







问题描述:扫描得到的图像文件,存在白色的边框,需要切除。如下图所示。
解决思路:有两种方式。
(1)先通过边缘检测,再进行轮廓发现或者直线检测最大外接矩形,这个方法可以自动调整角度问题。
(2)先通过二值分割,再进行形态学操作,最后利用Hough直线检测找到最大外接矩形,这种方式不能自动的调整角度,肯呢个比较麻烦。
这里选择第一种方式。
首先考虑如果这个图片的角度正好,不需要调整的情况。
算法步骤:
(1)首先读入图片,并转换成灰度图像gray_src。
(2)对gray_src图像进行canny边缘检测,得到一张单通道边缘图片canny_out。
(3)对 canny_out图像进行轮廓检测,并得到多组轮廓信息存于vector容器中。
(4)循环检测筛选合适的轮廓,判断每个轮廓的最小外接矩阵的大小是否符合条件,符合条件的轮廓的外接矩形bbox保存下来。
(5)最后利用得到的bbox获取切边后的图像。
注意事项:canny检测的阈值,我是事先通过trackbar调出来的,大概是50左右。
代码如下:
void FindROI(int, void*) {
//先转换成灰度图像
cvtColor(src, gray_src, CV_BGR2GRAY);
//Canny检测,采用是L1计算方式(false)
Mat canny_output;
Canny(gray_src, canny_output, threshold_value, threshold_value * 2, 3, false);
//定义数组存放检测到外形信息,在进行轮廓发现,这会有很多轮廓
vector<vector<Point>>contours;
vector<Vec4i>hireachy;
findContours(canny_output, contours, hireachy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
//定义轮廓的外接矩形最小的宽度和长度
int minw = src.cols*0.75;
int minh = src.rows*0.75;
//定义随机数
RNG rng(12345);
//定义矩形承接合适轮廓的最小外接矩形
Rect bbox;
//定义模板用于把轮廓画出来
Mat drawImage = Mat::zeros(src.size(), CV_8SC3);
printf("%d\n", contours.size());
for (size_t t = 0; t < contours.size(); t++) {
//寻找每个轮廓的最小的外接矩形,这个矩形可以使多角度的。
RotatedRect minRect = minAreaRect(contours[t]);
//找到最小矩形的角度,然后打印出来
float degree = abs(minRect.angle);
//printf("current angle:%f\n", degree);
//判断最小的矩形是否大于最小宽度和高度
if(minRect.size.width > minw && minRect.size.height > minh&& minRect.size.width < (src.cols - 5)) {
//提取4个角的信息
Point2f pts[4];
minRect.points(pts);
bbox = minRect.boundingRect();
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
//绘制4个点的连线,0,1,2,3。没有4,所以第二点对4 取模即可。
for (int i = 0; i < 4; i++) {
line(drawImage, pts[i], pts[(i + 1) % 4], color, 2, 8, 0);
}
}
}
imshow(output_win, drawImage);
//显示最后的切边的成图
if (bbox.width > 0 && bbox.height > 0) {
Mat roiImg = src(bbox);
imshow(roi_win, roiImg);
}
}这个是滑动窗口的代码
//设置全局变量
const char* output_win = "Contours";
int max_level = 255; //滑动条的最大值
int threshold_value =100;//阈值的初始值
//滑动窗口
createTrackbar("Threshold:", output_win, &threshold_value, max_level, FindROI);
FindROI(0,0);最后的结果图如下:
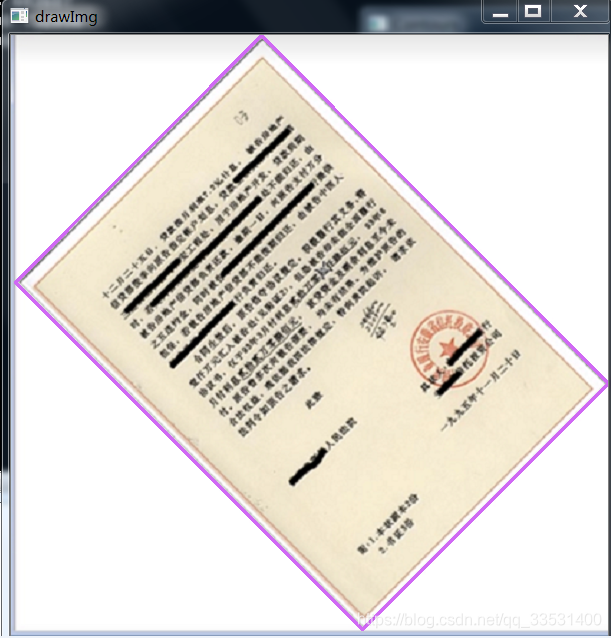
接下来讨论下如果图片不是正放,存在角度问题的。
算法基本思想:可以想找图片的最小外接矩形,这个矩形的角度肯定不是正的。然后对该矩形进行角度的调整,最后再切边。
也可以对矩形框出来的ROI区域进行切边,之后再调整角度。
接下来的代码完成角度的调整。调整之后对画出来的ROI区域再用上述的切边程序完成白边的去除。
void Check_Skew(int, void*) {
//转换成灰度图像
cvtColor(src, gray_src, CV_BGR2GRAY);
//Canny检测
Mat canny_out;
Canny(gray_src, canny_out, threshold_value, threshold_value * 2, 3, false);
//轮廓发现
vector<vector<Point>>contours;
vector<Vec4i>hireachy;
findContours(canny_out, contours, hireachy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
//先找出最小的外接矩形框
Mat drawImg = Mat::zeros(src.size(), CV_8UC3);
float maxw = 0;
float maxh = 0;
double degree = 0;
for (size_t t = 0; t < contours.size(); t++) {
RotatedRect minRect = minAreaRect(contours[t]);
degree = abs(minRect.angle);
if (degree > 0) {
maxw = max(maxw, minRect.size.width);
maxh = max(maxh, minRect.size.height);
}
}
RNG rng(123456);
//求出外接矩形框的角度
for (size_t t = 0; t < contours.size(); t++) {
RotatedRect minRect = minAreaRect(contours[t]);
if (maxw == minRect.size.width&&maxh == minRect.size.height) {
degree = minRect.angle;
Point2f pts[4];
minRect.points(pts);
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
for (int i = 0; i < 4; i++) {
line(drawImg, pts[i], pts[(i + 1) % 4], color, 2, 8, 0);
}
}
}
printf("max width:%f\n", maxw);
printf("max height:%f\n", maxh);
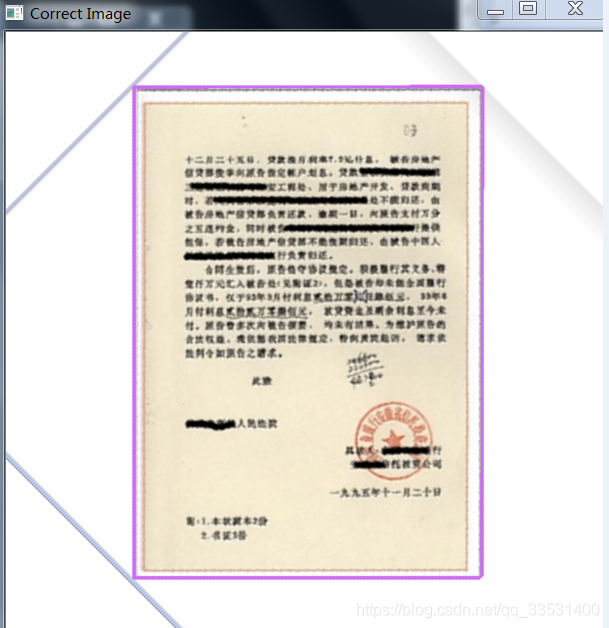
printf("degree:%f\n", degree);
//寻找矩形框的旋转中心,就是整张图片的中心点作为旋转中心
Point2f center(src.cols / 2, src.rows / 2);
//根据中心点和旋转角度生成旋转矩阵
Mat rotm = getRotationMatrix2D(center, degree, 1.0);
//仿射变换,将图像的角度矫正,得到最终的结果dst
Mat dst;
warpAffine(src, dst, rotm, src.size(), INTER_LINEAR, 0, Scalar(255, 255, 255));
imshow("Correct Image", dst);
}

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









