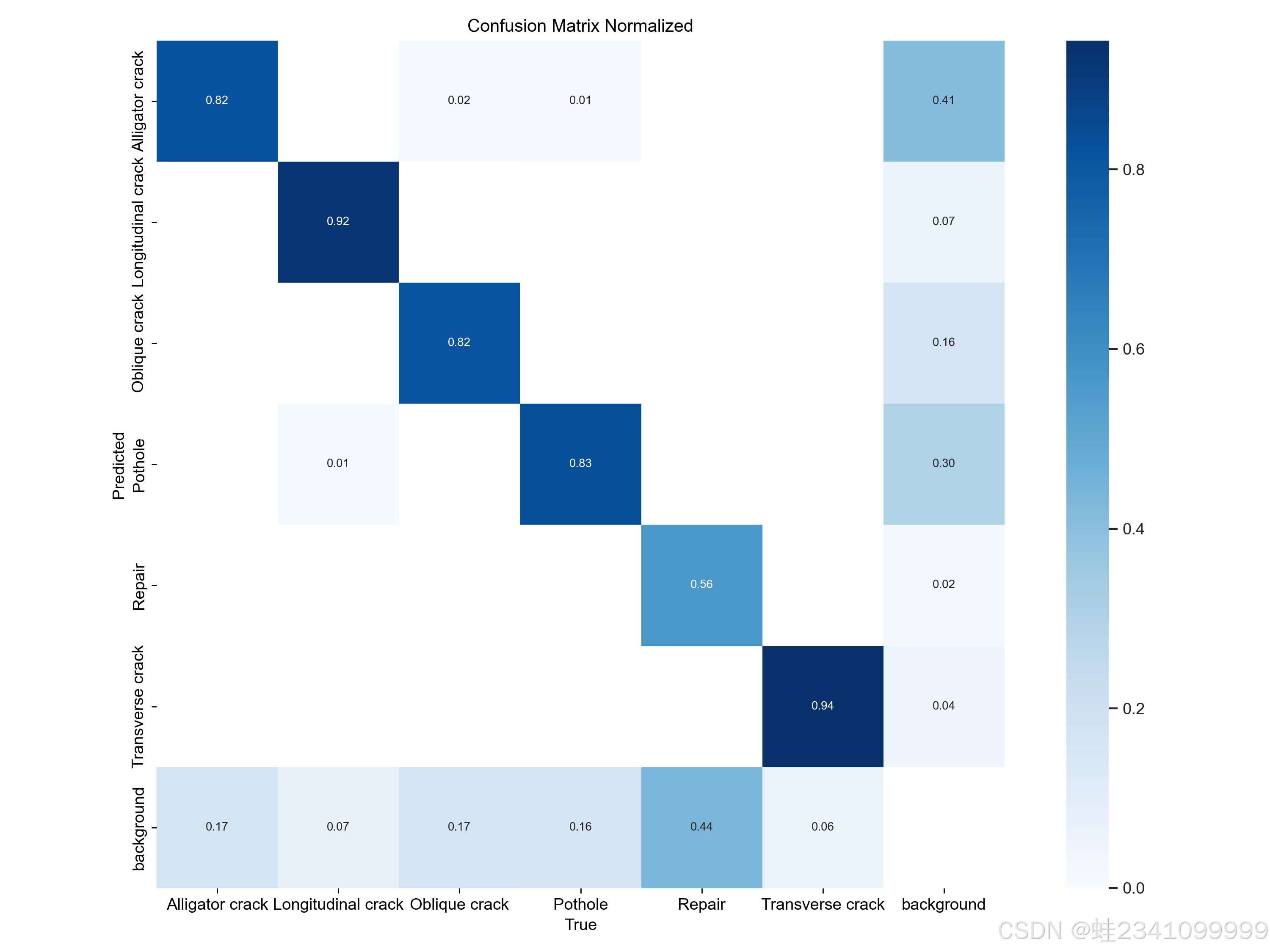
1.yolov10-n的混淆矩阵
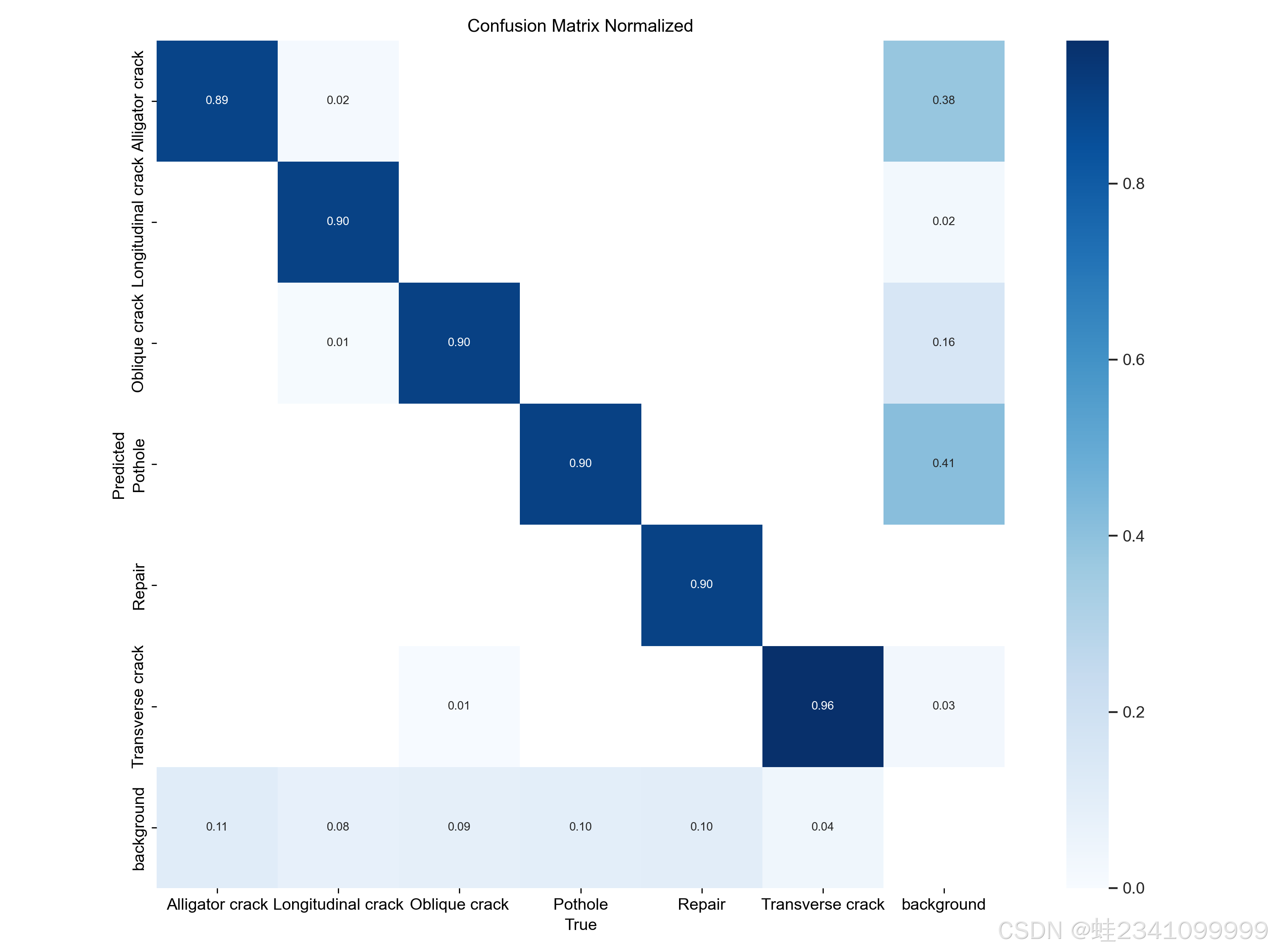
2.yolov10-s的混淆矩阵
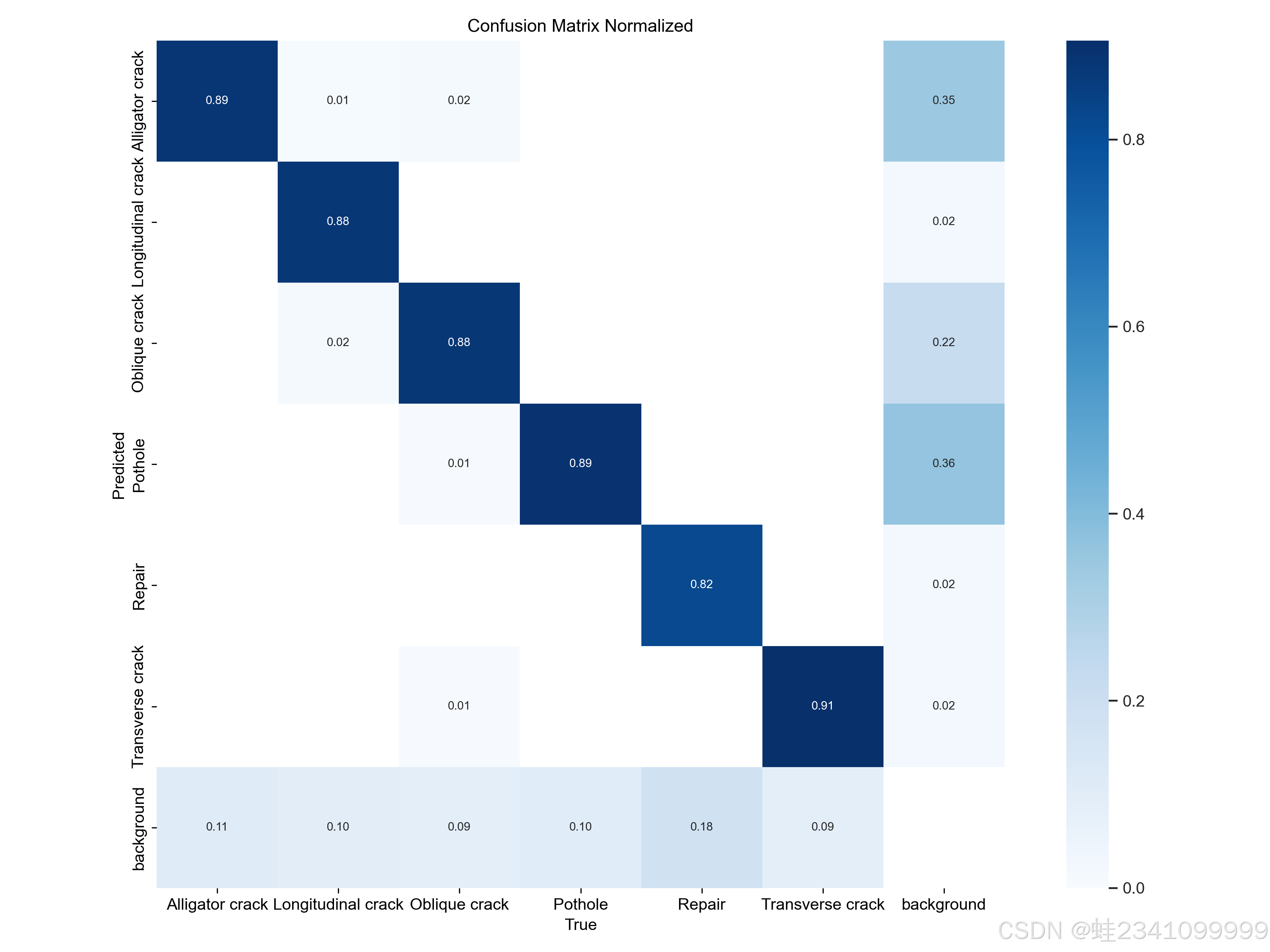
3.yolov10-l的混淆矩阵
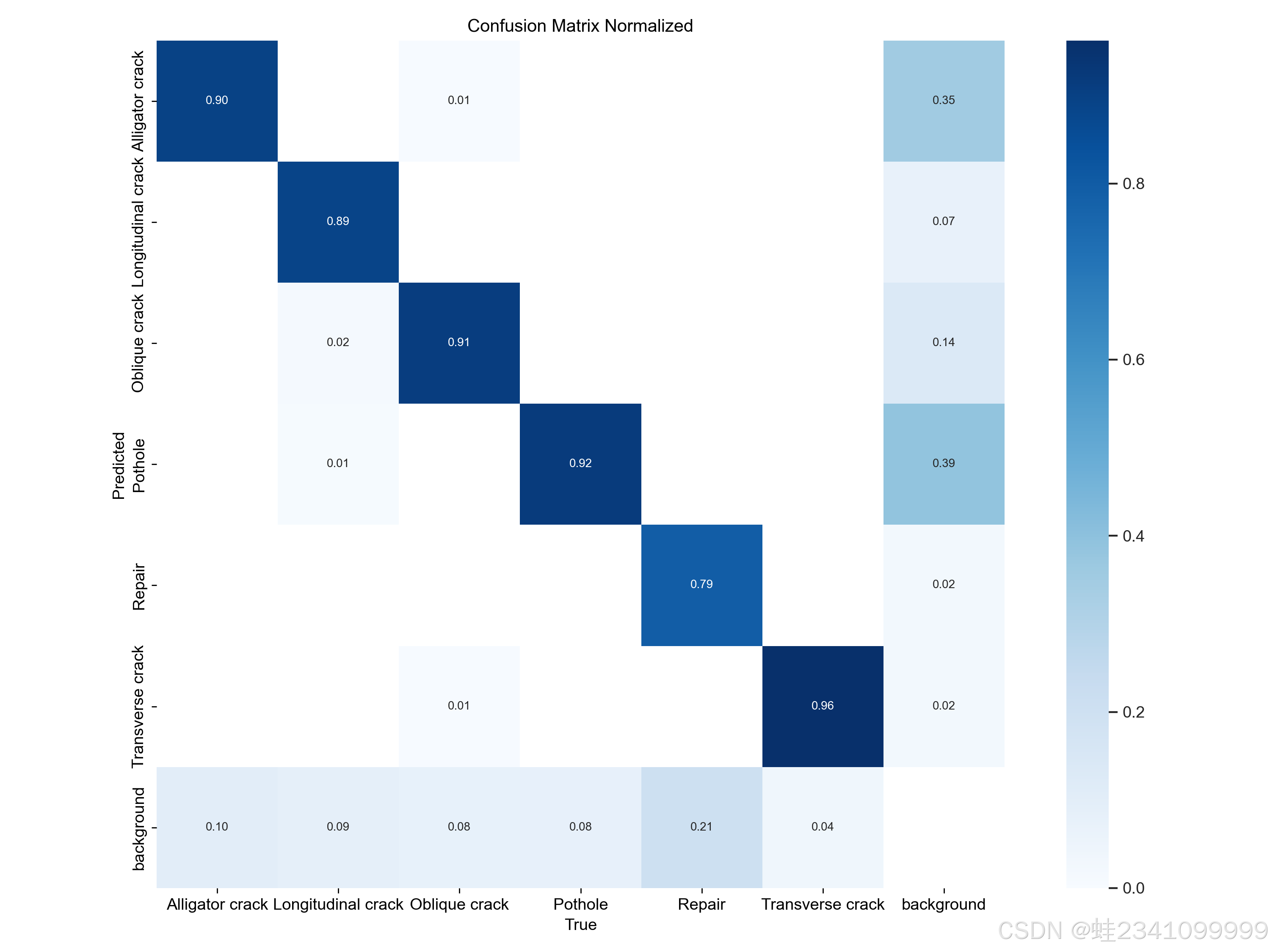
4.yolov10-x的混淆矩阵
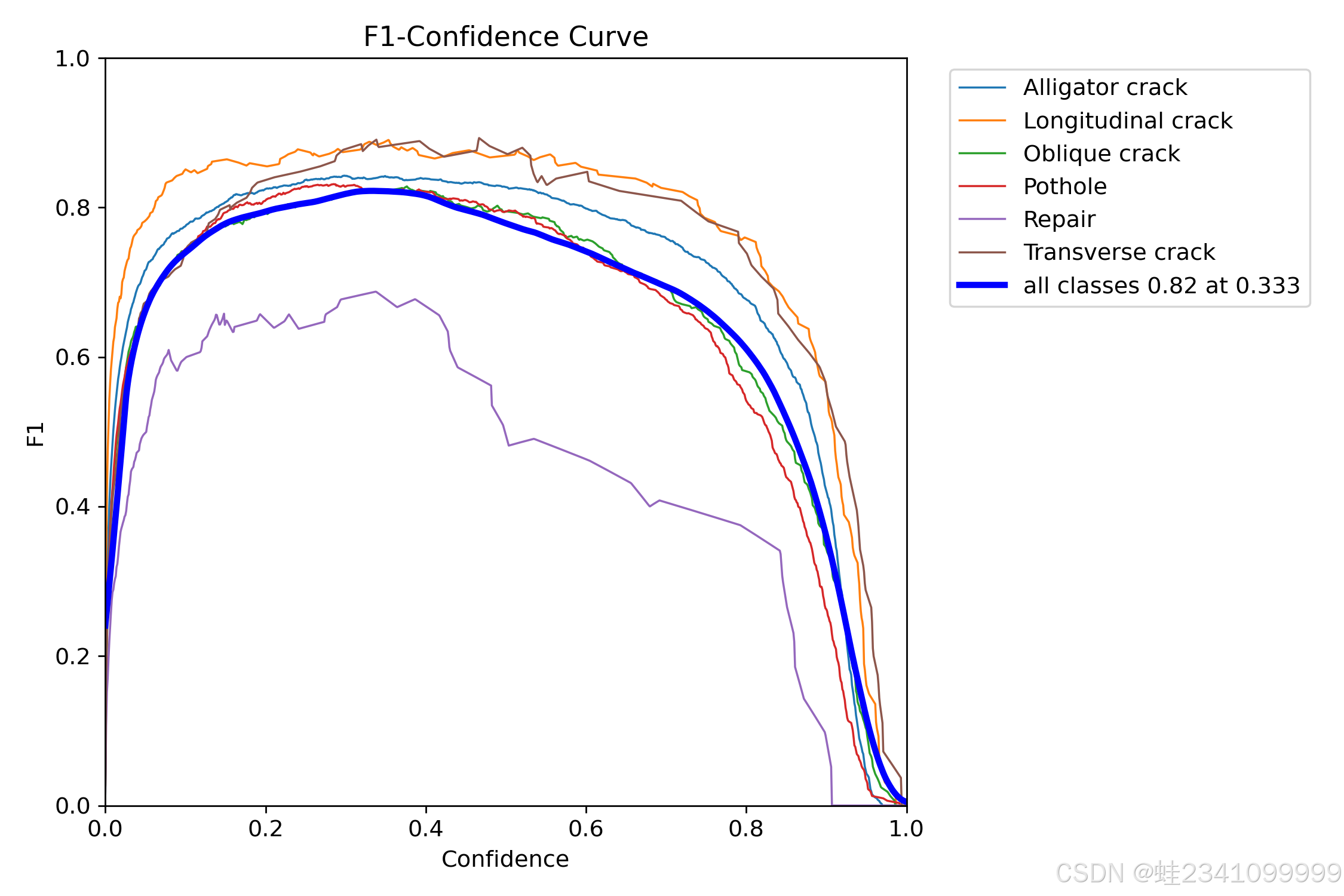
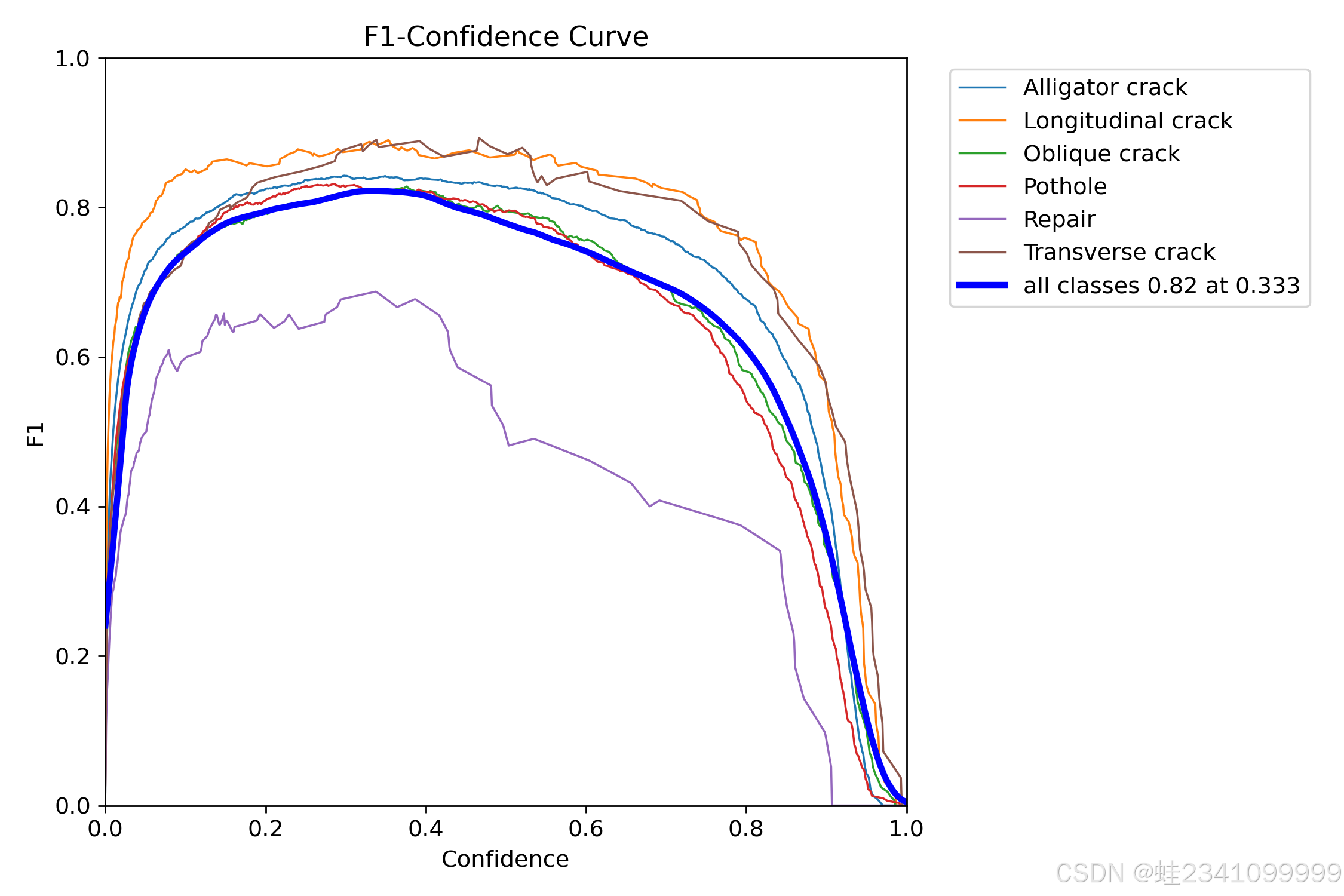
5.yolov10-n的F1值曲线
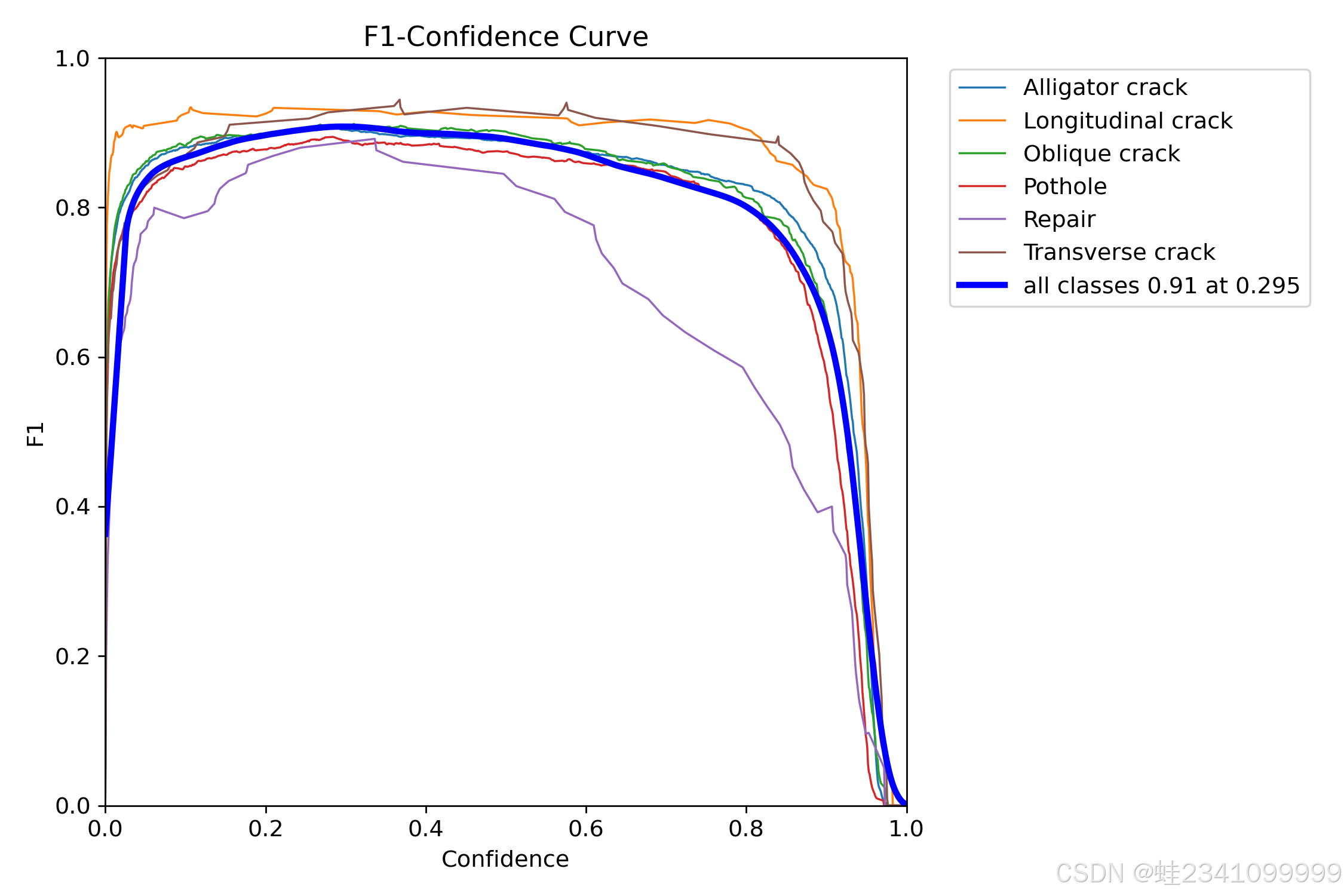
6.yolov10-s的F1值曲线
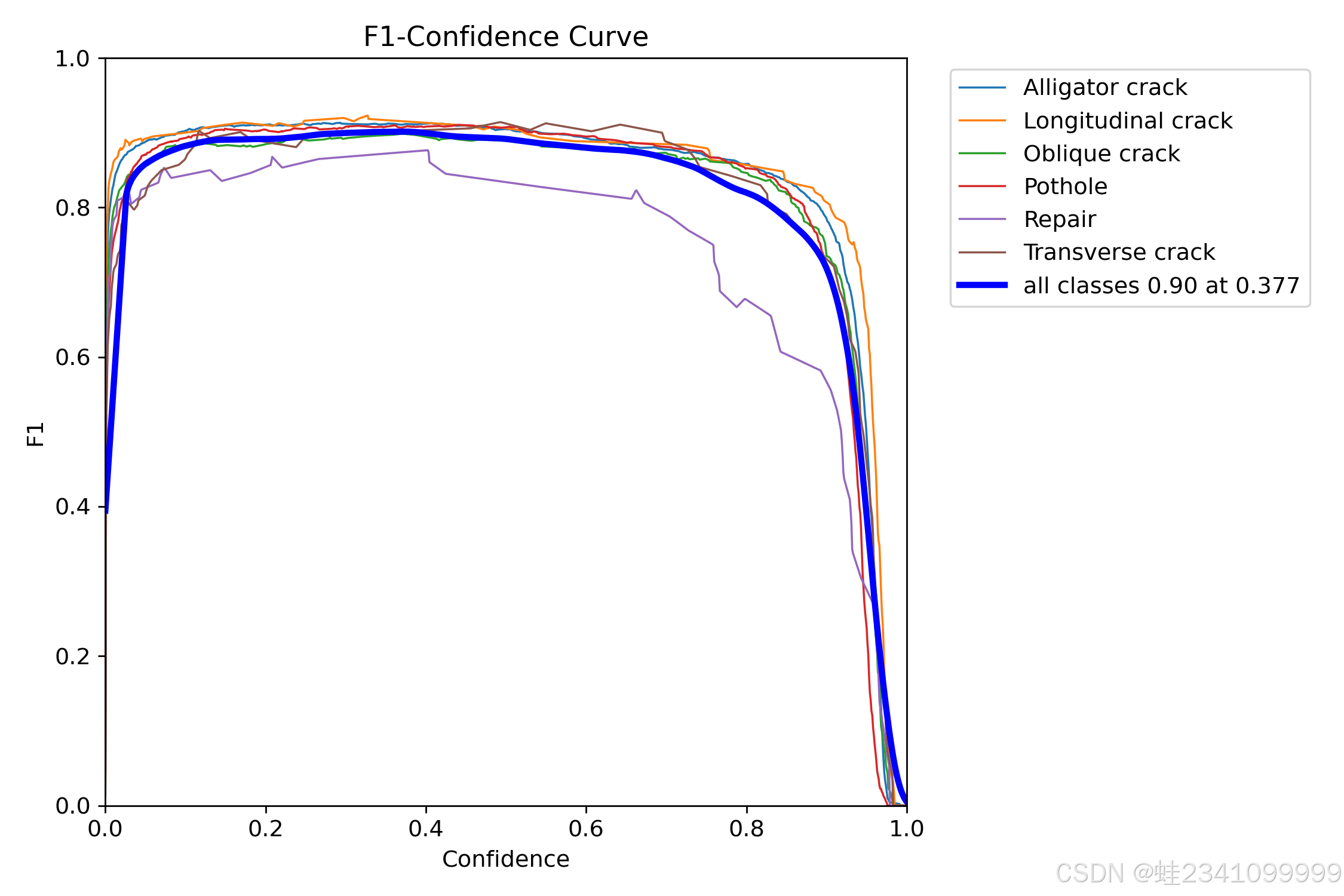
7.yolov10-l的F1值曲线
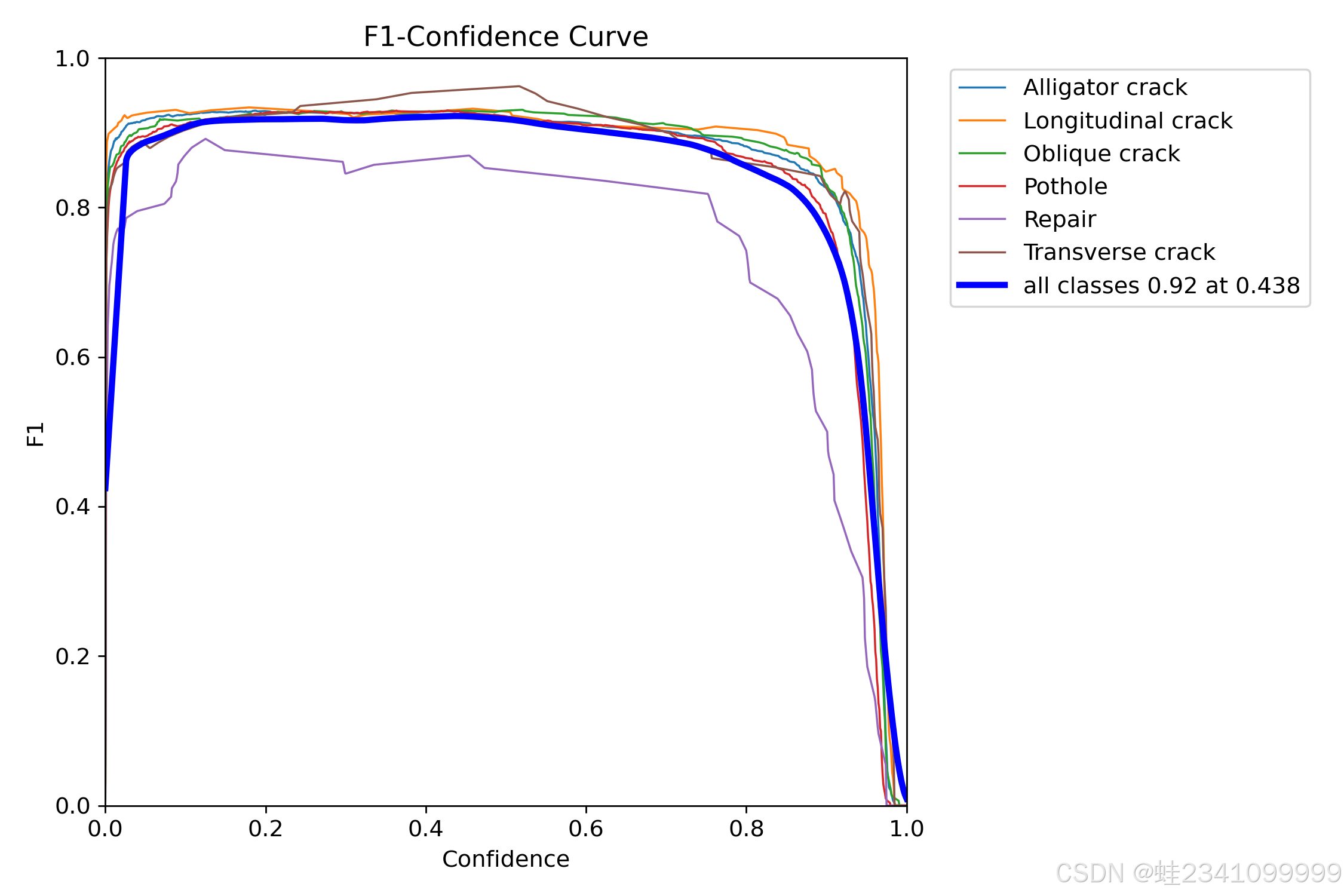
8.yolov10-x的F1值曲线
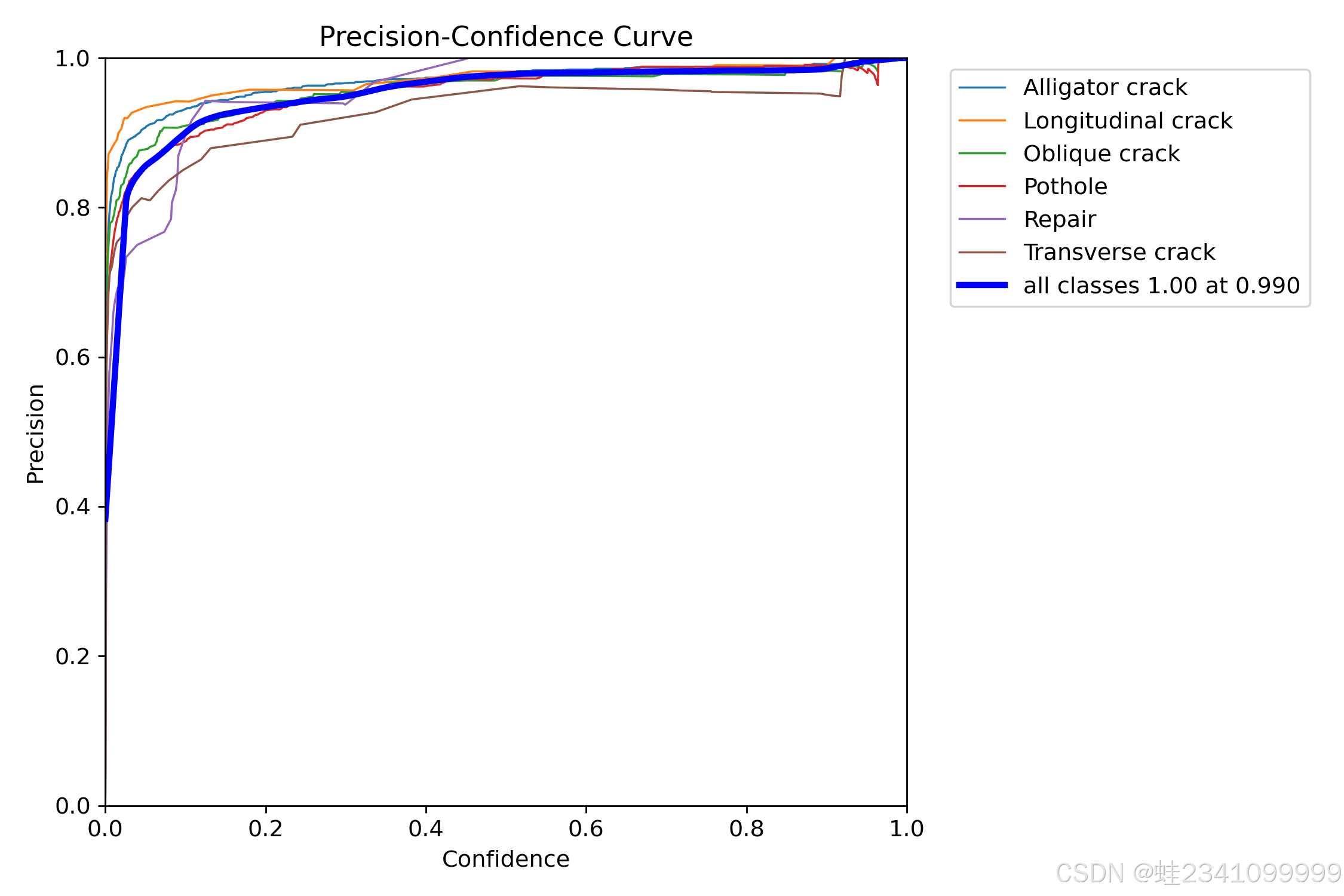
9.yolov10-n的Precision曲线
10.yolov10-s的Precision曲线
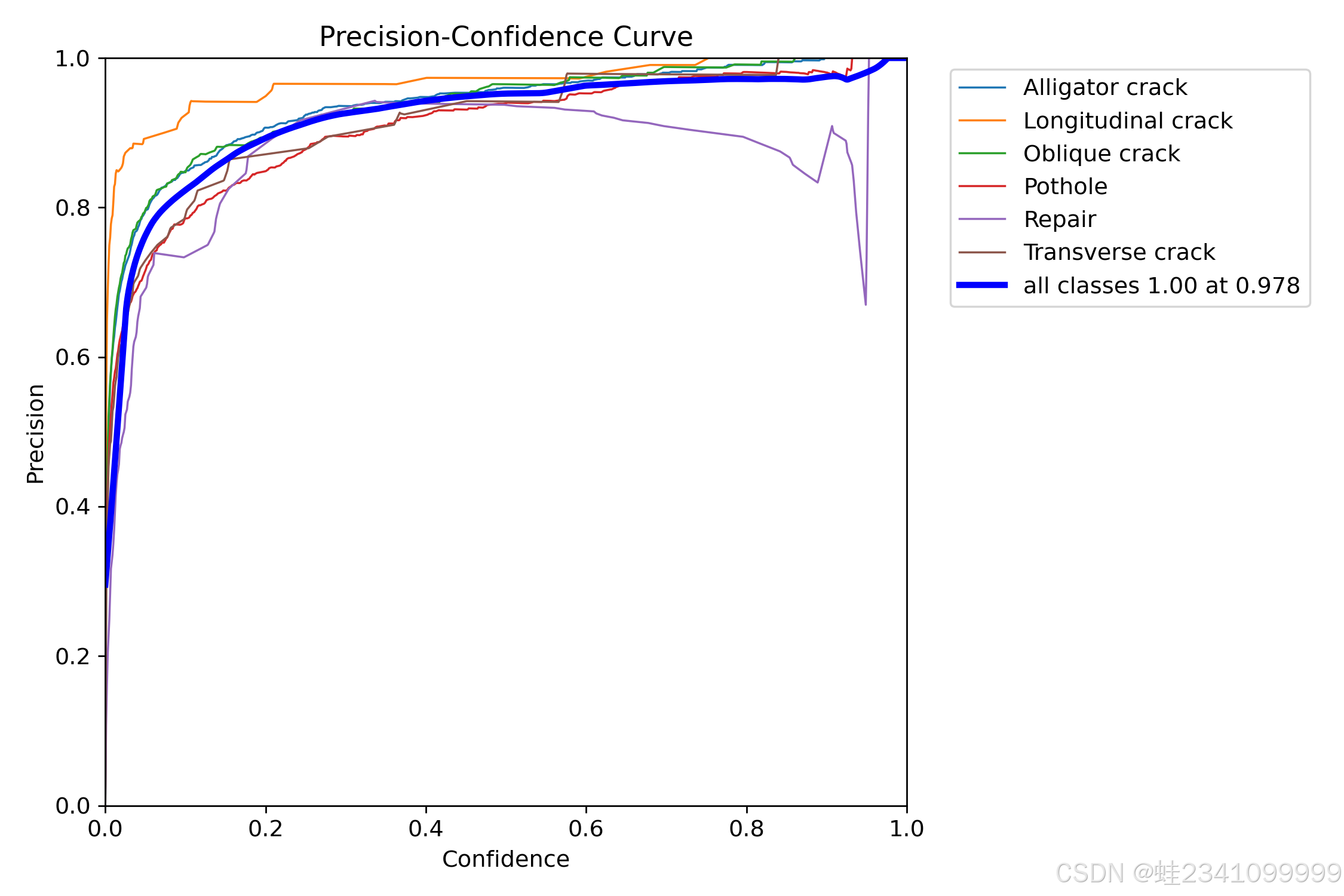
11.yolov10-l的Precision曲线
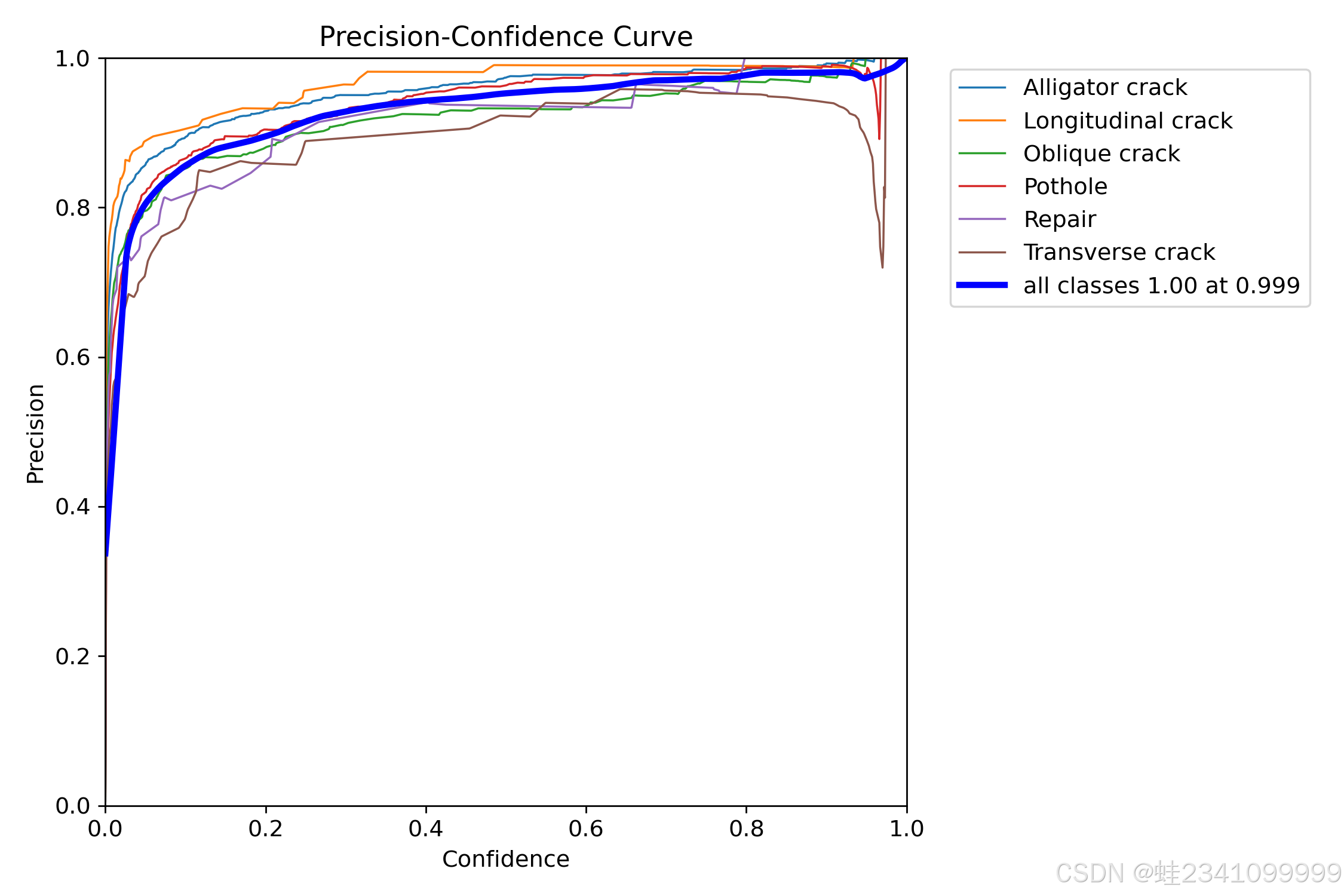
12.yolov10-x的Precision曲线
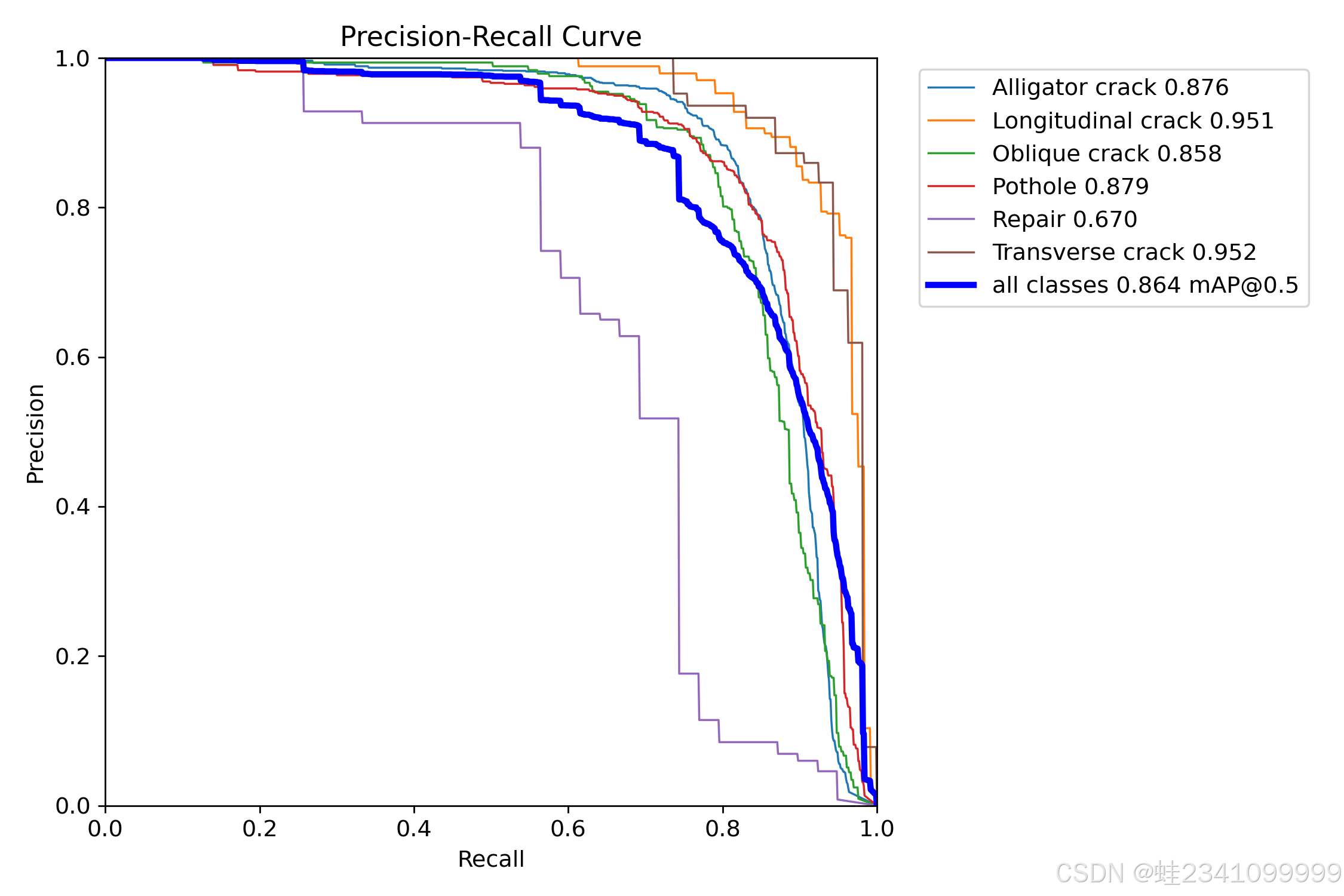
13.yolov10-n的PR曲线
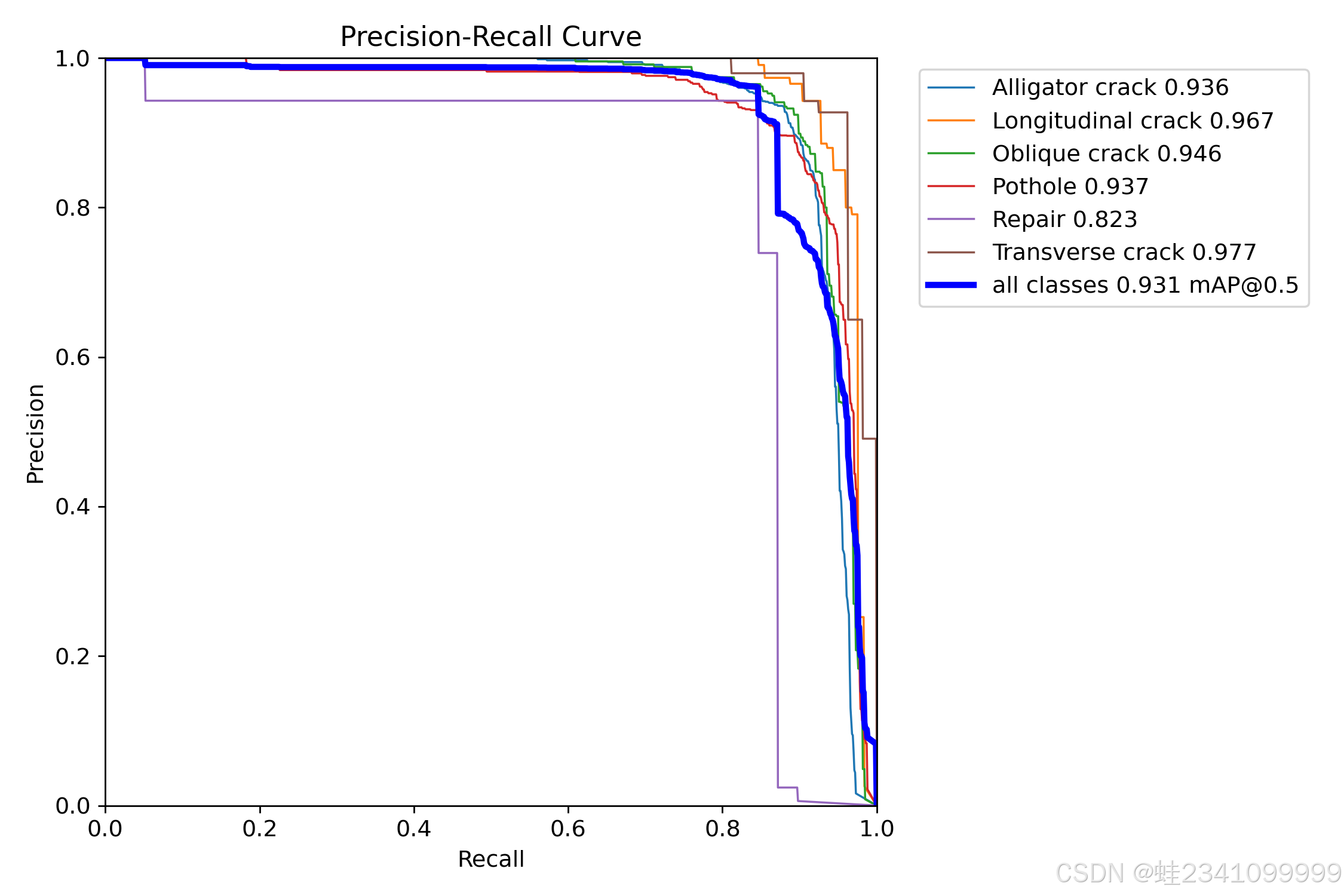
14.yolov10-s的PR曲线
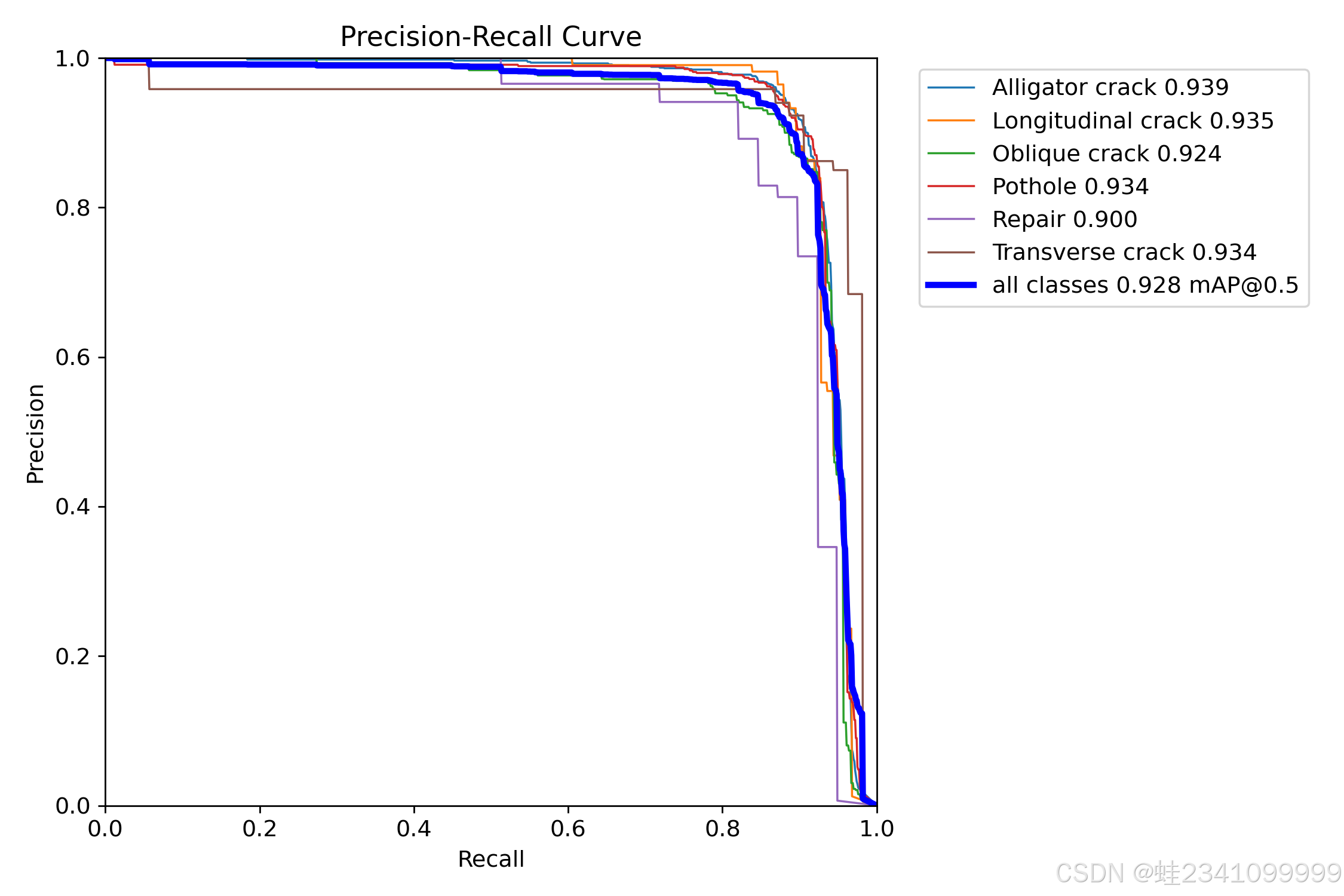
15.yolov10-l的PR曲线
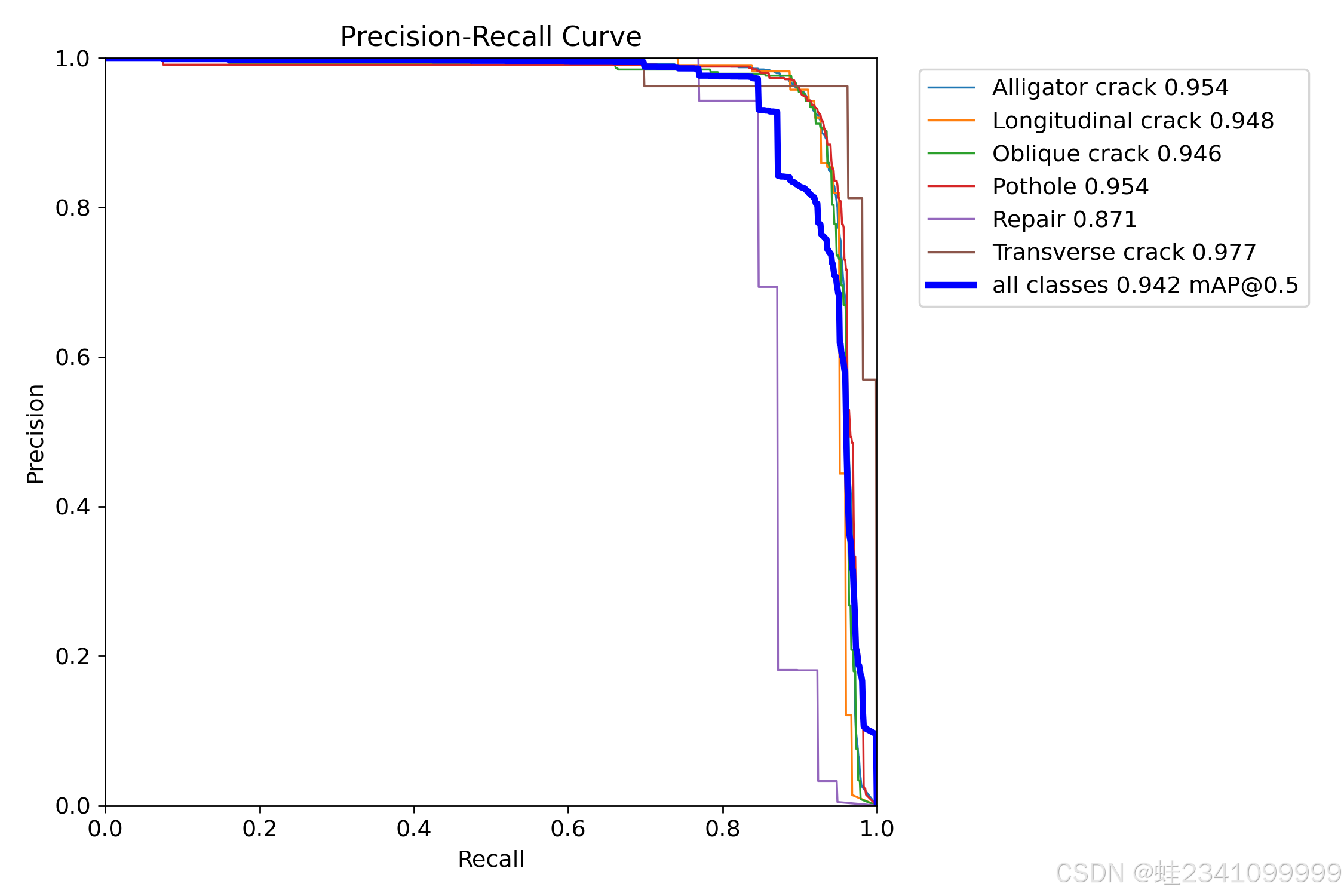
16.yolov10-x的PR曲线
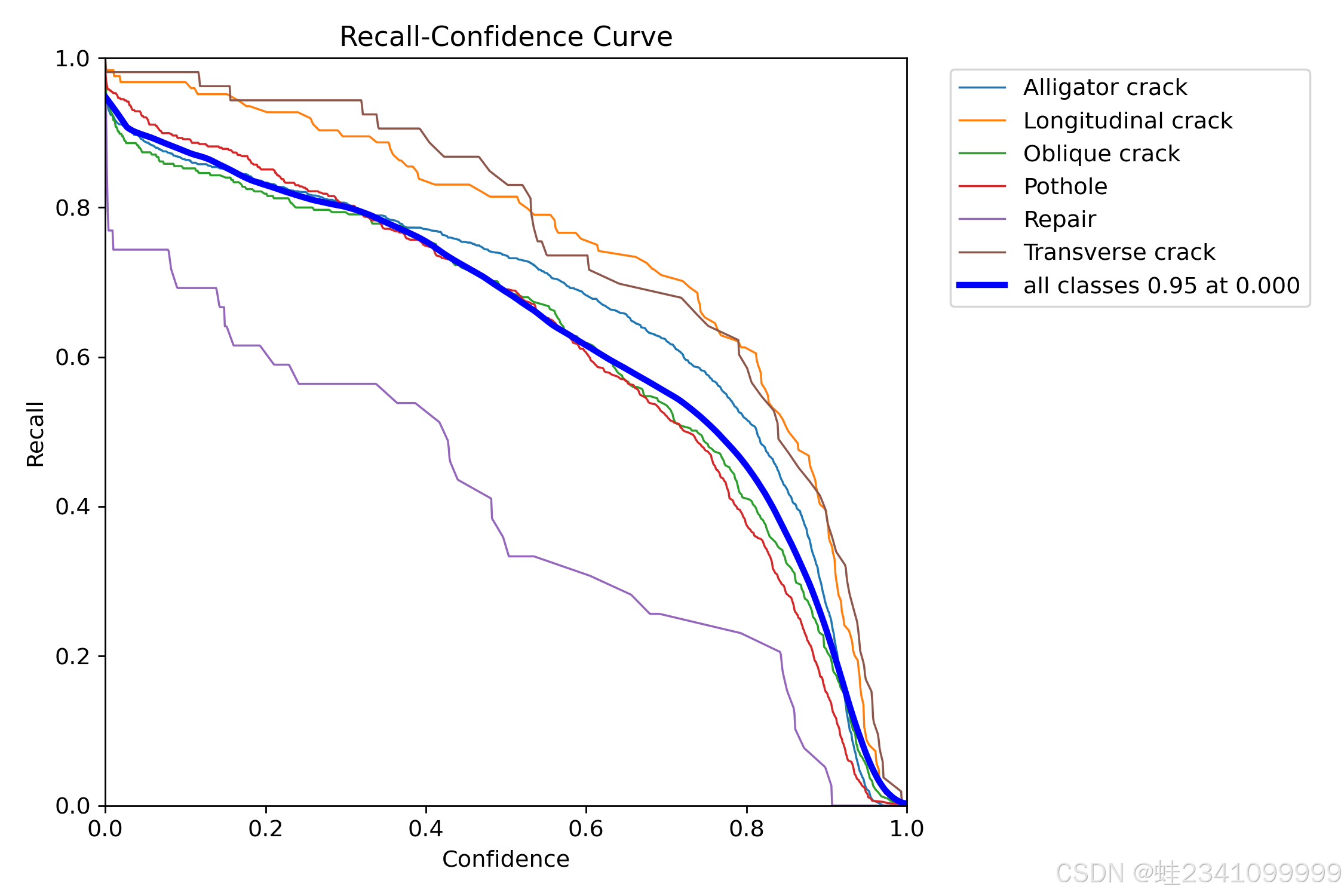
17.yolov10-n的Recall曲线
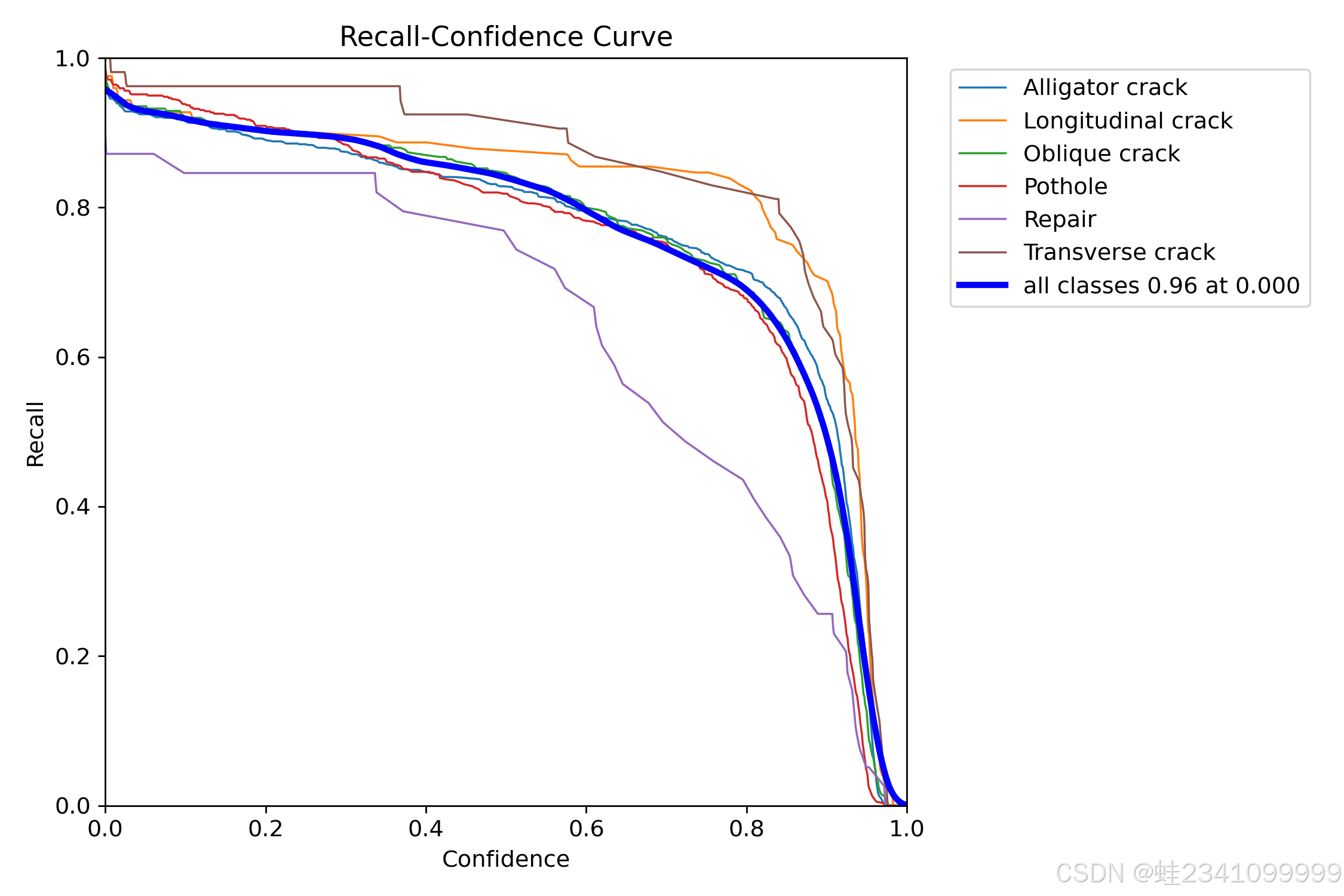
18.yolov10-s的Recall曲线
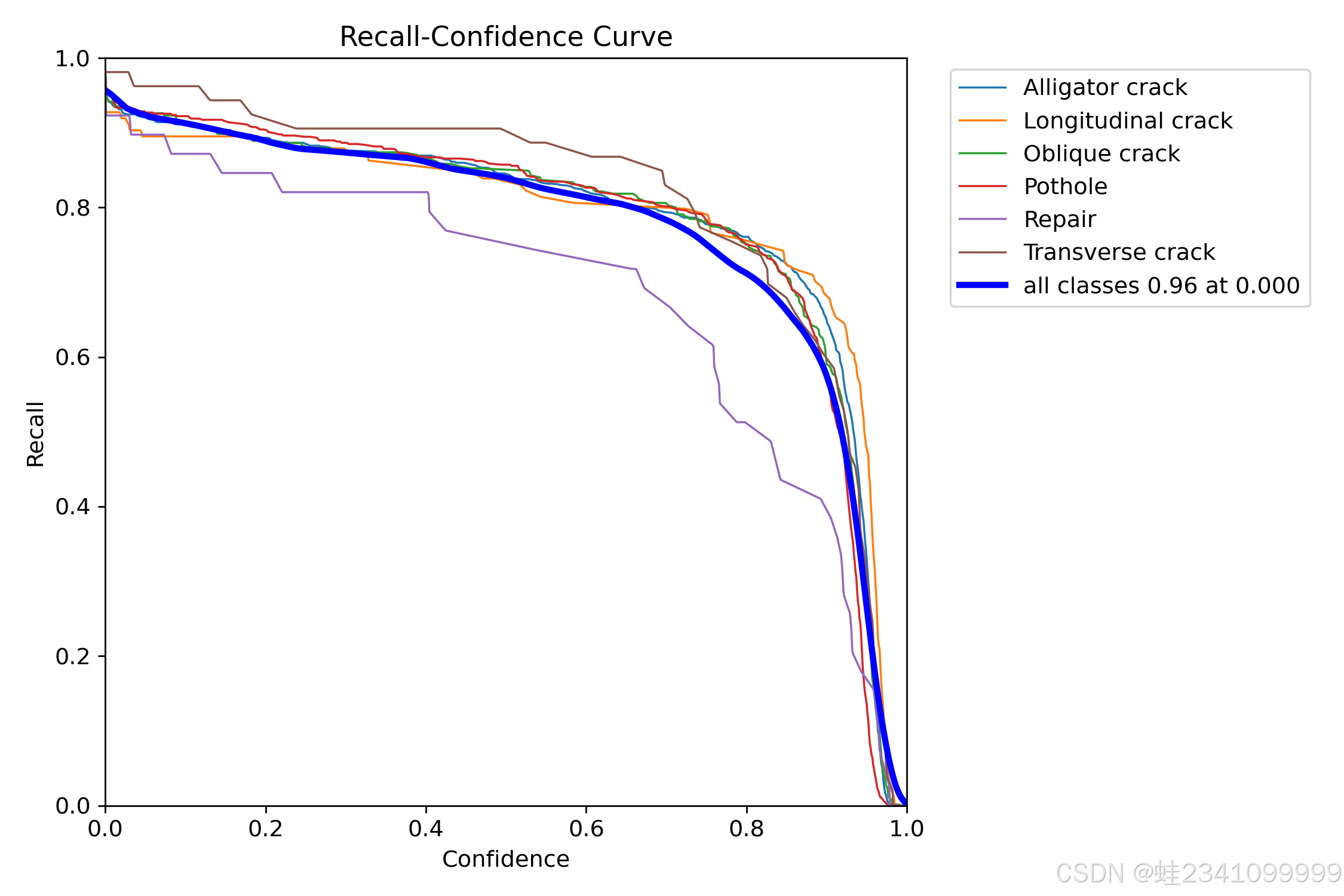
19.yolov10-l的Recall曲线
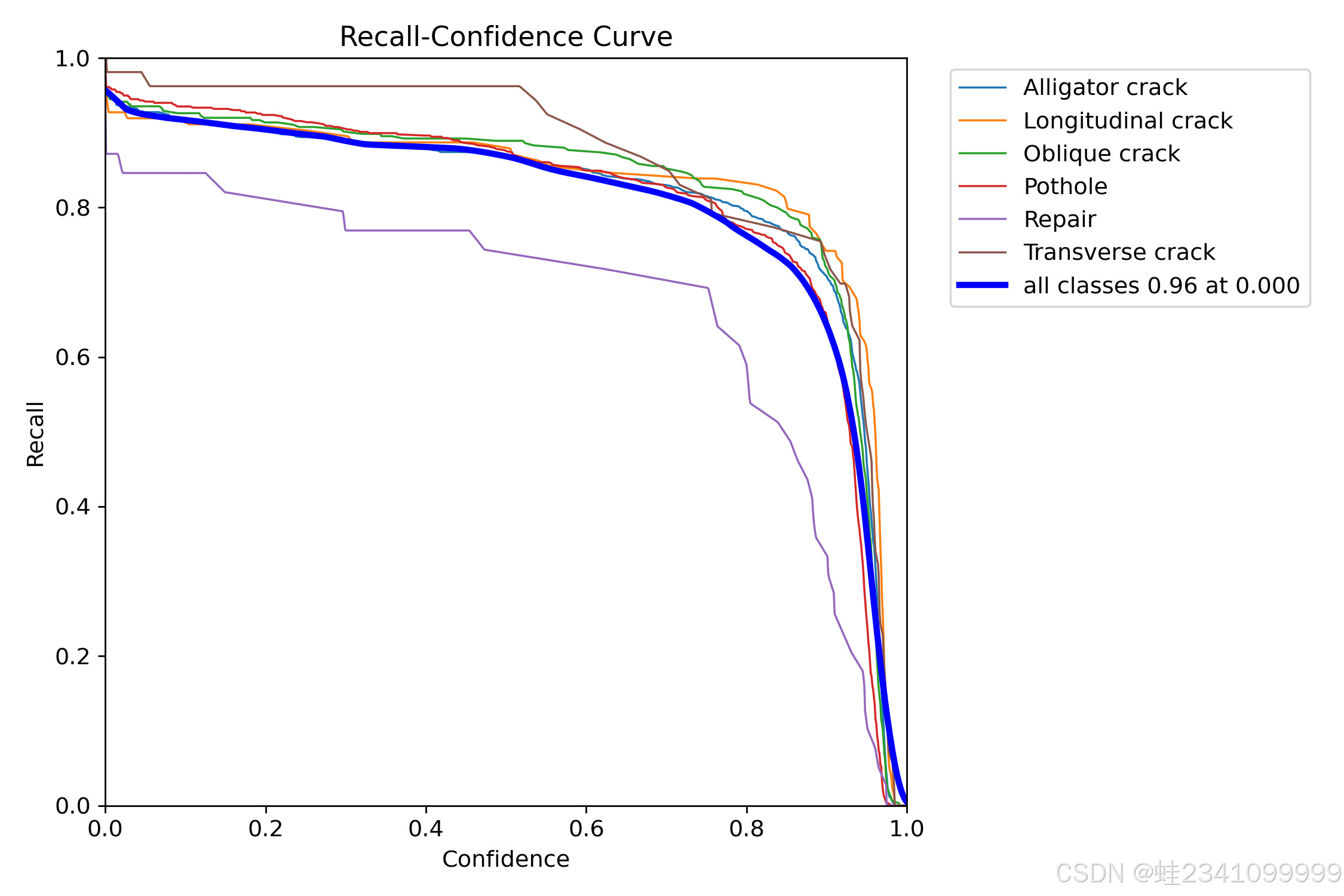
20.yolov10-x的Recall曲线
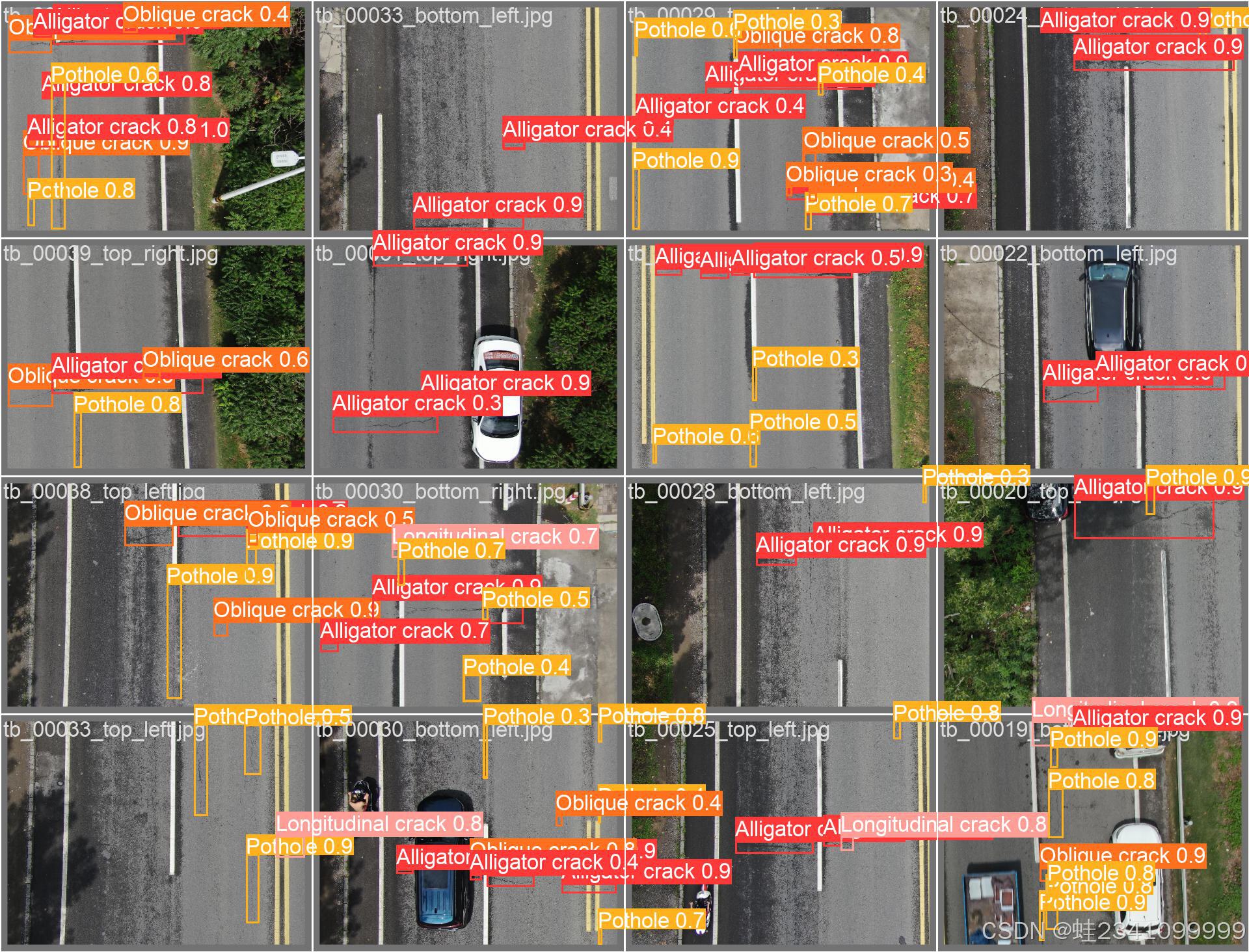
21.yolov10-n的训练识别可视化图
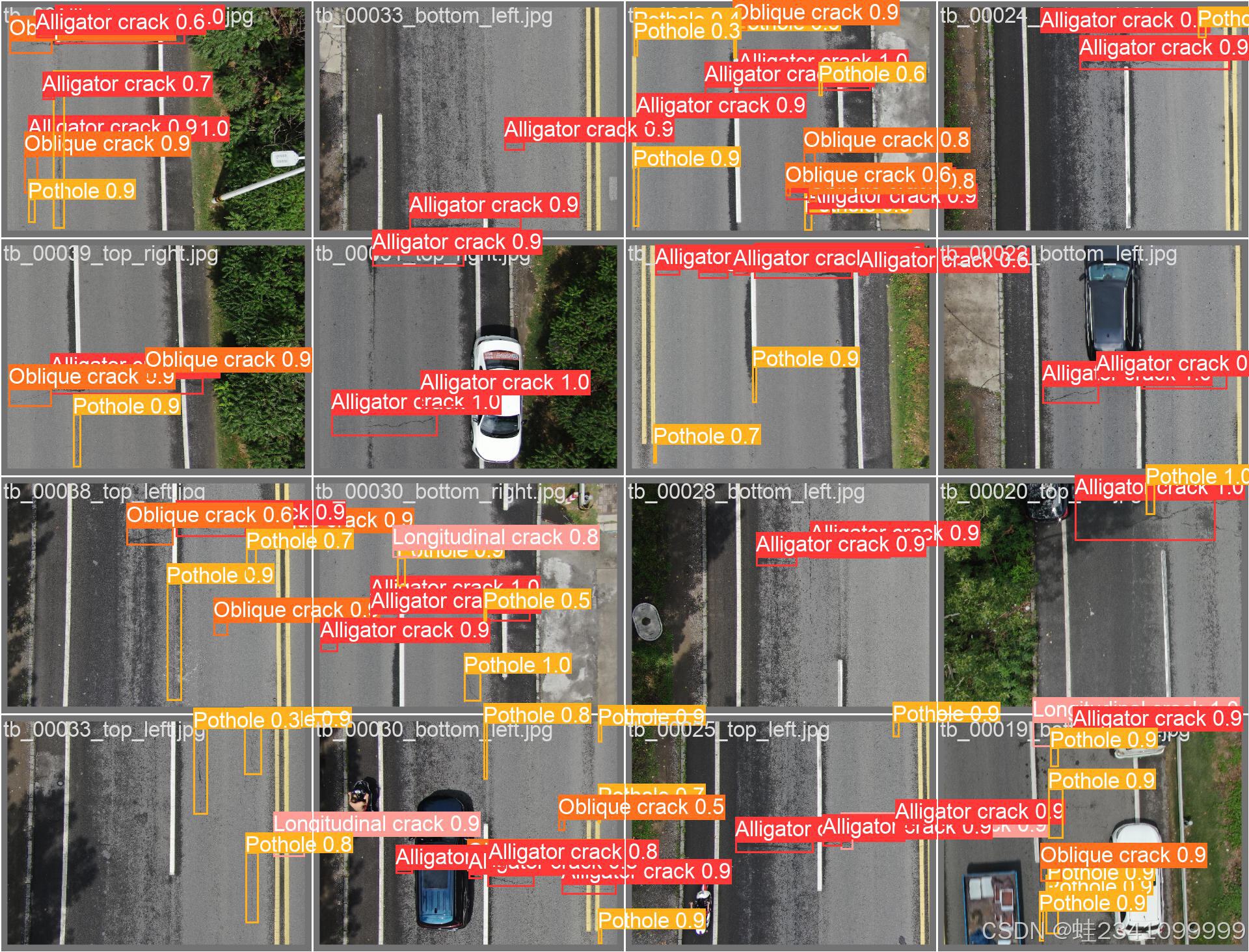
22.yolov10-s的训练识别可视化图
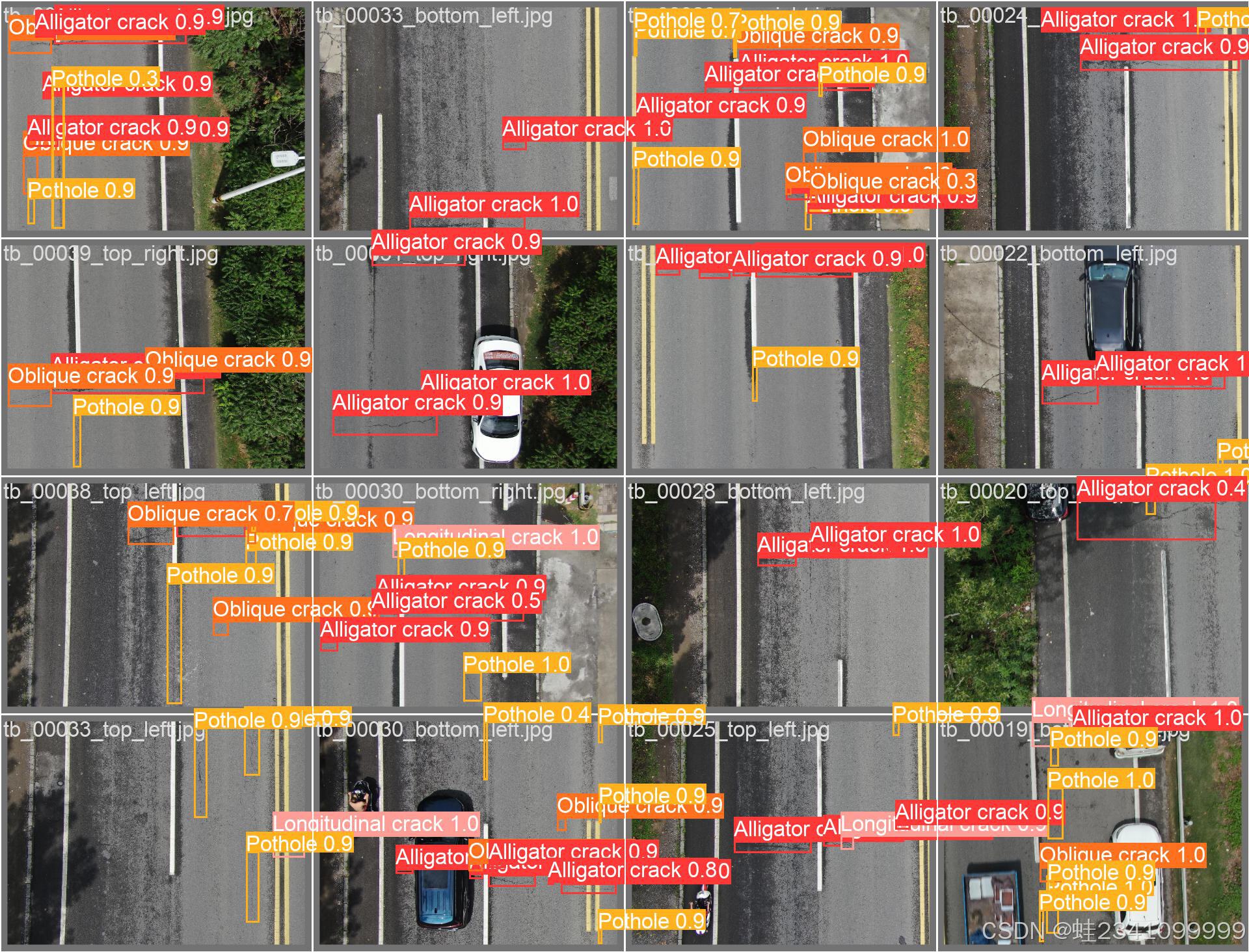
23.yolov10-l的训练识别可视化图

24.yolov10-x的训练识别可视化图
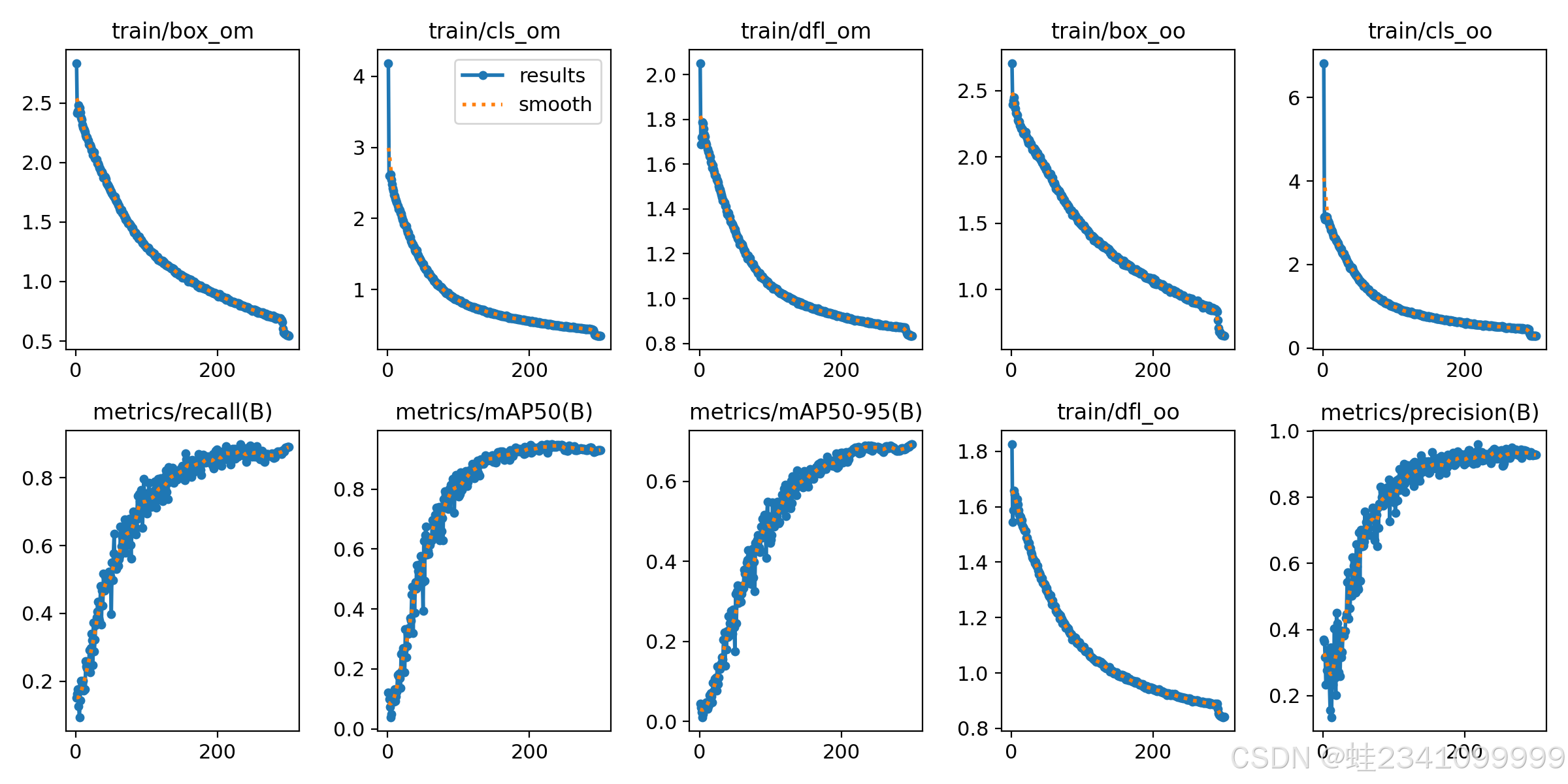
25.yolov10-n的训练参数可视化图
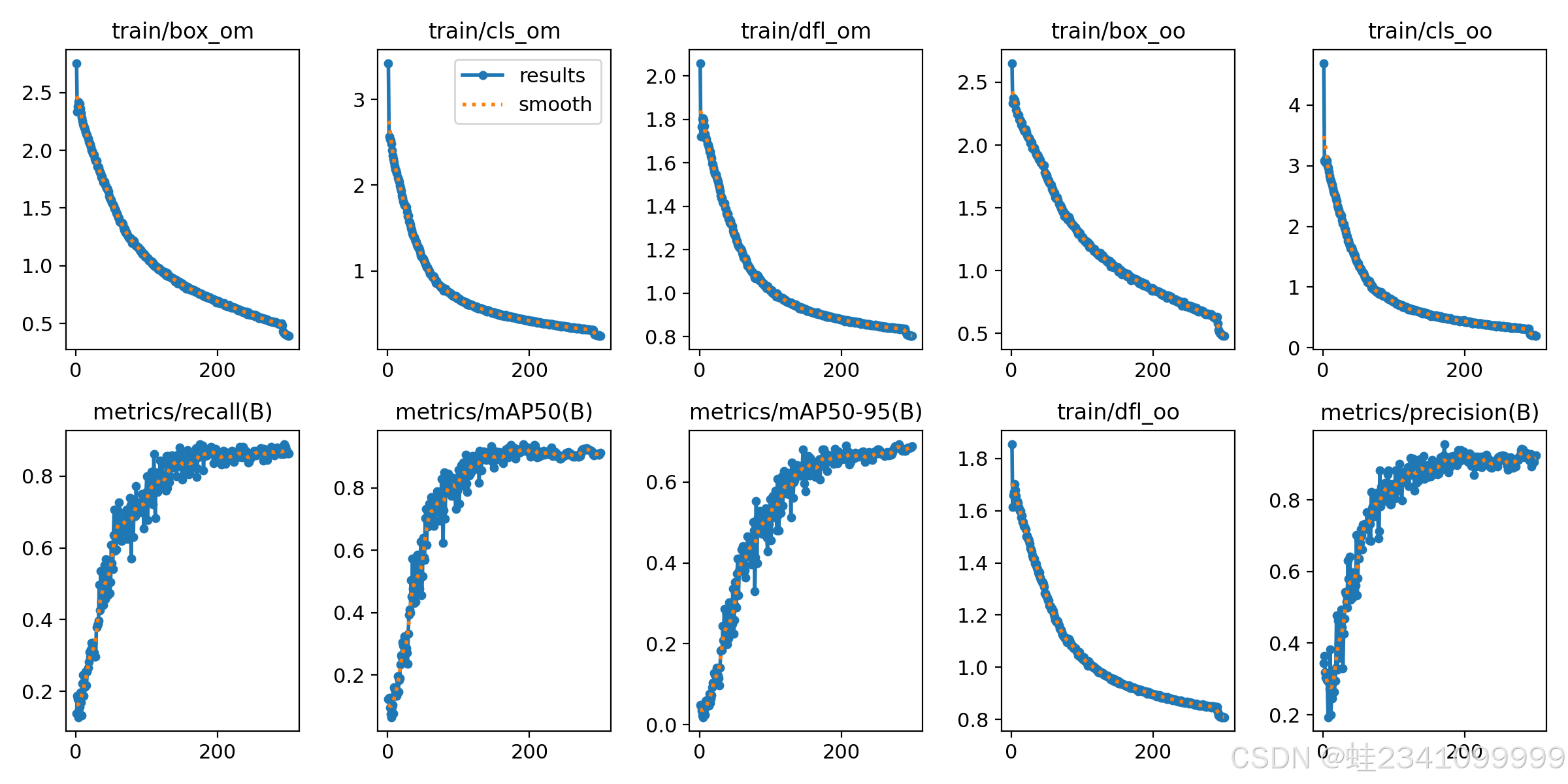
26.yolov10-s的训练参数可视化图
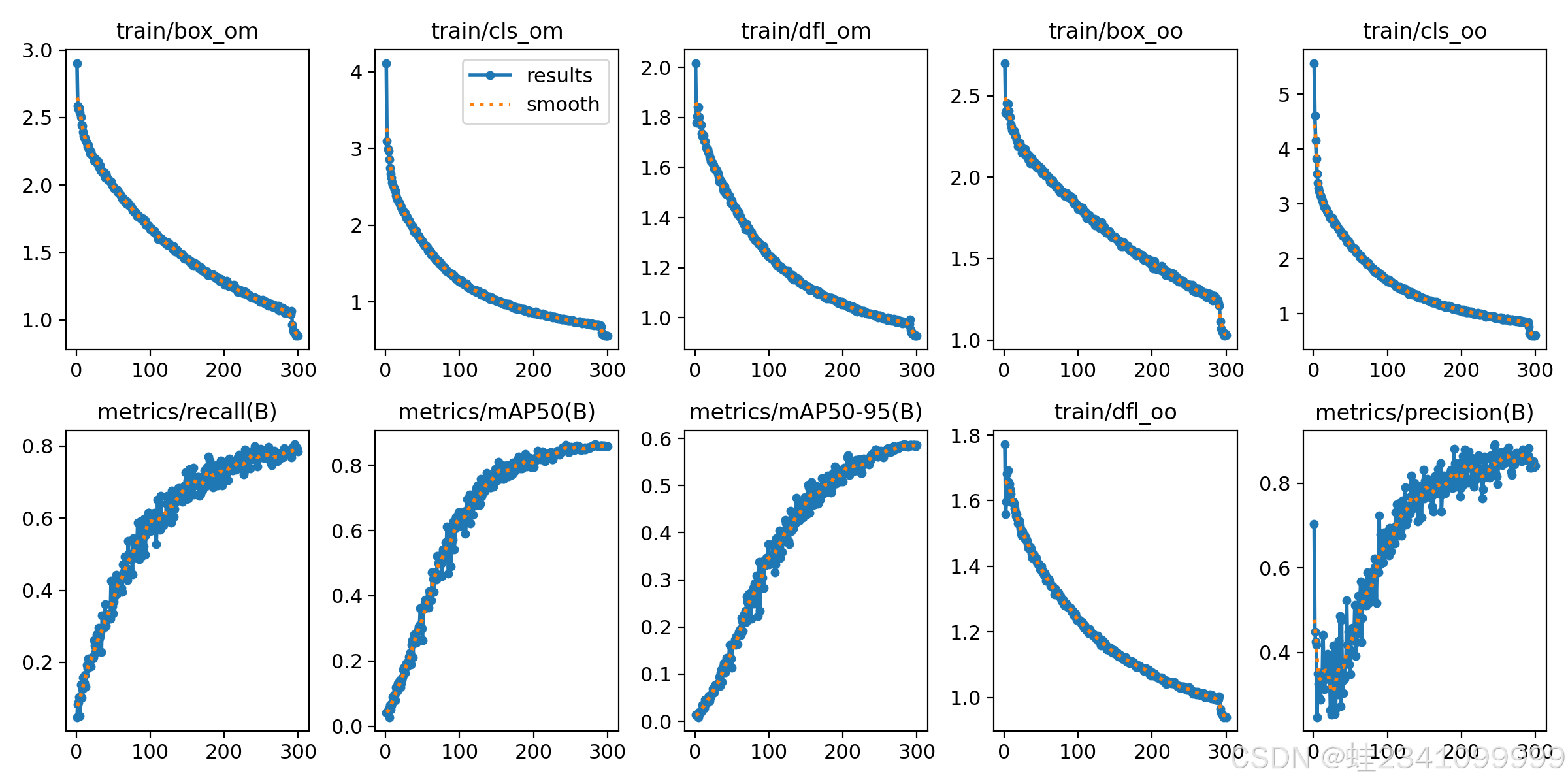
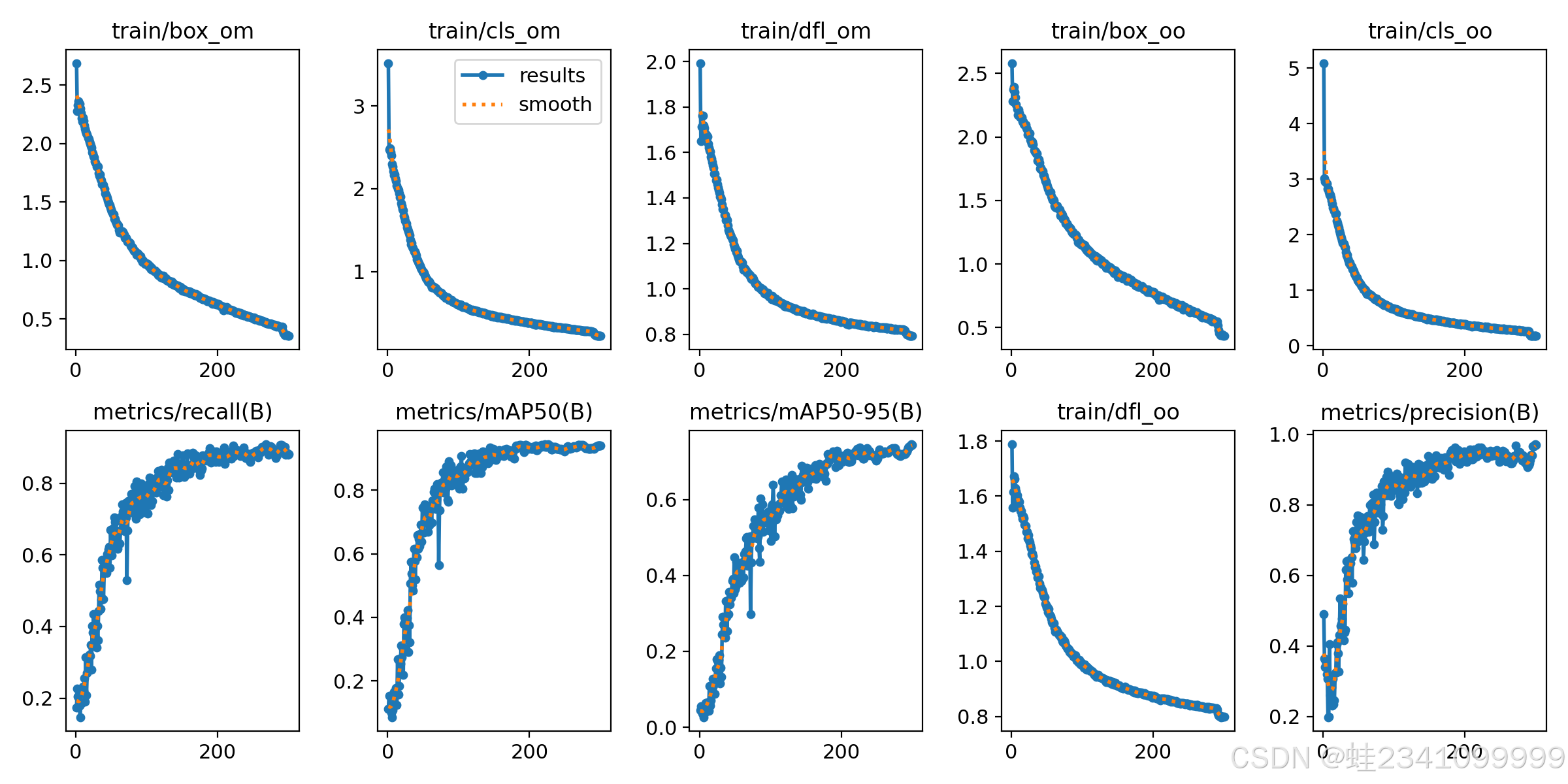
27.yolov10-l的训练参数可视化图
28.yolov10-x的训练参数可视化图
参考文献:
[1]Redmon J, et al. You Only Look Once: Unified, Real-Time Object Detection. CVPR 2016.
[2]YOLOv10:实时端到端物体检测[EB/OL]. (2024-9-27) [2025-3-4].
https://docs.ultralytics.com/zh/models/yolov10
[3]新一代目标检测来了:YOLOv10 | 理论概要[EB/OL]. (2024-5-21) [2025-3-4].
https://blog.csdn.net/weixin_38739735/article/details/139364505
[4]YOLOv10开源,高效轻量实时端到端目标检测新标准,速度提升46%[EB/OL]. (2024-6-5) [2025-3-4].https://blog.csdn.net/nulifancuoAI/article/details/139455710
[5]Haohui Y ,Junfei Z .UAV-PDD2023: A benchmark dataset for pavement distress detection based on UAV images[J].Data in Brief,2023,51109692-109692.
[6]【开源数据集】无人机道路破损检测数据集UAV-PDD2023[EB/OL]. (2024-07-04)[2025-3-4]. https://blog.csdn.net/hzg19930513/article/details/140178467.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









