







1.理论知识
https://zhuanlan.zhihu.com/c_1263787122512822272
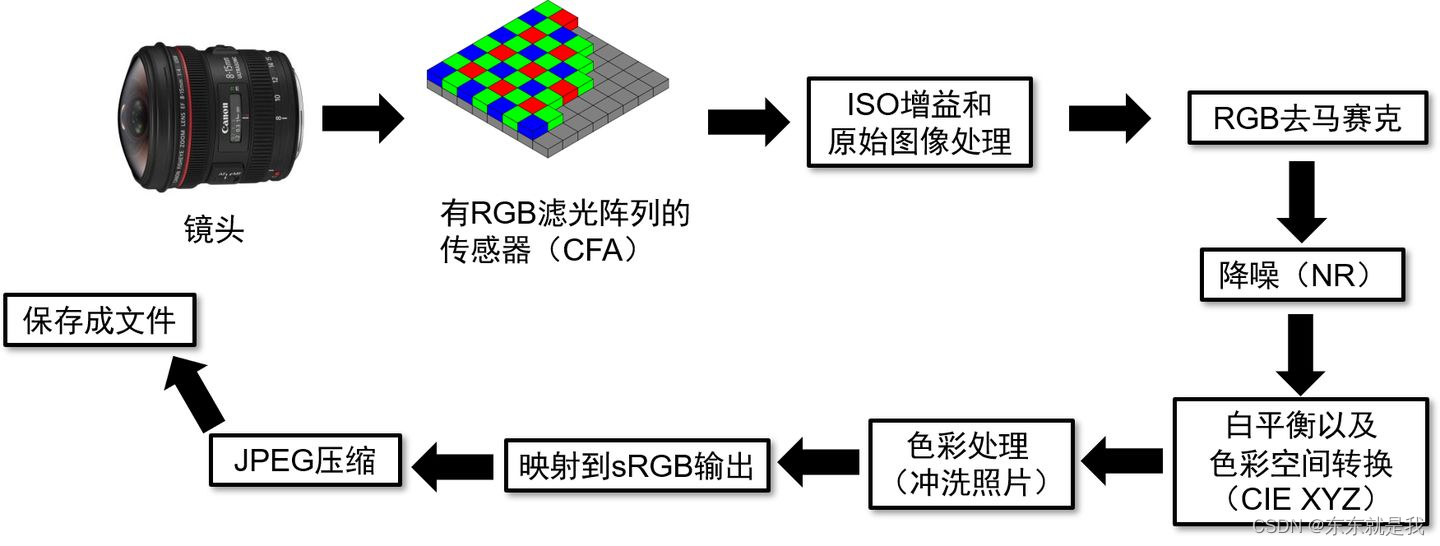
相机工作原理介绍
http://t.zoukankan.com/eve612-p-13841736.html
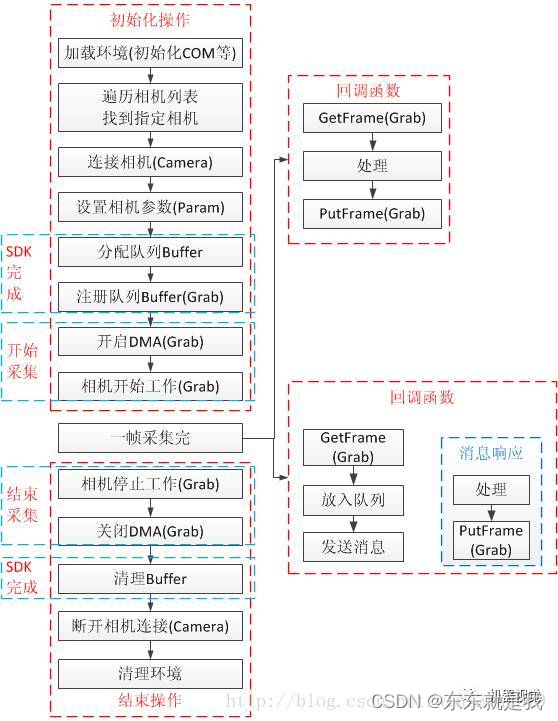
相机SDK介绍
https://zhuanlan.zhihu.com/p/468033445
2.代码解读
(sick的visionary-s双目3D相机的SDK)
1. 链接相机
deviceStreaming = Device.Streaming(args.ipAddress,args.tcpPort)
deviceStreaming.openStream()
''' Opens the streaming channel. '''
def openStream(self):
logging.warning("HPF Opening streaming socket..."),
self.sock_stream = socket.socket(socket.AF_INET, socket.SOCK_STREAM) # 2,1
self.sock_stream.settimeout(5)
try:
self.sock_stream.connect((self.ipAddress, self.tcpPort))
except socket.error as err:
logging.error("Error on connecting to %s:%d: %s" % (self.ipAddress, self.tcpPort, err))
sys.exit(2)
logging.info("...done.")
2.发送接收数据请求
通过socket发送blob请求
deviceStreaming.sendBlobRequest()
def sendBlobRequest(self):
""" Sending a blob request. """
MSG_BLREQ_TX = b'BlbReq'
logging.debug("Sending BlbReq: %s" % (to_hex(MSG_BLREQ_TX)))
self.sock_stream.send(MSG_BLREQ_TX)
3.定义一个data类接受数据
dontStop = True
myData = Data.Data()
4.接受数据放在devicestreaming.frame
while dontStop:
try:
deviceStreaming.getFrame() # 下面有实现
wholeFrame = deviceStreaming.frame
myData.read(wholeFrame)
if myData.hasDepthMap:
print('\nData contains depth map data:')
print('Frame number: ', myData.depthmap.frameNumber)
distanceData = myData.depthmap.distance
前面向相机发送了字符“BlbReq”,然后执行了getframe,
def getFrame(self):
""" Receives the raw data frame from the device via the streaming channel."""
logging.warning('HPF !!_> Reading image from stream...')
keepRunning = True
BLOB_HEAD_LEN = 11
header = self.sock_stream.recv(BLOB_HEAD_LEN) # minimum header
frameAcqStart = time.perf_counter()
logging.debug("len(header) = %d dump: %s" % (len(header),to_hex(header)))
if len(header) < BLOB_HEAD_LEN:
raise RuntimeError("Uh, not enough bytes for BLOB_HEAD_LEN, only %s" % (len(header)))
# check if the header content is as expected
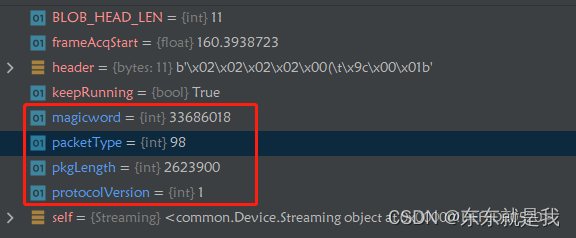
(magicword, pkgLength, protocolVersion, packetType) = \
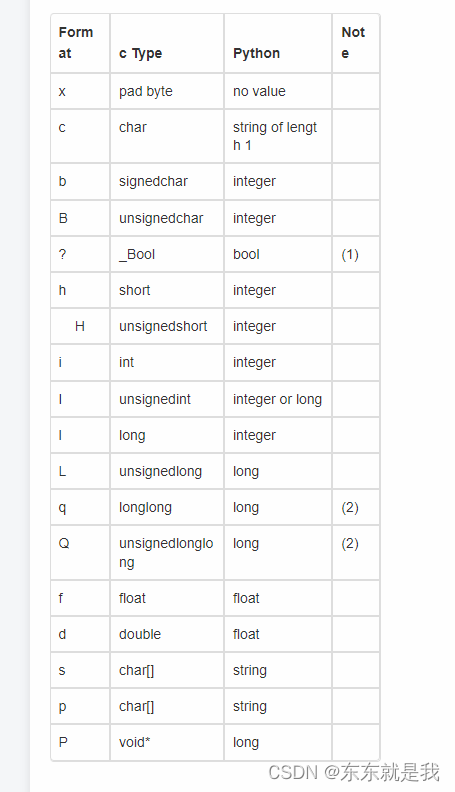
struct.unpack('>IIHB', header) # Python中按一定的格式取出某字符串中的子字符串
if magicword != 0x02020202:
logging.error("Unknown magic word: %0x" % (magicword))
keepRunning = False
if protocolVersion != 0x0001:
logging.error("Unknown protocol version: %0x" % (protocolVersion))
keepRunning = False
if packetType != 0x62:
logging.error("Unknown packet type: %0x" % (packetType))
keepRunning = False
if not keepRunning:
raise RuntimeError('something is wrong with the buffer')
# -3 for protocolVersion and packetType already received
# +1 for checksum
toread = pkgLength - 3 + 1
logging.debug("pkgLength: %d" % (pkgLength))
logging.debug("toread: %d" % (toread))
data = bytearray(len(header) + toread)
view = memoryview(data)
view[:len(header)] = header
view = view[len(header):]
while toread:
nBytes = self.sock_stream.recv_into(view, toread)
if nBytes==0:
# premature end of connection
raise RuntimeError("received {} but requested {} bytes".format(len(data)-len(view), pkgLength))
view = view[nBytes:]
toread -= nBytes
self.frame = str(data)
frameAcqStop = time.perf_counter()
logging.info("Receiving took %0.1f ms"%((frameAcqStop-frameAcqStart)*1000))
# full frame should be received now
logging.debug("...done.")
首先定义一个长度是head+plglength的data数组。然后把数组的内存地址给到view,操作view就相当于操作了data,所有后面获取sock的数据都是存在data里,然后赋值给self.frame
5. 获取frame赋值给刚开始定义的data类
wholeFrame = deviceStreaming.frame
myData.read(wholeFrame)
def read(self, dataBuffer):
""" Extracts necessary data segments and triggers parsing of segments. """
# first 11 bytes contain some internal definitions
tempBuffer = dataBuffer[0:11]
(magicword, pkglength, protocolVersion, packetType) = \
unpack('>IIHB', tempBuffer)
assert (magicword == 0x02020202)
logging.debug("Package length: %s", pkglength)
logging.debug("Protocol version: %s", protocolVersion) # expected to be == 1
logging.debug("Packet type: %s", packetType) # expected to be == 98
# next four bytes an id (should equal 1) and
# the number of segments (should be 3)
tempBuffer = dataBuffer[11:15]
(segid, numSegments) = unpack('>HH', tempBuffer)
logging.debug("Blob ID: %s", segid) # expected to be == 1
logging.debug("Number of segments: %s", numSegments) # expected to be == 3
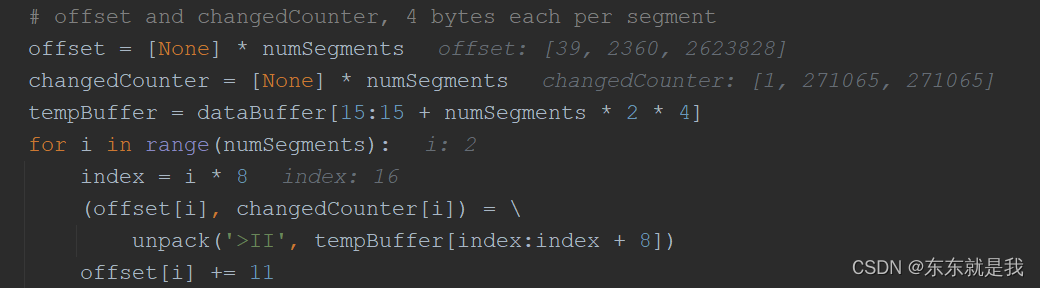
# offset and changedCounter, 4 bytes each per segment
offset = [None] * numSegments
changedCounter = [None] * numSegments
tempBuffer = dataBuffer[15:15 + numSegments * 2 * 4]
for i in range(numSegments):
index = i * 8
(offset[i], changedCounter[i]) = \
unpack('>II', tempBuffer[index:index + 8])
offset[i] += 11
logging.debug("Offsets: %s", offset) # offset in bytes for each segment
logging.debug("Changed counter: %s", changedCounter) # counter for changes in the data
# first segment describes the data format in XML
xmlSegment = dataBuffer[offset[0]:offset[1]]
logging.debug("The whole XML segment:")
logging.debug(xmlSegment)
# second segment contains the binary data
binarySegment = dataBuffer[offset[1]:offset[2]]
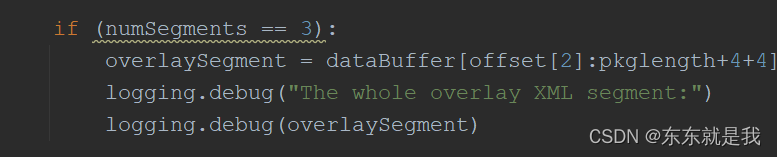
if (numSegments == 3):
overlaySegment = dataBuffer[offset[2]:pkglength+4+4] # numBytes(magicword) = 4, numBytes(pkglength) = 4
logging.debug("The whole overlay XML segment:")
logging.debug(overlaySegment)
checksum = dataBuffer[pkglength+8]
if checksum != self.checksum:
logging.error("Checksum is wrong: %s (expected %s)" % (checksum, self.checksum)) # checksum of whole data
self.corrupted = True
else:
logging.debug("Checksum: %s", checksum) # checksum of whole data
self.corrupted = False
# parsing the XML in order to extract necessary image information
# only parse if something has changed
if (self.changedCounter < changedCounter[0]):
logging.debug("XML did change, parsing started.")
myXMLParser = XMLParser()
myXMLParser.parse(xmlSegment)
self.xmlParser = myXMLParser
self.changedCounter = changedCounter[0]
else:
logging.debug("XML did not change, not parsing again.")
myXMLParser = self.xmlParser
myBinaryParser = BinaryParser()
self.hasDepthMap = False
self.hasPolar2D = False
self.hasCartesian = False
if myXMLParser.hasDepthMap:
logging.debug("Data contains depth map, reading camera params")
self.hasDepthMap = True
self.cameraParams = \
CameraParameters(width=myXMLParser.imageWidth,
height=myXMLParser.imageHeight,
cam2worldMatrix=myXMLParser.cam2worldMatrix,
fx=myXMLParser.fx, fy=myXMLParser.fy,
cx=myXMLParser.cx, cy=myXMLParser.cy,
k1=myXMLParser.k1, k2=myXMLParser.k2,
f2rc=myXMLParser.f2rc)
# extracting data from the binary segment (distance, intensity
# and confidence).
if myXMLParser.stereo:
numBytesDistance = myXMLParser.imageHeight * \
myXMLParser.imageWidth * \
myXMLParser.numBytesPerZValue
else:
numBytesDistance = myXMLParser.imageHeight * \
myXMLParser.imageWidth * \
myXMLParser.numBytesPerDistanceValue
numBytesIntensity = myXMLParser.imageHeight * \
myXMLParser.imageWidth * \
myXMLParser.numBytesPerIntensityValue
numBytesConfidence = myXMLParser.imageHeight * \
myXMLParser.imageWidth * \
myXMLParser.numBytesPerConfidenceValue
try:
numBytesFrameNumber = myXMLParser.numBytesFrameNumber
numBytesQuality = myXMLParser.numBytesQuality
numBytesStatus = myXMLParser.numBytesStatus
except AttributeError:
numBytesFrameNumber = 0
numBytesQuality = 0
numBytesStatus = 0
logging.info("Reading binary segment...")
myBinaryParser.getDepthMap(binarySegment,
numBytesFrameNumber,
numBytesQuality,
numBytesStatus,
numBytesDistance,
numBytesIntensity,
myXMLParser.numBytesPerIntensityValue,
numBytesConfidence)
logging.info("...done.")
if myXMLParser.stereo:
distance = list(myBinaryParser.depthmap.distance)
for i in range(0, len(distance)):
distance[i] = distance[i] / 10.0 #account for sub-millimeter values
myBinaryParser.depthmap.distance = tuple(distance)
self.depthmap = myBinaryParser.depthmap
if myXMLParser.hasPolar2DData:
self.hasPolar2D = True
if (myXMLParser.hasDepthMap):
myBinaryParser.getPolar2D(myBinaryParser.remainingBuffer, myXMLParser.numPolarValues)
else:
myBinaryParser.getPolar2D(binarySegment, myXMLParser.numPolarValues)
if hasattr(myBinaryParser, 'polardata'):
self.polarData2D = myBinaryParser.polardata
else:
self.hasPolar2D = False
elif myXMLParser.hasCartesianData:
self.hasCartesian = True
if (myXMLParser.hasDepthMap):
myBinaryParser.getCartesian(myBinaryParser.remainingBuffer)
else:
myBinaryParser.getCartesian(binarySegment)
if hasattr(myBinaryParser, 'cartesianData'):
self.cartesianData = myBinaryParser.cartesianData
else:
self.hasCartesian = False
- 先取出11个长度的头文件
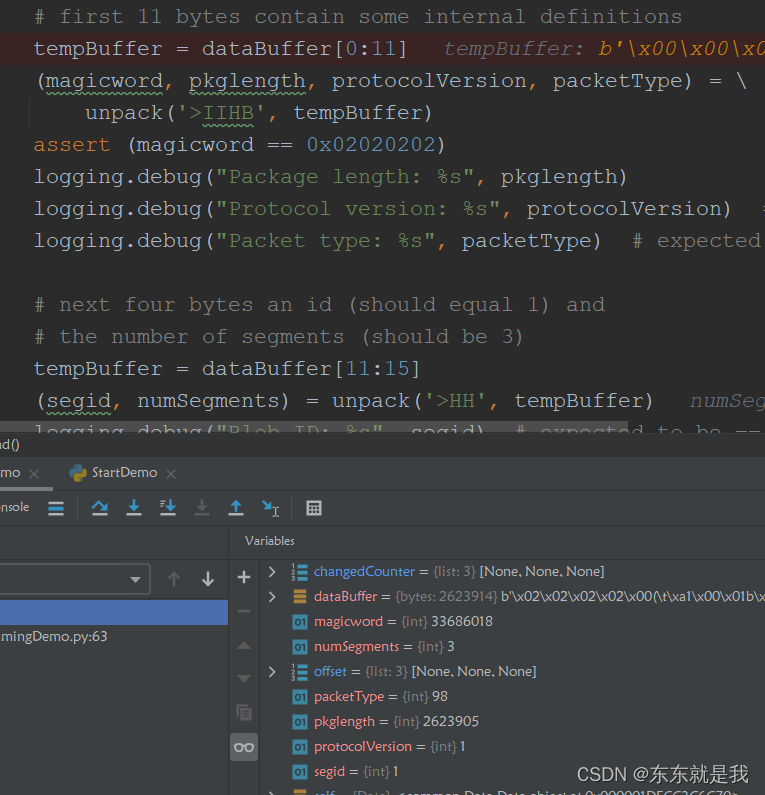 2.取出4个长度
2.取出4个长度
3.给offest和changecounter赋值 offest表示数据片段大小
4.第一个片段,是xml数据,第二个是binary数据,第三个是覆盖xml数据(???)

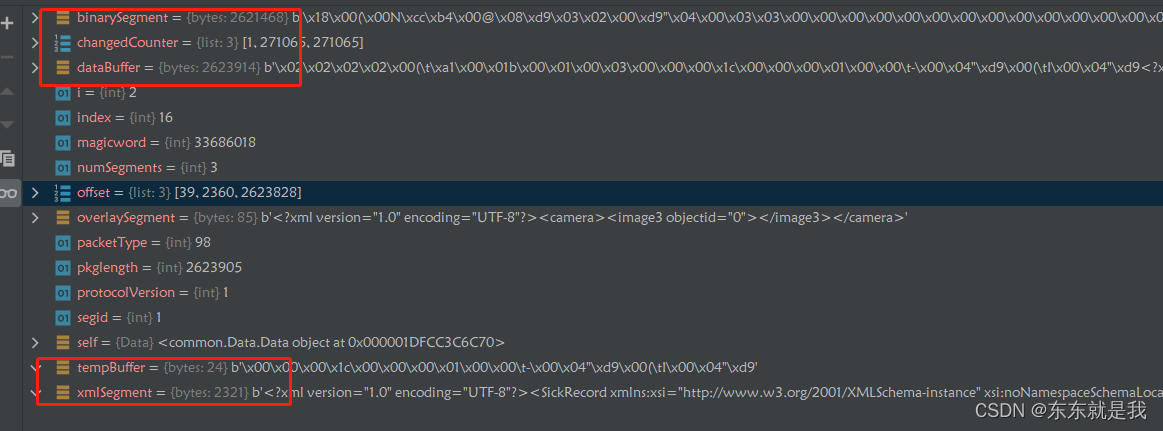
然后把切割出来的数据分发到相应的实例中
这里myxmlparser.parse 是读取xml文件内容 ,然后把self.xmlparser=myXMLParser
根据xml的参数 获取binarysegment中的数据,然后把深度数据放入myBinaryParser的self.depthmap

然后在赋值给self.depthmap
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









