







准备工作:下载图片路径:https://docs.opencv.org/2.4/_downloads/pattern.png
打印并拍照显示
第一步:在Matlab的菜单栏中APP查找Camera Calibrator工具;
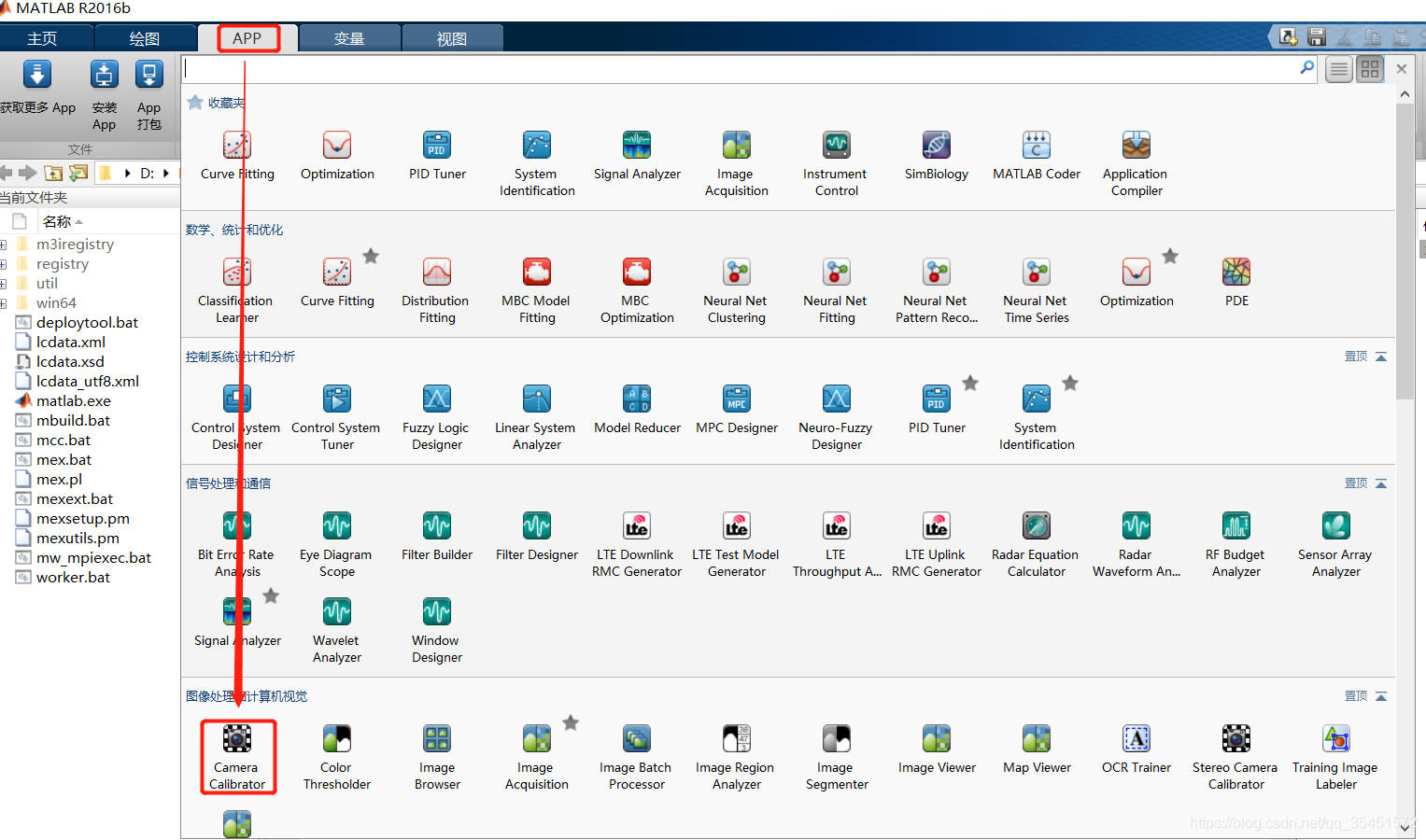
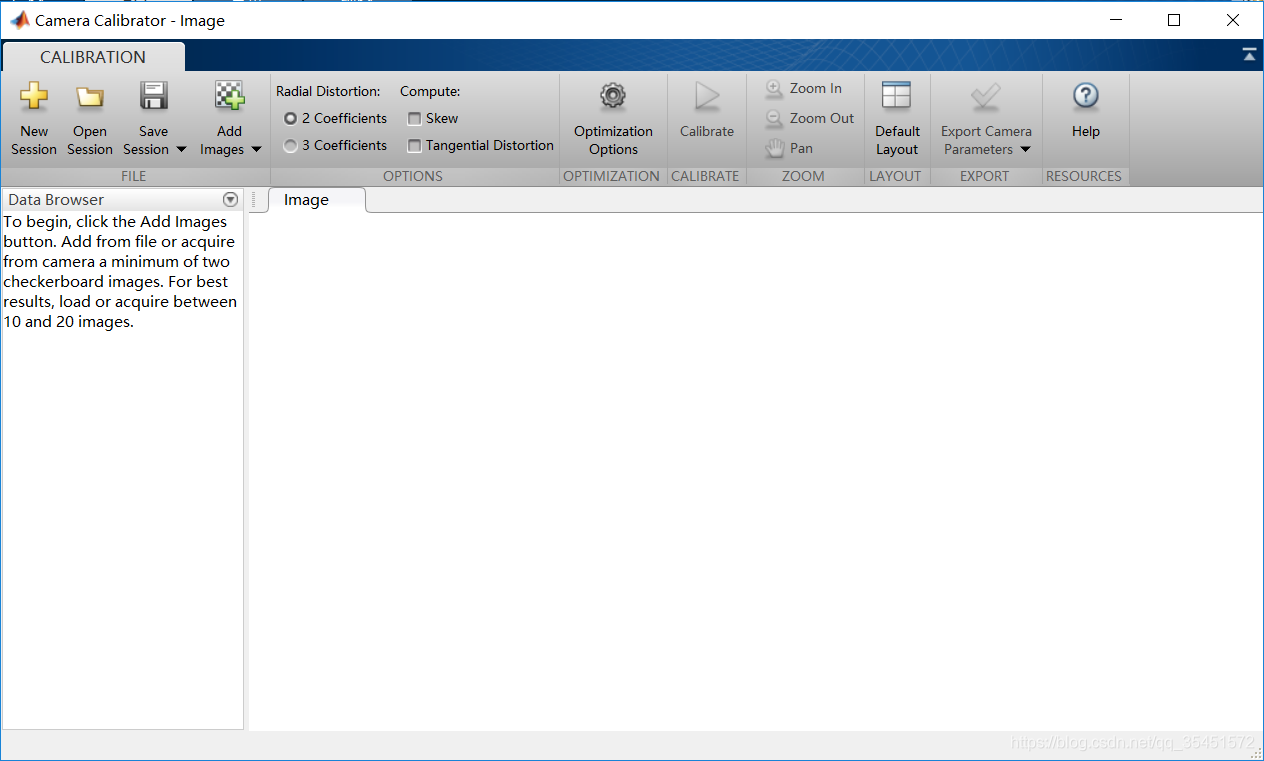
进去以后我们会进入到Camera Calibration工具的UI界面;
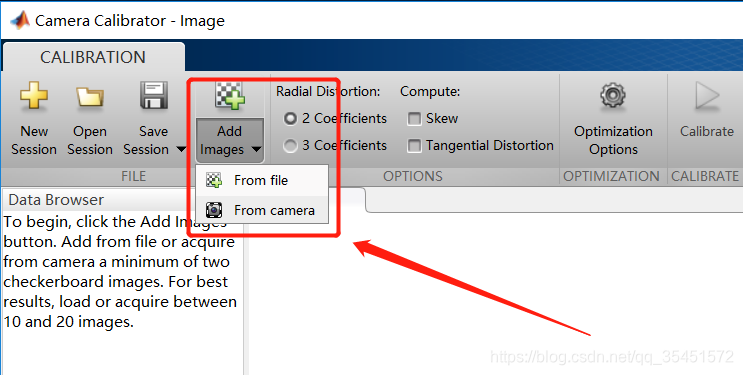
第二步:选择Add Images 按钮,添加照片。这里我们建议是提前拍好照片直接导入的,如果选择“From Camera”,设备还会调用摄像头,调用Matlab 摄像头模块,会比较麻烦的。
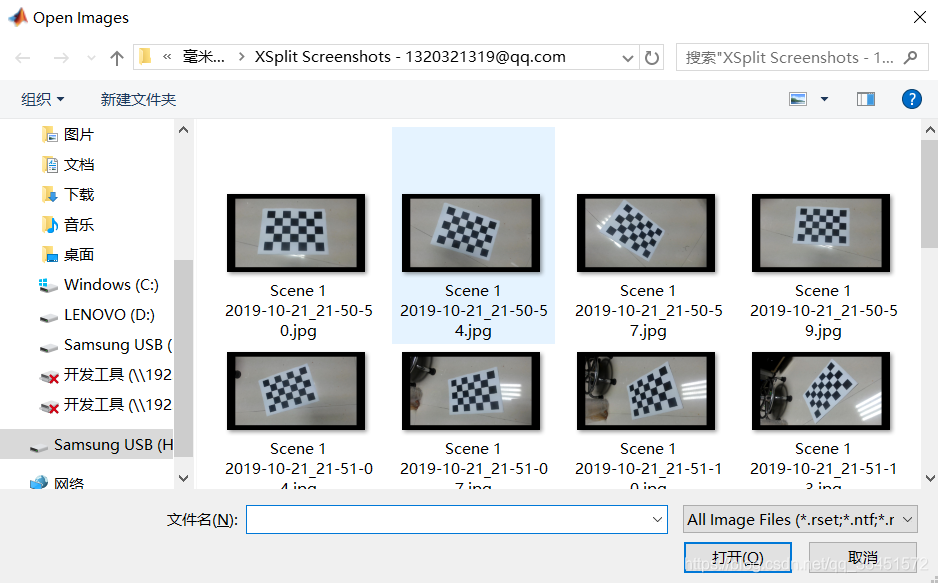
第三步:导入我们事先准备好的图片;
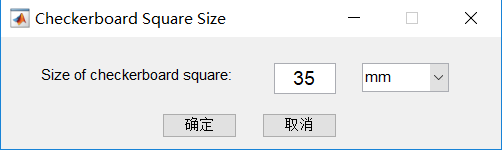
第四步:输入我们之前测量好的每个格子的大小。
接着Matlab就会将我们的图像导入到自己的模块中。
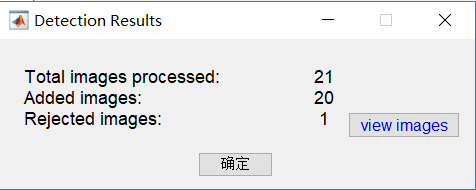
当导入结束以后,会有一个检测结果,会显示是否有图片被拒绝,因为拍摄等一些原因会存在不清晰,Matlab不能正常检测的结果。
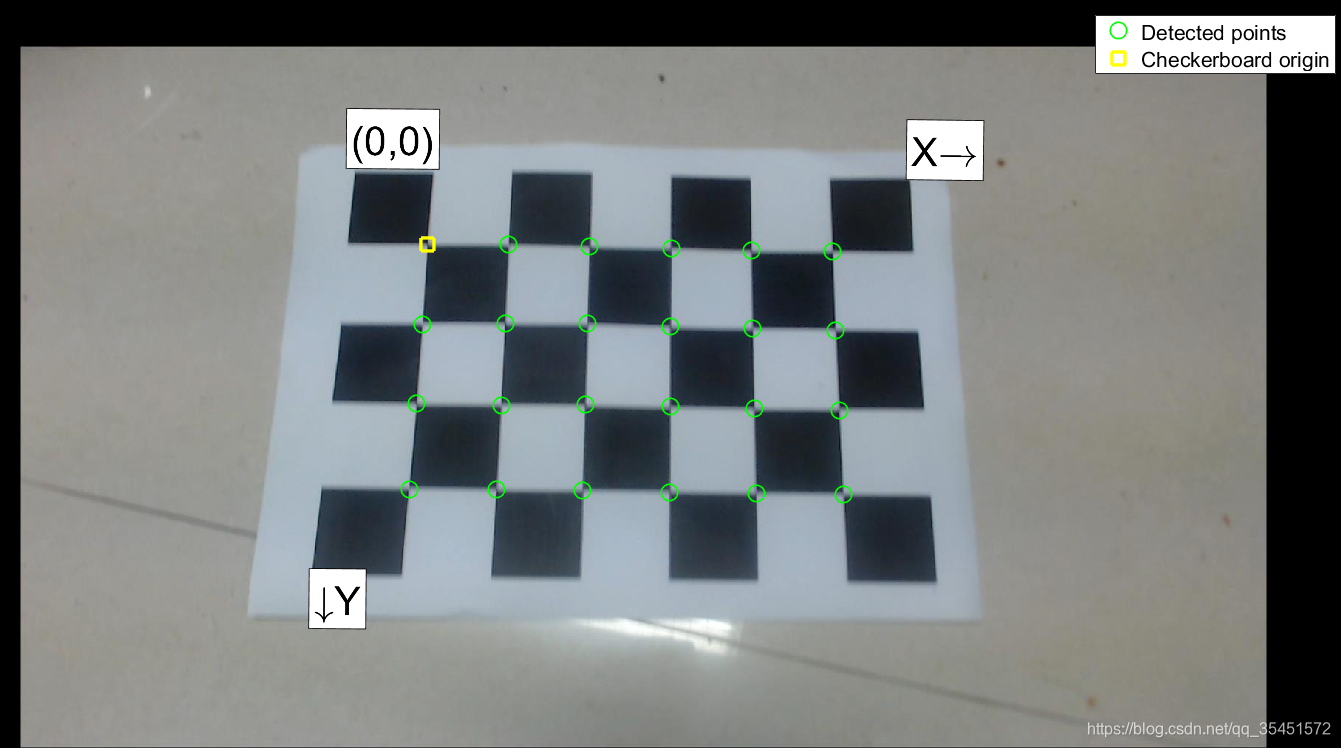
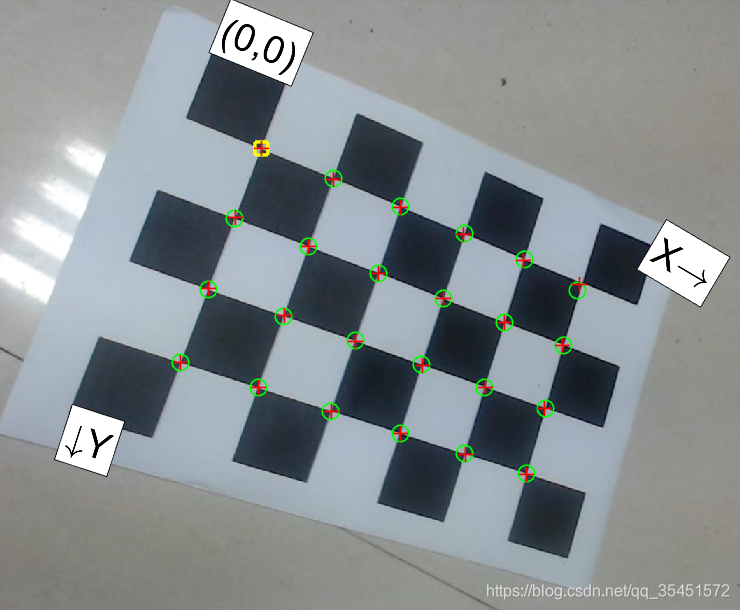
当我们都导入后主界面将会显示每张图像建立坐标系,以及每个交叉点的位置。
第五步:选择开始标定。

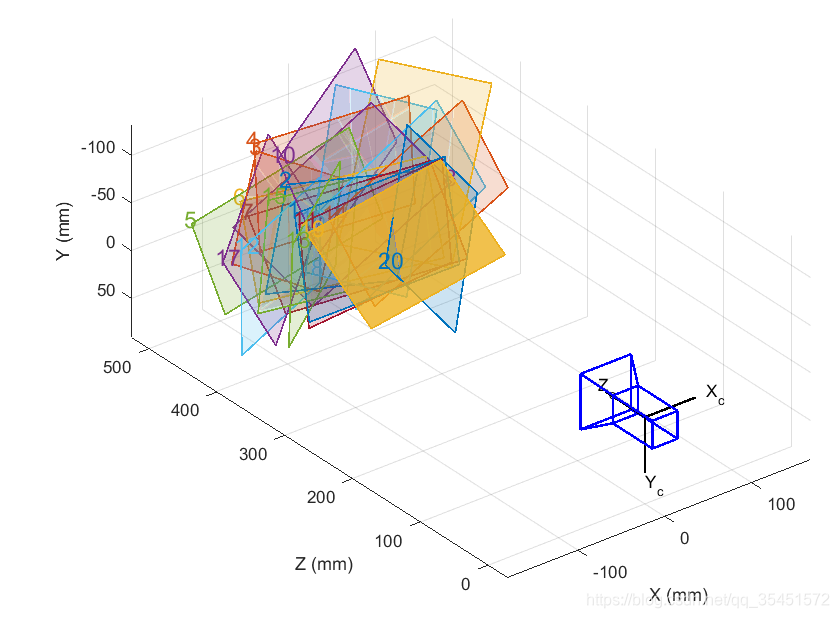
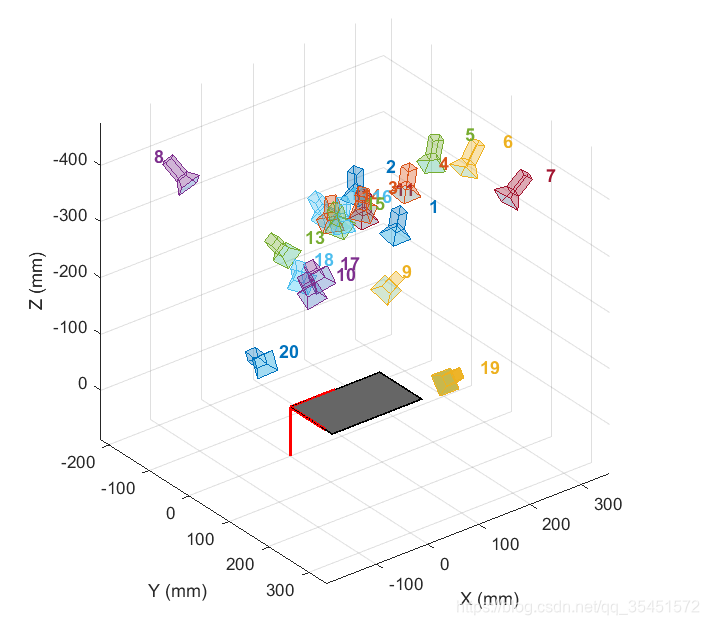
校正完后就能够看到Matlab模拟的 3D 空间位置拍摄图像。
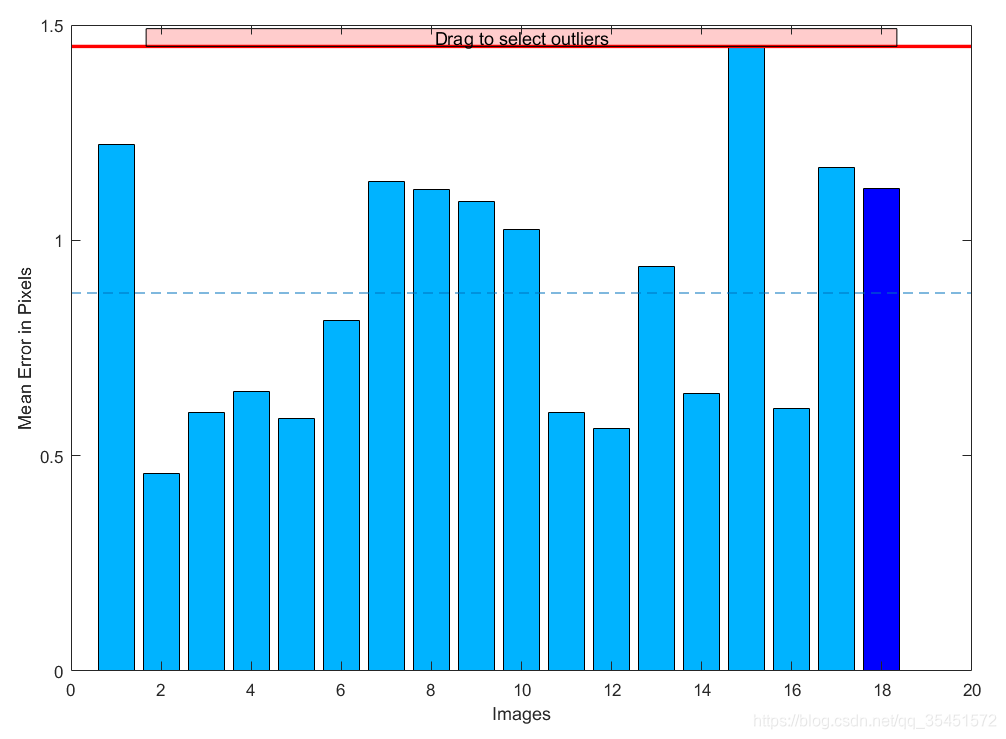
同时还可以得到每张图像中的误差统计。
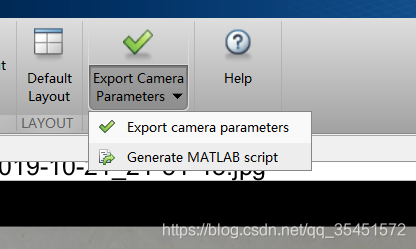
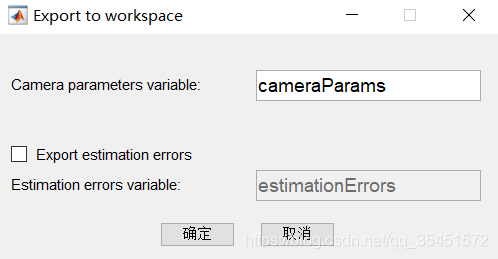
第六步:导出相机参数,我们可以选择直接导出,就会在Matlab主页面多出来一下cameraParams,它里边就存储这相机的参数。
如下是相机参数截图。
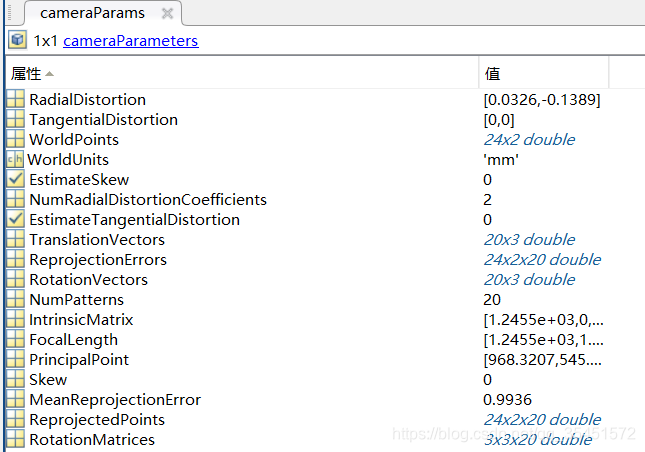
参数解释:
| 英文名称 | 中文名称 |
|---|---|
| RadialDistortion | 镜像畸变 |
| Tangential Distortion | 切向失真 |
| NumRadialDistortionCoefficient | 数值径向失真系数 |
| Translation Vectors | 旋转矢量 |
| Reprojection Errors | 重投影误差 |
| RotationVectors | 旋转矢量 |
| IntrinsicMatrix | 内参矩阵 |
| Focal Length | 焦距 |
| Rotation Matrices | 旋转矩阵 |


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}