







背景介绍
Canny边缘检是在在1986年提出来的,到今天已经30多年过去了,但Canny算法仍然是图像边缘检测算法中最经典、先进的算法之一。
相比Sobel、Prewitt等算子,Canny算法更为优异。Sobel、Prewitt等算子有如下缺点:
- 没有充分利用边缘的梯度方向。
- 最后得到的二值图,只是简单地利用单阈值进行处理。
而Canny算法基于这两点做了改进,提出了:
- 基于边缘梯度方向的非极大值抑制。
- 双阈值的滞后阈值处理。
实现步骤
1.滤波平滑
滤波平滑可以平滑噪声,噪声在对检测边缘时候影像很大。常见平滑滤波有高斯滤波,1/159 是对图片的像素值进行归一化,A为图片。

2.计算图像梯度
- 利用sobel算子算出中心点附近的分别沿 x轴和 y轴的差值

- 计算梯度幅值
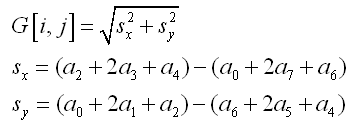
- 计算梯度方向
3.根据角度对幅值进行非极大值抑制
根据上述计算出的角度,分别对应八个领域,四个梯度方向。

在每一点上,领域中心 x 与沿着其对应的梯度方向的两个像素相比,若中心像素为最大值,则保留,否则中心置0,这样可以抑制非极大值,保留局部梯度最大的点,以得到细化的边缘。

def DecideAndConnectEdge(g_l,g_t,threshold = None):
if threshold == None:
lower_boundary = g_l.mean()*0.5
threshold = [lower_boundary,lower_boundary*3]
result = np.zeros(g_l.shape)
for i in range(g_l.shape[0]):
for j in range(g_l.shape[1]):
isLocalExtreme = True
eight_neiborhood = g_l[max(0,i-1):min(i+2,g_l.shape[0]),max(0,j-1):min(j+2,g_l.shape[1])]
if eight_neiborhood.shape == (3,3):
if g_t[i,j] <= -1:
x = 1/g_t[i,j]
first = eight_neiborhood[0,1] + (eight_neiborhood[0,1] - eight_neiborhood[0,0])*x
x = -x
second = eight_neiborhood[2,1] + (eight_neiborhood[2,2] - eight_neiborhood[2,1])*x
if not (g_l[i,j] > first and g_l[i,j] > second):
isLocalExtreme = False
elif g_t[i,j] >= 1:
x = 1 / g_t[i, j]
first = eight_neiborhood[0, 1] + (eight_neiborhood[0, 2] - eight_neiborhood[0, 1]) * x
x = -x
second = eight_neiborhood[2, 1] + (eight_neiborhood[2, 1] - eight_neiborhood[2, 0]) * x
if not (g_l[i, j] > first and g_l[i, j] > second):
isLocalExtreme = False
elif g_t[i,j] >= 0 and g_t[i,j] < 1:
y = g_t[i, j]
first = eight_neiborhood[1, 2] + (eight_neiborhood[0, 2] - eight_neiborhood[1, 2]) * y
y = -y
second = eight_neiborhood[1, 0] + (eight_neiborhood[1, 0] - eight_neiborhood[2, 0]) * y
if not (g_l[i, j] > first and g_l[i, j] > second):
isLocalExtreme = False
elif g_t[i,j] < 0 and g_t[i,j] > -1:
y = g_t[i, j]
first = eight_neiborhood[1, 2] + (eight_neiborhood[1, 2] - eight_neiborhood[2, 2]) * y
y = -y
second = eight_neiborhood[1, 0] + (eight_neiborhood[0, 0] - eight_neiborhood[1, 0]) * y
if not (g_l[i, j] > first and g_l[i, j] > second):
isLocalExtreme = False
if isLocalExtreme:
result[i,j] = g_l[i,j] #非极大值抑制
result[result>=threshold[1]] = 255
result[result<=threshold[0]] = 0
result = judgeConnect(result,threshold)
result[result!=255] = 0
return result4. 用双阈值算法检测和连接边缘
由3得到了各个离散点,在下面通过设置双阀值,取 max>h(x,y)>min 的各个点进行连接。

def judgeConnect(m2,threshold):
e = 0.01
s = []
cood = []
for i in range(m2.shape[0]):
cood.append([])
for j in range(m2.shape[1]):
cood[-1].append([i,j])
if abs(m2[i,j] - 255) < e:
s.append([i,j])
cood = np.array(cood)
while not len(s) == 0:
index = s.pop()
jud = m2[max(0, index[0] - 1):min(index[0] + 2, m2.shape[1]), max(0, index[1] - 1):min(index[1] + 2, m2.shape[0])]
jud_i = cood[max(0, index[0] - 1):min(index[0] + 2, cood.shape[1]), max(0, index[1] - 1):min(index[1] + 2, cood.shape[0])]
jud = (jud > threshold[0])&(jud < threshold[1])
jud_i = jud_i[jud]
for i in range(jud_i.shape[0]):
s.append(list(jud_i[i]))
m2[jud_i[i][0],jud_i[i][1]] = 255
return m2复现代码
#coding:utf-8
import numpy as np
import matplotlib.pyplot as plt
import os
import math
import cv2
def convolve(filter,mat,padding,strides):
'''
:param filter:卷积核,必须为二维(2 x 1也算二维) 否则返回None
:param mat:图片
:param padding:对齐
:param strides:移动步长
:return:返回卷积后的图片。(灰度图,彩图都适用)
'''
result = None
filter_size = filter.shape
mat_size = mat.shape
if len(filter_size) == 2:
if len(mat_size) == 3:
channel = []
for i in range(mat_size[-1]):
pad_mat = np.pad(mat[:,:,i], ((padding[0], padding[1]), (padding[2], padding[3])), 'constant')
temp = []
for j in range(0,mat_size[0],strides[1]):
temp.append([])
for k in range(0,mat_size[1],strides[0]):
val = (filter*pad_mat[j*strides[1]:j*strides[1]+filter_size[0],
k*strides[0]:k*strides[0]+filter_size[1]]).sum()
temp[-1].append(val)
channel.append(np.array(temp))
channel = tuple(channel)
result = np.dstack(channel)
elif len(mat_size) == 2:
channel = []
pad_mat = np.pad(mat, ((padding[0], padding[1]), (padding[2], padding[3])), 'constant')
for j in range(0, mat_size[0], strides[1]):
channel.append([])
for k in range(0, mat_size[1], strides[0]):
val = (filter * pad_mat[j * strides[1]:j * strides[1] + filter_size[0],
k * strides[0]:k * strides[0] + filter_size[1]]).sum()
channel[-1].append(val)
result = np.array(channel)
return result
def linear_convolve(filter,mat,padding=None,strides=[1,1]):
'''
:param filter:线性卷积核
:param mat:图片
:param padding:对齐
:param strides:移动步长
:return:返回卷积后的图片。(灰度图,彩图都适用) 若不是线性卷积核,返回None
'''
result = None
filter_size = filter.shape
if len(filter_size) == 2 and 1 in filter_size:
if padding == None or len(padding) < 2:
if filter_size[1] == 1:
padding = [filter_size[0]//2,filter_size[0]//2]
elif filter_size[0] == 1:
padding = [filter_size[1]//2,filter_size[1]//2]
if filter_size[0] == 1:
result = convolve(filter,mat,[0,0,padding[0],padding[1]],strides)
elif filter_size[1] == 1:
result = convolve(filter, mat, [padding[0],padding[1],0,0], strides)
return result
def _2_dim_divided_convolve(filter,mat):
'''
:param filter: 线性卷积核,必须为二维(2 x 1也算二维) 否则返回None
:param mat: 图片
:return: 卷积后的图片,(灰度图,彩图都适用) 若不是线性卷积核,返回None
'''
result = None
if 1 in filter.shape:
result = linear_convolve(filter,mat)
result = linear_convolve(filter.T,result)
return result
def judgeConnect(m2,threshold):
e = 0.01
s = []
cood = []
for i in range(m2.shape[0]):
cood.append([])
for j in range(m2.shape[1]):
cood[-1].append([i,j])
if abs(m2[i,j] - 255) < e:
s.append([i,j])
cood = np.array(cood)
while not len(s) == 0:
index = s.pop()
jud = m2[max(0, index[0] - 1):min(index[0] + 2, m2.shape[1]), max(0, index[1] - 1):min(index[1] + 2, m2.shape[0])]
jud_i = cood[max(0, index[0] - 1):min(index[0] + 2, cood.shape[1]), max(0, index[1] - 1):min(index[1] + 2, cood.shape[0])]
jud = (jud > threshold[0])&(jud < threshold[1])
jud_i = jud_i[jud]
for i in range(jud_i.shape[0]):
s.append(list(jud_i[i]))
m2[jud_i[i][0],jud_i[i][1]] = 255
return m2
def DecideAndConnectEdge(g_l,g_t,threshold = None):
if threshold == None:
lower_boundary = g_l.mean()*0.5
threshold = [lower_boundary,lower_boundary*3]
result = np.zeros(g_l.shape)
for i in range(g_l.shape[0]):
for j in range(g_l.shape[1]):
isLocalExtreme = True
eight_neiborhood = g_l[max(0,i-1):min(i+2,g_l.shape[0]),max(0,j-1):min(j+2,g_l.shape[1])]
if eight_neiborhood.shape == (3,3):
if g_t[i,j] <= -1:
x = 1/g_t[i,j]
first = eight_neiborhood[0,1] + (eight_neiborhood[0,1] - eight_neiborhood[0,0])*x
x = -x
second = eight_neiborhood[2,1] + (eight_neiborhood[2,2] - eight_neiborhood[2,1])*x
if not (g_l[i,j] > first and g_l[i,j] > second):
isLocalExtreme = False
elif g_t[i,j] >= 1:
x = 1 / g_t[i, j]
first = eight_neiborhood[0, 1] + (eight_neiborhood[0, 2] - eight_neiborhood[0, 1]) * x
x = -x
second = eight_neiborhood[2, 1] + (eight_neiborhood[2, 1] - eight_neiborhood[2, 0]) * x
if not (g_l[i, j] > first and g_l[i, j] > second):
isLocalExtreme = False
elif g_t[i,j] >= 0 and g_t[i,j] < 1:
y = g_t[i, j]
first = eight_neiborhood[1, 2] + (eight_neiborhood[0, 2] - eight_neiborhood[1, 2]) * y
y = -y
second = eight_neiborhood[1, 0] + (eight_neiborhood[1, 0] - eight_neiborhood[2, 0]) * y
if not (g_l[i, j] > first and g_l[i, j] > second):
isLocalExtreme = False
elif g_t[i,j] < 0 and g_t[i,j] > -1:
y = g_t[i, j]
first = eight_neiborhood[1, 2] + (eight_neiborhood[1, 2] - eight_neiborhood[2, 2]) * y
y = -y
second = eight_neiborhood[1, 0] + (eight_neiborhood[0, 0] - eight_neiborhood[1, 0]) * y
if not (g_l[i, j] > first and g_l[i, j] > second):
isLocalExtreme = False
if isLocalExtreme:
result[i,j] = g_l[i,j] #非极大值抑制
result[result>=threshold[1]] = 255
result[result<=threshold[0]] = 0
result = judgeConnect(result,threshold)
result[result!=255] = 0
return result
def OneDimensionStandardNormalDistribution(x,sigma):
E = -0.5/(sigma*sigma)
return 1/(math.sqrt(2*math.pi)*sigma)*math.exp(x*x*E)
if __name__ == '__main__':
sobel_kernel_y = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]])
sobel_kernel_x = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]])
pic_path = './img/'
pics = os.listdir(pic_path)
for i in pics:
if i[-4:] == '.png'or i[-4:] == '.jpg' or i[-5:] == '.jpeg':
filename = pic_path + i
img = plt.imread(filename)
if i[-4:] == '.png':
img = img*255
img = img.mean(axis=-1) #this is a way to get a gray image.
sigma = 1.52
dim = int(np.round(6*sigma+1))
if dim % 2 == 0:
dim += 1
linear_Gaussian_filter = [np.abs(t - (dim//2)) for t in range(dim)]
linear_Gaussian_filter = np.array([[OneDimensionStandardNormalDistribution(t,sigma) for t in linear_Gaussian_filter]])
linear_Gaussian_filter = linear_Gaussian_filter/linear_Gaussian_filter.sum()
img2 = _2_dim_divided_convolve(linear_Gaussian_filter,img)
# img2 = convolve(Gaussian_filter_5, img, [2, 2, 2, 2], [1, 1])
plt.imshow(img2.astype(np.uint8), cmap='gray')
plt.axis('off')
plt.show()
# 计算图像边缘点的梯度
img3 = convolve(sobel_kernel_x,img2,[1,1,1,1],[1,1])
img4 = convolve(sobel_kernel_y,img2,[1,1,1,1],[1,1])
gradiant_length = (img3**2+img4**2)**(1.0/2)
img3 = img3.astype(np.float64)
img4 = img4.astype(np.float64)
img3[img3==0]=0.00000001
gradiant_tangent = img4/img3
plt.imshow(gradiant_length.astype(np.uint8), cmap='gray')
plt.axis('off')
plt.show()
#lower_boundary = 50
final_img = DecideAndConnectEdge(gradiant_length,gradiant_tangent)
cv2.imshow('edge',final_img.astype(np.uint8))
cv2.waitKey(0)
















 1146
1146











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











