






首先说明,此篇博客是我在初学匈牙利算法求二分图最大匹配时将看到过的所有很好很经典博客里简单易懂或者精彩的部分摘取组合而成的。每一篇博客侧重点不同,有些讲的比较粗略但是另一些博客很详细,所以我觉得将这些精华聚合在一起还是很重要的,每篇博客我都会标明出处。另外有些地方我也会增加一些我自己的见解,如果有不对的地方,希望各位大佬指出。如果您觉得好的话欢迎转载,但请说明出处:http://blog.csdn.NET/qq_34374664/article/details/52787481
基础知识储备->增广路径概念(转自百度百科):
另一个解释
1.一条交替路径是指这样一条路径,其中的每一条边交替地属于或不属于匹配 M。比如说,第一、三、五条边属于 M,而第二、四、六条不属于 M,等等。
2.一条增广路径是指从 M 中没有用到的顶点开始,并从 M 中没有用到的顶点结束的交替路径。

概念及原理部分:转自:http://blog.csdn.net/xuguangsoft/article/details/7861988
二分图又称作二部图,是图论中的一种特殊模型。 设G=(V,E)是一个无向图,如果顶点V可分割为两个互不相交的子集(A,B),并且图中的每条边(i,j)所关联的两个顶点i和j分别属于这两个不同的顶点集(i in A,j in B),则称图G为一个二分图。

二分图的最大匹配:
匈牙利算法
完美匹配: 如果所有点都在匹配边上,称这个最大匹配是完美匹配。
最小覆盖: 最小覆盖要求用最少的点(X集合或Y集合的都行)让每条边都至少和其中一个点关联。可以证明:最少的点(即覆盖数)=最大匹配数
最小路径覆盖:
用尽量少的不相交简单路径覆盖有向无环图G的所有结点。解决此类问题可以建立一个二分图模型。把所有顶点i拆成两个:X结点集中的i和Y结点集中的i',如果有边i->j,则在二分图中引入边i->j',设二分图最大匹配为m,则结果就是n-m。
最大独立集问题:
在N个点的图G中选出m个点,使这m个点两两之间没有边.求m最大值.
如果图G满足二分图条件,则可以用二分图匹配来做.最大独立集点数 = N - 最大匹配数
二分图最大匹配问题的匈牙利算法:
分图的最大匹配有两种求法,第一种是最大流(我在此假设读者已有网络流的知识);第二种就是我现在要讲的匈牙利算法。这个算法说白了就是最大流的算法,但是它跟据二分图匹配这个问题的特点,把最大流算法做了简化,提高了效率。
最大流算法的核心问题就是找增广路径(augment path)。匈牙利算法也不例外,它的基本模式就是:
| 初始时最大匹配为空 while 找得到增广路径 do 把增广路径加入到最大匹配中去 |
可见和最大流算法是一样的。但是这里的增广路径就有它一定的特殊性,下面我来分析一下。
(注:匈牙利算法虽然根本上是最大流算法,但是它不需要建网络模型,所以图中不再需要源点和汇点,仅仅是一个二分图。每条边也不需要有方向。)

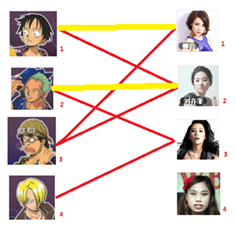
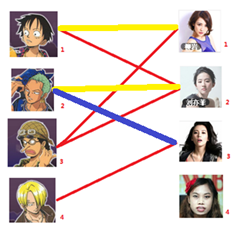
图1是我给出的二分图中的一个匹配:[1,5]和[2,6]。图2就是在这个匹配的基础上找到的一条增广路径:3->6->2->5->1->4。我们借由它来描述一下二分图中的增广路径的性质:
(1)有奇数条边。
(2)起点在二分图的左半边,终点在右半边。
(3)路径上的点一定是一个在左半边,一个在右半边,交替出现。(其实二分图的性质就决定了这一点,因为二分图同一边的点之间没有边相连,不要忘记哦。)
(4)整条路径上没有重复的点。
(5)起点和终点都是目前还没有配对的点,而其它所有点都是已经配好对的。(如图1、图2所示,[1,5]和[2,6]在图1中是两对已经配好对的点;而起点3和终点4目前还没有与其它点配对。)
(6)路径上的所有第奇数条边都不在原匹配中,所有第偶数条边都出现在原匹配中。(如图1、图2所示,原有的匹配是[1,5]和[2,6],这两条配匹的边在图2给出的增广路径中分边是第2和第4条边。而增广路径的第1、3、5条边都没有出现在图1给出的匹配中。)
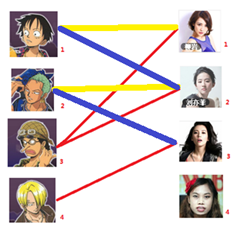
(7)最后,也是最重要的一条,把增广路径上的所有第奇数条边加入到原匹配中去,并把增广路径中的所有第偶数条边从原匹配中删除(这个操作称为增广路径的取反),则新的匹配数就比原匹配数增加了1个。(如图2所示,新的匹配就是所有蓝色的边,而所有红色的边则从原匹配中删除。则新的匹配数为3。)
不难想通,在最初始时,还没有任何匹配时,图1中的两条灰色的边本身也是增广路径。因此在这张二分图中寻找最大配匹的过程可能如下:
(1)找到增广路径1->5,把它取反,则匹配数增加到1。
(2)找到增广路径2->6,把它取反,则匹配数增加到2。
(3)找到增广路径3->6->2->5->1->4,把它取反,则匹配数增加到3。
(4)再也找不到增广路径,结束。
当然,这只是一种可能的流程。也可能有别的找增广路径的顺序,或者找到不同的增广路径,最终的匹配方案也可能不一样。但是最大匹配数一定都是相同的。
对于增广路径还可以用一个递归的方法来描述。这个描述不一定最准确,但是它揭示了寻找增广路径的一般方法:
“从点A出发的增广路径”一定首先连向一个在原匹配中没有与点A配对的点B。如果点B在原匹配中没有与任何点配对,则它就是这条增广路径的终点;反之,如果点B已与点C配对,那么这条增广路径就是从A到B,再从B到C,再加上“从点C出发的增广路径”。并且,这条从C出发的增广路径中不能与前半部分的增广路径有重复的点。
比如图2中,我们要寻找一条从3出发的增广路径,要做以下3步:
(1)首先从3出发,它能连到的点只有6,而6在图1中已经与2配对,所以目前的增广路径就是3->6->2再加上从2出发的增广路径。
(2)从2出发,它能连到的不与前半部分路径重复的点只有5,而且5确实在原匹配中没有与2配对。所以从2连到5。但5在图1中已经与1配对,所以目前的增广路径为3->6->2->5->1再加上从1出发的增广路径。
(3)从1出发,能连到的不与自已配对并且不与前半部分路径重复的点只有4。因为4在图1中没有与任何点配对,所以它就是终点。所以最终的增广路径是3->6->2->5->1->4。
但是严格地说,以上过程中从2出发的增广路径(2->5->1->4)和从1出发的增广路径(1->4)并不是真正的增广路径。因为它们不符合前面讲过的增广路径的第5条性质,它们的起点都是已经配过对的点。我们在这里称它们为“增广路径”只是为了方便说明整个搜寻的过程。而这两条路径本身只能算是两个不为外界所知的子过程的返回结果。
显然,从上面的例子可以看出,搜寻增广路径的方法就是DFS,可以写成一个递归函数。当然,用BFS也完全可以实现。
至此,理论基础部份讲完了。但是要完成匈牙利算法,还需要一个重要的定理:
如果从一个点A出发,没有找到增广路径,那么无论再从别的点出发找到多少增广路径来改变现在的匹配,从A出发都永远找不到增广路径。
要用文字来证明这个定理很繁,话很难说,要么我还得多画一张图,我在此就省了。其实你自己画几个图,试图举两个反例,这个定理不难想通的。(给个提示。如果你试图举个反例来说明在找到了别的增广路径并改变了现有的匹配后,从A出发就能找到增广路径。那么,在这种情况下,肯定在找到别的增广路径之前,就能从A出发找到增广路径。这就与假设矛盾了。)
有了这个定理,匈牙利算法就成形了。如下:
| 初始时最大匹配为空 for 二分图左半边的每个点i do 从点i出发寻找增广路径。如果找到,则把它取反(即增加了总了匹配数)。 |
变种1:二分图的最小顶点覆盖
在二分图中求最少的点,让每条边都至少和其中的一个点关联,这就是“二分图的最小顶点覆盖”。
hdoj1150
二分图的最小顶点覆盖数 = 二分图的最大匹配数
变种2:DAG图(无回路有向图)的最小路径覆盖
用尽量少的不相交简单路径覆盖有向无环图(DAG)的所有顶点,这就是DAG图的最小路径覆盖问题。
hdoj1151
DAG图的最小路径覆盖数 = 节点数(n)- 最大匹配数(m)
关键:求二分图的最大匹配数
变种3: 二分图的最大独立集
hdoj1068
二分图的最大独立集数 = 节点数(n)- 最大匹配数(m)
关键:求二分图的最大匹配数
参考资料:
1,http://imlazy.ycool.com/post.1603708.html
2,杭电ACM PPT
【书本上的算法往往讲得非常复杂,我和我的朋友计划用一些简单通俗的例子来描述算法的流程】
匈牙利算法是由匈牙利数学家Edmonds于1965年提出,因而得名。匈牙利算法是基于Hall定理中充分性证明的思想,它是部图匹配最常见的算法,该算法的核心就是寻找增广路径,它是一种用增广路径求二分图最大匹配的算法。
-------等等,看得头大?那么请看下面的版本:
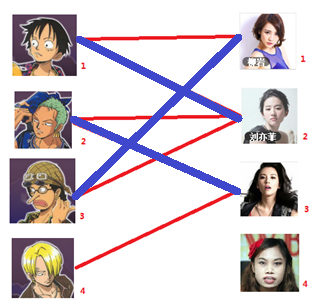
通过数代人的努力,你终于赶上了剩男剩女的大潮,假设你是一位光荣的新世纪媒人,在你的手上有N个剩男,M个剩女,每个人都可能对多名异性有好感( -_-||暂时不考虑特殊的性取向),如果一对男女互有好感,那么你就可以把这一对撮合在一起,现在让我们无视掉所有的单相思(好忧伤的感觉
-_-||暂时不考虑特殊的性取向),如果一对男女互有好感,那么你就可以把这一对撮合在一起,现在让我们无视掉所有的单相思(好忧伤的感觉 ),你拥有的大概就是下面这样一张关系图,每一条连线都表示互有好感。
),你拥有的大概就是下面这样一张关系图,每一条连线都表示互有好感。
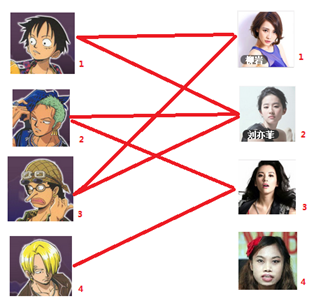
本着救人一命,胜造七级浮屠的原则,你想要尽可能地撮合更多的情侣,匈牙利算法的工作模式会教你这样做:
===============================================================================
一: 先试着给1号男生找妹子,发现第一个和他相连的1号女生还名花无主,got it,连上一条蓝线
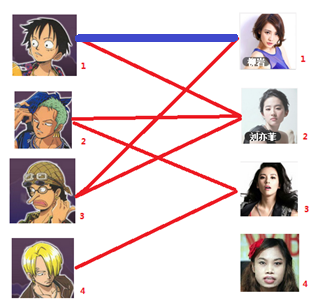
===============================================================================
二:接着给2号男生找妹子,发现第一个和他相连的2号女生名花无主,got it
===============================================================================
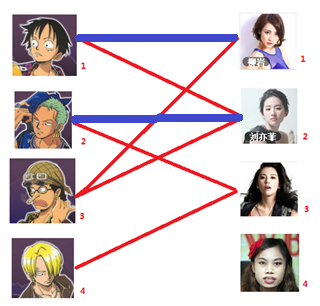
三:接下来是3号男生,很遗憾1号女生已经有主了,怎么办呢?
我们试着给之前1号女生匹配的男生(也就是1号男生)另外分配一个妹子。
(黄色表示这条边被临时拆掉)
与1号男生相连的第二个女生是2号女生,但是2号女生也有主了,怎么办呢?我们再试着给2号女生的原配( )重新找个妹子(注意这个步骤和上面是一样的,这是一个递归的过程)
)重新找个妹子(注意这个步骤和上面是一样的,这是一个递归的过程)
此时发现2号男生还能找到3号女生,那么之前的问题迎刃而解了,回溯回去
2号男生可以找3号妹子~~~ 1号男生可以找2号妹子了~~~ 3号男生可以找1号妹子
所以第三步最后的结果就是:
===============================================================================
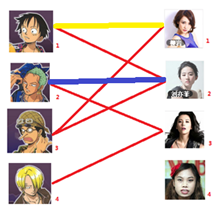
四: 接下来是4号男生,很遗憾,按照第三步的节奏我们没法给4号男生腾出来一个妹子,我们实在是无能为力了……香吉士同学走好。
===============================================================================
其原则大概是:有机会上,没机会创造机会也要上
【code】
在主程序我们这样做:每一步相当于我们上面描述的一二三四中的一步
zhuanzihttp://www.cnblogs.com/shenben/p/5573788.html
基本概念—二分图
二分图:是图论中的一种特殊模型。若能将无向图G=(V,E)的顶点V划分为两个交集为空的顶点集,并且任意边的两个端点都分属于两个集合,则称图G为一个为二分图。

匹配:一个匹配即一个包含若干条边的集合,且其中任意两条边没有公共端点。如下图,图3的红边即为图2的一个匹配。


1 最大匹配
在G的一个子图M中,M的边集中的任意两条边都不依附于同一个顶点,则称M是一个匹配。选择这样的边数最大的子集称为图的最大匹配问题,最大匹配的边数称为最大匹配数.如果一个匹配中,图中的每个顶点都和图中某条边相关联,则称此匹配为完全匹配,也称作完备匹配。如果在左右两边加上源汇点后,图G等价于一个网络流,最大匹配问题可以转为最大流的问题。解决此问的匈牙利算法的本质就是寻找最大流的增广路径。上图中的最大匹配如下图红边所示:
2 最优匹配
最优匹配又称为带权最大匹配,是指在带有权值边的二分图中,求一个匹配使得匹配边上的权值和最大。一般X和Y集合顶点个数相同,最优匹配也是一个完备匹配,即每个顶点都被匹配。如果个数不相等,可以通过补点加0边实现转化。一般使用KM算法解决该问题。
3 最小覆盖
二分图的最小覆盖分为最小顶点覆盖和最小路径覆盖:
①最小顶点覆盖是指最少的顶点数使得二分图G中的每条边都至少与其中一个点相关联,二分图的最小顶点覆盖数=二分图的最大匹配数;
②最小路径覆盖也称为最小边覆盖,是指用尽量少的不相交简单路径覆盖二分图中的所有顶点。二分图的最小路径覆盖数=|V|-二分图的最大匹配数;
4 最大独立集
最大独立集是指寻找一个点集,使得其中任意两点在图中无对应边。对于一般图来说,最大独立集是一个NP完全问题,对于二分图来说最大独立集=|V|-二分图的最大匹配数。如下图中黑色点即为一个最大独立集:
基本概念—匈牙利算法
交替路:从一个未匹配点出发,依次经过非匹配边、匹配边、非匹配边...形成的路径叫交替路。*
增广路:从一个未匹配点出发,走交替路,如果途径另一个未匹配点(出发的点不算),则这条交替路称为增广路(agumenting path)。
二、最大匹配与最小点覆盖
最小点覆盖:假如选了一个点就相当于覆盖了以它为端点的所有边,你需要选择最少的点来覆盖所有的边
最小割定理是一个二分图中很重要的定理:一个二分图中的最大匹配数等于这个图中的最小点覆盖数。
最小点集覆盖==最大匹配。在这里解释一下原因,首先,最小点集覆盖一定>=最大匹配,因为假设最大匹配为n,那么我们就得到了n条互不相邻的边,光覆盖这些边就要用到n个点。现在我们来思考为什么最小点击覆盖一定<=最大匹配。任何一种n个点的最小点击覆盖,一定可以转化成一个n的最大匹配。因为最小点集覆盖中的每个点都能找到至少一条只有一个端点在点集中的边(如果找不到则说明该点所有的边的另外一个端点都被覆盖,所以该点则没必要被覆盖,和它在最小点集覆盖中相矛盾),只要每个端点都选择一个这样的边,就必然能转化为一个匹配数与点集覆盖的点数相等的匹配方案。所以最大匹配至少为最小点集覆盖数,即最小点击覆盖一定<=最大匹配。综上,二者相等。
三、匈牙利算法
由增广路的性质,增广路中的匹配边总是比未匹配边多一条,所以如果我们放弃一条增广路中的匹配边,选取未匹配边作为匹配边,则匹配的数量就会增加。匈牙利算法就是在不断寻找增广路,如果找不到增广路,就说明达到了最大匹配。
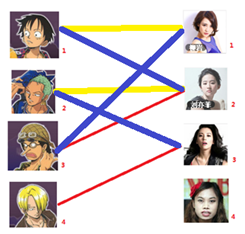
先给一个例子
1、起始没有匹配

2、选中第一个x点找第一跟连线

3、选中第二个点找第二跟连线

4、发现x3的第一条边x3y1已经被人占了,找出x3出发的的交错路径x3-y1-x1-y4,把交错路中已在匹配上的边x1y1从匹配中去掉,剩余的边x3y1 x1y4加到匹配中去

5、同理加入x4,x5。
匈牙利算法可以深度有限或者广度优先,刚才的示例是深度优先,即x3找y1,y1已经有匹配,则找交错路。若是广度优先,应为:x3找y1,y1有匹配,x3找y2。















 930
930

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









